智能軌道檢測儀的應用研究
2011-06-19 06:30:36上海鐵路局科研所
上海鐵道增刊 2011年1期
鄭 健 上海鐵路局科研所
SGJ-T-SRI1型智能軌道檢測儀(以下簡稱軌檢儀)由上海鐵路局自主研制成功,測量機理和結構均有別于國內外同類產品,它基于軌道三維精密控制網,采用靜態交會、動態跟蹤測量模式,自動、連續、精確地采集軌道幾何參數,以提高線路坐標的測量精度和檢測效率,是一種適應高速鐵路精密檢測的新型技術設備。
1 適用檢測功能
1.1 功能模式特征
本軌檢儀利用架設在軌檢小車上全站儀的自動照準功能,照準沿線路兩側設置的三維精密控制網控制樁點(CPⅢ),靜態交會測量出測站三維坐標和精確測量軌道衛星車起、終點坐標;兩靜態交會測點間采用動態跟蹤測量模式,高密度自動檢測線路左右軌及中線坐標、軌頂高程以及軌距、水平、高低和方向等軌道靜態參數,通過計算機記錄整理并形成相關數據報表,以滿足工務部門對高速鐵路軌道"養檢修"的需要。
1.2 功能適用性
本軌檢儀主要適用于檢測軌道的平順性。
1.2.1 垂向軌道不平順
⑴高低不平順:指軌道沿鋼軌長度方向在垂向的凸凹不平。一般情況下,左、右軌高低的變化趨勢基本一致,但在短距離內各自的變化往往不同,所以還必須區分左、右軌高低。
⑵水平不平順:指軌道同一橫截面上左、右兩軌頂面的高差;在曲線上是指扣除正常超高值的偏差部分,在直線上也是指扣除將一側鋼軌故意抬高形成的水平平均值后的差值。
⑶扭曲不平順(三角坑):指左、右兩軌項面相對于軌道平面的扭曲,用相隔一定距離的兩個橫截面水平幅值的代數差度量。
⑷軌面短波不平順:指鋼軌頂面小范圍內的不平順。
1.2.2 橫向軌道不平順
⑴軌道方向不平順:常簡稱軌向不平順或方向不平順,是指軌頭內側面沿長度方向的橫向凸凹不平順;左、右軌方向變化往往不同,需區分左軌方向和右軌方向,并將左、右軌方向的平均值作為軌道的中心線方向偏差。
⑵軌距偏差:指在軌頂面以下16mm處量得的左、右兩軌內側距離相對于標準軌距(1435mm)的偏差。
1.3 功能數據流程
本軌檢儀功能實現的數據流程見圖1。

圖1軌檢儀系統數據流程
1.4 功能實現的核心測量部件
支撐本軌檢儀實現自動、連續、精確地測量,與之匹配的測量部件的精度、范圍等性能指標十分關鍵,其核心測量部件主要有全站儀、自動安平、傳感器和編碼器。
1.4.1 全站儀
全站儀選用徠卡、天寶等國外品牌智能型全站儀;以徠卡(Leica)為例,主要功能包括"項目管理"、"系統設置"、"數據采集"三大部分,"系統設置"含通訊設置、傳感器校準、限差、棱鏡、標定等參數設置,"數據采集"含起測點靜態測量、軌檢小車動態測量、衛星小車動態測量、自動交會靜態測量等部分;測角精度不低于1°,測距精度不低于1 mm+1 ppm,且實現自動追蹤。
1.4.2 自動安平
自動安平選用德國進口的AD-12型,安平范圍為±90,精度為±0.0090,最大載重10 kg,供電電源12VDC,工作電流0.11 A。
1.4.3 位移傳感器
位移傳感器選用德國NOVOTECHNIK電位器式TS系列直線位移傳感器,模擬量輸出信號,穿透伸縮軸,插頭式連接,重復精度為0.002 mm,線性精度為±0.075%,兩個位移傳感器的行程分別為25和100 mm,最高操作速度為10 m/s。
1.4.4 傾角傳感器
雙軸傾角傳感器選用加拿大進口的SANG1000-SD015系列動態雙軸傾角傳感器,傾角數據采樣頻率為40Hz,多種補償技術,測量范圍為±150,精度±0.0020,換算水平(超高)的最大精度為0.06mm;工作溫度:-40℃~70℃。
1.4.5編碼器
編碼器選用GAM60系列EasyPro智能型絕對值編碼器,軸每周輸出8192(13位)個碼或者65536(16位)個碼,可設定連續圈數為1-4096圈,數字通訊輸出最快可設200kHz bps;智能設定軟件界面,其輸出信號可選擇直接對應測量的角度、長度、速度量值,或直接輸出多組凸輪開關信號;以RS485信號轉RS232或者USB信號連接計算機,可以EasyPro設定地址和速率等參數;具有停電記憶功能,工作電壓8~30VDC。
2 系統標定
系統標定是軌檢儀應用的關鍵環節,是確保檢測數據準確的前提條件;軌檢小車上安裝有全站儀、自動安平和傳感器,是核心組件,應在實驗室標定臺上實施進行系統標定。
2.1 軌檢小車標定內容

圖2 軌檢小車結構示意圖
軌檢小車結構及參數示意如圖2所示,并作如下定義,其中:
A—表示全站儀觀測中心;B—表示自動安平平臺旋轉軸中心;
C—表示用作軌距測量參考點的軌檢小車雙輪部分內軌道頂點。
根據以上定義,軌檢小車使用前需要對以下參數進行標定:
AB—表示全站儀的觀測中心到自動安平平臺旋轉中心的距離 (用d表示);
BE—表示自動安平平臺旋轉軸中心到鋼軌面的距離(h);
CE—表示自動安平平臺旋轉軸中心到軌距測量參考點的距離(s);
CD—位于標準軌距上(1435mm),位移傳感器的標定值(a);
FG—位于標準軌距上(1435 mm),位移傳感器的標定值(b);
EF—位于標準軌距上(1435 mm),測定位移固定的長度(t),按公式t=1435-(a+b)計算。
2.2 軌檢小車標定方法
標定實驗室應由法定計量技術機構檢定合格,測量器具量程、精度應滿足要求,做到測量方法科學、讀數準確。實驗室標定臺示意見圖3所示。

圖3 軌檢儀標定臺
經實驗室標定,取得095號、125號軌檢小車的相關參數見表1。x、y分別為傾角傳感器x軸、y軸的標定值;r為小車測量輪的直徑。
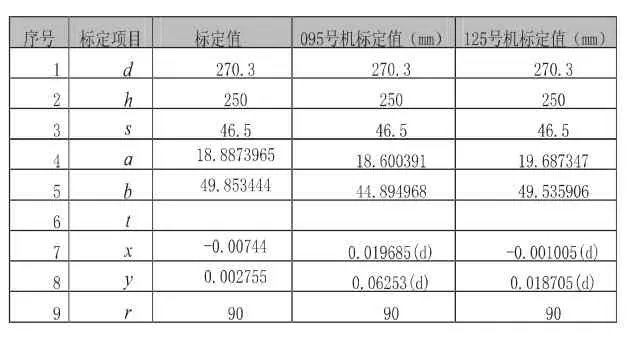
表1 實驗室標定值
2.3 軌檢小車結構參數定義
2.3.1 小車方向定義
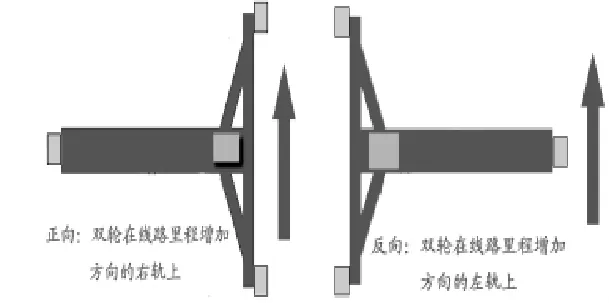
圖4 軌檢小車方向定義示意圖
軌檢小車的方向定義如上圖所示,小車的雙輪在線路里程增加方向的右軌上,定義為正向;小車的雙輪在線路里程增加方向的左軌上,定義為反向。
2.3.2 小車超高定義
軌檢小車的超高定義如上圖所示,小車正向時,沿里程增加方向,測量點處左軌低于右軌為正;小車正向時,沿里程增加方向,測量點處左軌高于右軌為負。

圖5 軌檢小車超高定義示意圖
2.3.3 傳感器方向定義
(1)傾角傳感器:傾角傳感器的X軸平行于線路走向方向;傾角傳感器的Y軸垂直于線路走向方向(平行于超高方向);小車為正向時,左軌高于右軌時,隨著超高絕對值的增大,傾角傳感器Y軸的示值變小;小車為正向時,前高于后時,傾角傳感器X軸的示值變小;(前里程小于后里程)。
(2)位移傳感器:位移傳感器A的量程為25 mm;位移傳感器B量程為100 mm;位移傳感器的示值向外側為增大。
(3)編碼傳感器:正向時,隨里程增加方向示值增加。
3 現場檢測應用
3.1 應用技術關鍵
(1)檢測點布設密度:無砟軌道不大于100 m靜態交會檢測一處,有砟軌道不大于180 m表態交會檢測一處;交會測點間采用跟蹤測量采集數據,系統自動棄異常數據后擬合,提供0.65 m點距數據成果。
(2)用軌道檢測小車檢測正線軌道和道岔的絕對坐標、軌面絕對高程、軌距、軌向、高低、水平等。
(3)依據軌檢小車量測的軌道絕對坐標,計算曲線各要素。
(4)利用軌道檢測小車量測的軌道絕對坐標和軌面高程反算兩點之間的空間距離,進行全線精確的里程貫通。
(5)根據軌檢小車量測的軌道和道岔的靜態幾何數據,與設計數據進行比較,統計出差值,對線路平面位置與設計位置的一致性、平順性作出分析評價。
3.2 應用操作程序
(1)室內準備。前往現場前,一方面,對本軌檢儀整機設備進行清潔保養,在基準平臺上對超高傳感器進行校準以及調頭測量,調整、消除誤差,確保一致性;另一方面,對所檢測線路的設計數據(平曲線、豎曲線、超高等)在計算機中復核無誤后輸入到本軌檢儀軟件系統中。
(2)現場準備。到達現場每回實施測量時,先對控制測點(CPⅢ)進行檢查,確認完好并插裝妥棱鏡,以確保控制點數據(平面坐標及高程)正確無誤;剔除異常控制測點(CPⅢ)。
(3)保證測點。每個測量區間全站儀自由交會時需要保證4個(有碴)或8個(無碴)CPⅢ控制點,以保證軌道線形的檢測精度。
(4)設置基準。進行正確的測量設置,高程和平面位置以路肩側鋼軌為基準。
(5)規范使用。全站儀起始測站靜態測量,系統自動采集軌距和超高值,確認數據無誤后進入數據采集的測站設置;設站的主要內容是選擇所需要觀測的目標點,設置觀測的測回數,獲得各待測目標點與測站點之間的水平方向與天頂距觀測值,從而在數據自動采集過程中自動瞄準并鎖定棱鏡;系統自動化采集,并實時顯示數據采集過程中的狀態信息;系統在半測回、一測回以及各測回觀測完畢后,按設定的限差對數據采集過程進行實時質量控制,對超限情況實時檢核,并提示用戶進行干預;用戶干預可選擇重新測量或忽略超限觀測值;待本測站測量結束且各項誤差符合系統設定限差,表示本測站觀測已完成;對本測站觀測的各目標點測量值進行平差計算,查看與已知坐標的偏差值,以便檢查已知的CPⅢ控測點是否存有問題。做完測量靜態交會后,則進行動態測量衛星小車的X、Y、H坐標,采集衛星小車所處里程以及軌檢小車與衛星小車的距離。軌檢小車動態測量是指衛星小車靜止不動,推動軌檢小車,采集軌檢小車所在位置的軌距、超高、里程。
(6)成果輸出。測量完成后生成成果文件,對軌道幾何形位數據進行輸出做進一步處理,輸出報表,可選擇性的輸出軌道位置、軌距、水平、軌向(長波和短波)、高低(長波和短波)、軌面高程等幾何參數。所有參數都以設計數據、實測數據和偏差值的形式輸出。
3.3 實際應用案例
本軌檢儀研制成功后,先后在甬臺溫、溫福客專(有碴)和滬杭客專(無碴)上現場應用,以650mm為間距,動態測量衛星小車的X、Y、H坐標成,形成處理報表。其測量過程為:起始測站靜態測量(圖6)→動態測量衛星小車的X、Y、H坐標(圖7)→軌檢小車動態測量(圖8),有碴軌道測量實景圖9所示。
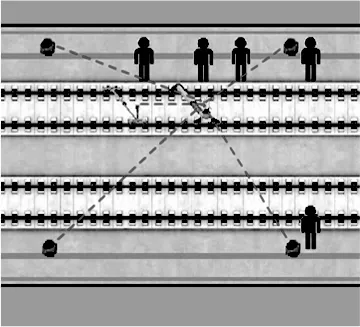
圖6 起始測站靜態測量示意圖

圖7 動態測量衛星小車坐標示意圖
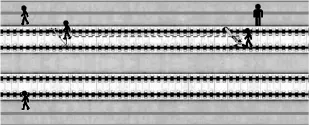
圖8 軌檢小車動態測量

圖9有碴軌道現場測量實景
現僅選2010年8月12日,本軌檢儀在滬杭客專精調期間參與檢測的結果選20個測點數據作為例證,見表2所示。

表2滬杭客專下行K12+748.16--K12+760.51軌道檢測數據表
本軌檢儀在滬杭客專檢測結果已與德國進口的安博格軌檢儀靜態測量結果相對比,數據對等性優良,趨勢性一致,得到了應用檢驗,能滿足線路精調作業和維護養修的需求。
4 結論與建議
SGJ-T-SRI1智能軌道檢測儀在有砟、無碴客運專線軌道上的應用研究表明,本軌檢儀相比同類型其它產品,一是檢測技術先進,檢測精度高,動靜結合,測量效率高達1000~1300m/h;二是操作簡便,檢測數據顯示清晰,易于識別,電池容量較高,適合長時間10~15h連續作業;三是適用性廣,完全適宜夜間天窗點檢測使用,可廣泛應用在新建或開通的客運專線軌道檢測領域。建議應進一步提升全站儀、自動安平與軌檢小車的安裝匹配精度,完善軌檢小車的可拆裝結構與防振功能,優化系統自檢功能,以確保強穩定性與高可靠性。
猜你喜歡
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
北京測繪(2020年12期)2020-12-29 01:37:18
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
工程與建設(2019年3期)2019-10-10 01:40:18
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽科技與產業(2016年3期)2016-05-17 04:32:12
電測與儀表(2016年9期)2016-04-12 00:29:52
