四連桿抽油機(jī)驅(qū)動(dòng)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)分析
2011-06-23 03:01:30張向明
裝備制造技術(shù) 2011年10期
楊 俠 ,岳 曲 ,張向明 ,郭 釗
(1.武漢工程大學(xué)機(jī)電工程學(xué)院,湖北武漢430073;2.武漢明俠機(jī)電設(shè)備有限公司,湖北武漢430074)
目前抽油機(jī)用電量約占油田總用電量的40%左右,是油田耗能大戶,且油田大量在用抽油機(jī)的主流,仍然是常規(guī)游梁式抽油機(jī)。但游梁式抽油機(jī)有其自身的缺點(diǎn),巨大的驢頭及游梁要求配重相當(dāng)質(zhì)量的平衡塊,使得質(zhì)量劇增,從而直接導(dǎo)致傳動(dòng)能耗大、有效負(fù)載率低、用電成本高、調(diào)整參數(shù)復(fù)雜及一次性投資較多,啟動(dòng)時(shí),不可避免的會(huì)形成大馬拉小車的現(xiàn)象[1]。
為減少能耗,提高經(jīng)濟(jì)效益,近年來(lái)國(guó)內(nèi)外有關(guān)專家研制了許多節(jié)能型抽油機(jī),本文基于自行發(fā)明設(shè)計(jì)提出的新型節(jié)能型抽油機(jī)(專利號(hào):ZL200820191342.6)——四連桿抽油機(jī),理論分析研究其驅(qū)動(dòng)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)規(guī)律,建立了運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)方程,并運(yùn)用計(jì)算機(jī)仿真技術(shù)對(duì)其進(jìn)行實(shí)例驗(yàn)證,充分體現(xiàn)了該機(jī)構(gòu)的可行性及其自身優(yōu)勢(shì)特點(diǎn),對(duì)于減少能耗提高效率具有重大作用,所以對(duì)其進(jìn)行研究分析具有重要的意義。
1 機(jī)構(gòu)模型
1.1 運(yùn)動(dòng)學(xué)分析
驅(qū)動(dòng)機(jī)構(gòu)原理圖如圖1所示。

圖1 驅(qū)動(dòng)機(jī)構(gòu)原理圖
當(dāng)α=0°時(shí),滑塊與四桿機(jī)構(gòu)的連接點(diǎn)B處于上極限位置B1時(shí),相對(duì)應(yīng)的懸點(diǎn)處于下極限位置;當(dāng)α=180°時(shí),B點(diǎn)處于下極限B2,相對(duì)應(yīng)的懸點(diǎn)處于上極限位置。圖1中,
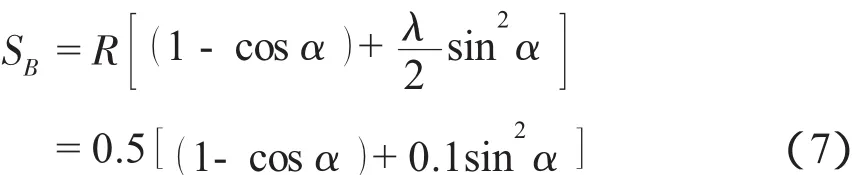
B點(diǎn)沖程SB=2R,取B1點(diǎn)為位移零點(diǎn),向下為位移正方向,則任意曲柄轉(zhuǎn)角α?xí)rB點(diǎn)的位移SB為
由三角形OAD與三角形ABD可得
由三角形OAB得
將上式代入(1)得

上式即為B點(diǎn)位移與曲柄轉(zhuǎn)角α的關(guān)系式。為了便于求得B點(diǎn)的速度及加速度進(jìn)一步簡(jiǎn)化,取其使用上足夠準(zhǔn)確的近似式。將上式所含
按二項(xiàng)式定理展開,取其前兩項(xiàng)可得
于是B點(diǎn)位移簡(jiǎn)化為


B點(diǎn)的加速度為

1.2 動(dòng)力學(xué)分析
(1)滑塊受力分析。滑塊除了受到配重平衡塊的靜載荷,即配重平衡塊的自重G,還受到運(yùn)動(dòng)中變化的沖擊載荷,即可知滑塊B所受的沖擊載荷(連桿末端所受的動(dòng)載荷)公式有
其中,
m為配重平衡塊的凈質(zhì)量;
FB為滑塊運(yùn)動(dòng)過程中的沖擊載荷。
在對(duì)機(jī)構(gòu)運(yùn)動(dòng)學(xué)分析中,可知,

(2)連桿受力分析。在運(yùn)動(dòng)過程中,連桿為拉壓桿,僅受到拉力(或者壓力),而且在連桿兩端A、B均為鉸鏈,中間無(wú)外力作用,因此連桿為二力桿。根據(jù)作用力與反作用力可知,連桿對(duì)滑塊的拉力(壓力)的函數(shù)表達(dá)式如下:
由上面計(jì)算沖擊載荷知FB=Fa,
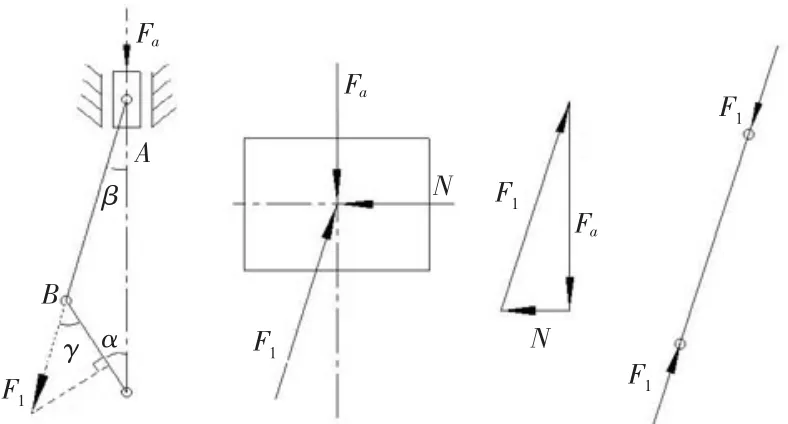
圖2 機(jī)構(gòu)受力分析示意圖
結(jié)合運(yùn)動(dòng)分析,整理上式得到連桿受力

(3)曲柄扭矩理論計(jì)算。再對(duì)連桿與曲柄進(jìn)行受力分析,如圖3所示。
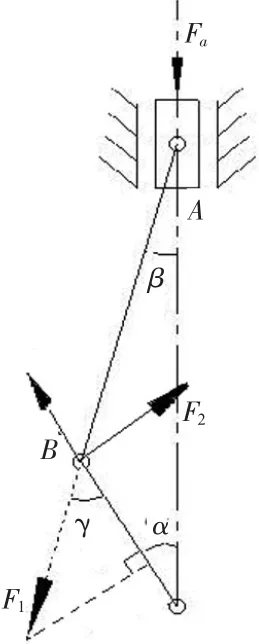
圖3 曲柄受力分析示意圖
如圖3可知,
F2=F1sin γ
γ=α+β
又 M=F2R,所以,

根據(jù)三角函數(shù)之間的換算關(guān)系,有

整理上式可求得扭矩M。
2 計(jì)算機(jī)軟件仿真與實(shí)例驗(yàn)證
2.1 運(yùn)動(dòng)學(xué)驗(yàn)證
現(xiàn)給定目標(biāo)技術(shù)參數(shù):
懸點(diǎn)載荷為80 kN,沖程為2.5 m,沖次為6 min-1。
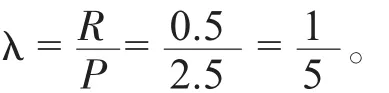
設(shè)定四連桿變形比例結(jié)構(gòu)的比例為2.5;
根據(jù)給定目標(biāo)參數(shù)可知,沖程
S=n×2R=5R=2.5 m得
R=0.5 m,
沖次為6 min-1,說明曲柄在1 min內(nèi)轉(zhuǎn)動(dòng)了6圈,即角速度
ω=0.2π rads,
連桿的長(zhǎng)度初定為2.5 m,則
根據(jù)以上給定參數(shù),初步確定各運(yùn)動(dòng)桿件的尺寸,然后結(jié)合前面的運(yùn)動(dòng)分析,代入各數(shù)據(jù),則可確定驅(qū)動(dòng)機(jī)構(gòu)滑塊B的運(yùn)動(dòng)參數(shù)方程為
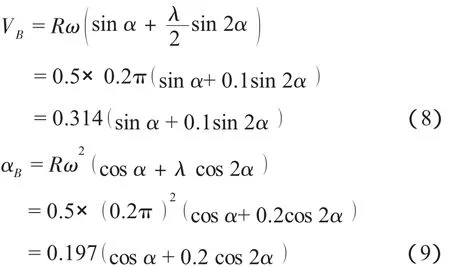
再根據(jù)以上得到的理論計(jì)算運(yùn)動(dòng)參數(shù),作出滑塊一個(gè)周期內(nèi)運(yùn)動(dòng)曲線圖,然后根據(jù)數(shù)據(jù)要求在計(jì)算機(jī)軟件Pro-ENGINEER4.0中對(duì)該型號(hào)的抽油機(jī)驅(qū)動(dòng)機(jī)構(gòu)進(jìn)行運(yùn)動(dòng)仿真,得到的一個(gè)周期內(nèi)的仿真結(jié)果,最后將兩者進(jìn)行比較。其中對(duì)比情況如圖4、圖5、圖6所示。
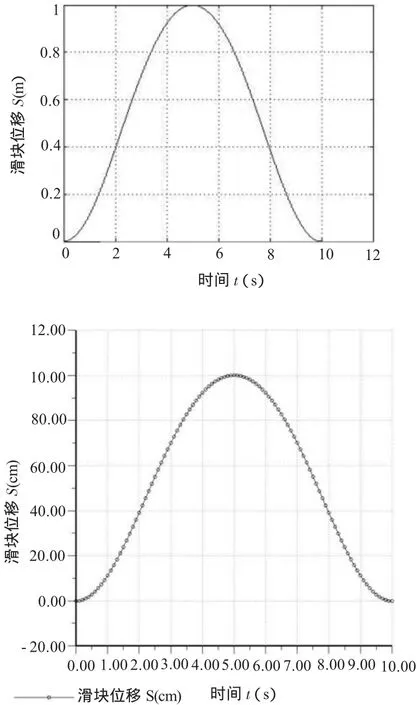
圖4 滑塊一個(gè)周期的位移曲線
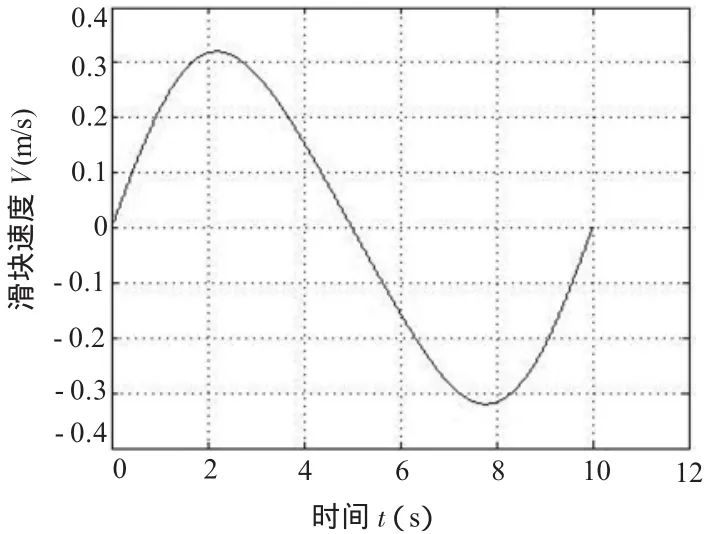
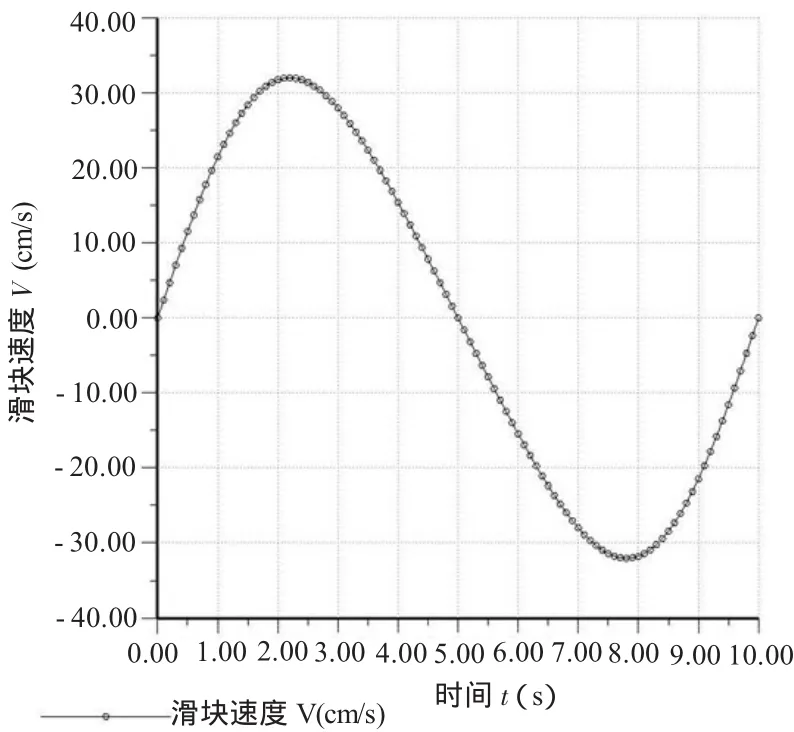
圖5 滑塊一個(gè)周期內(nèi)的速度曲線
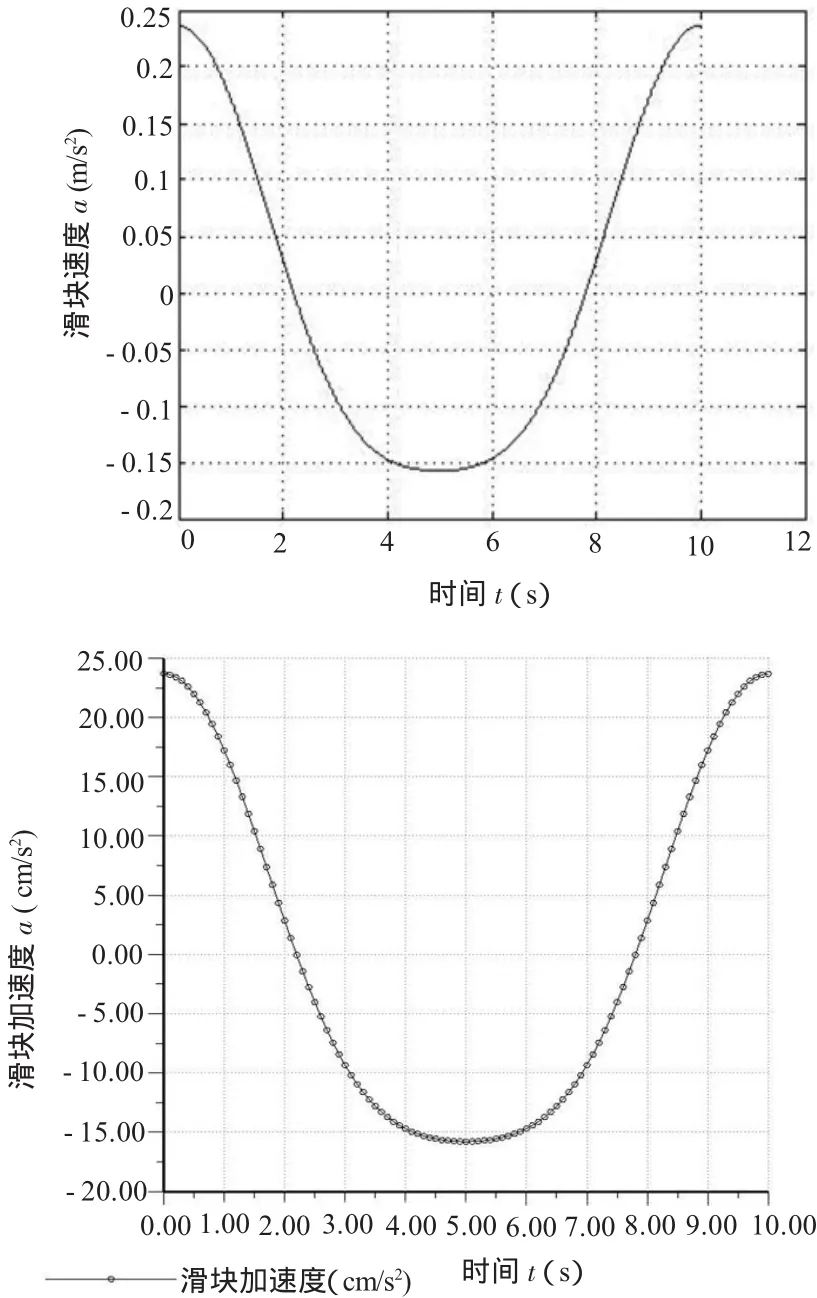
圖6 滑塊一個(gè)周期內(nèi)的加速度
2.2 動(dòng)力學(xué)驗(yàn)證
為避免與2.1重復(fù),另選機(jī)構(gòu)的目標(biāo)參數(shù),其中懸點(diǎn)載荷為120 kN,沖程為3.6 m,沖刺為6 min-1,設(shè)定四連桿變形比例結(jié)構(gòu)的比例為3。
對(duì)動(dòng)力學(xué)驗(yàn)證,本文給定滑塊的載荷變化函數(shù)與曲線圖(如圖7所示),通過對(duì)驅(qū)動(dòng)機(jī)構(gòu)的受力理論分析,確定滑塊的載荷變化,與已知目標(biāo)參數(shù)進(jìn)行對(duì)比,來(lái)驗(yàn)證動(dòng)力學(xué)規(guī)律。其中給定目標(biāo)函數(shù)如下

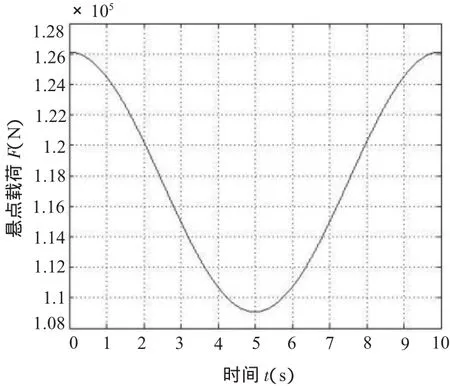
圖7 給定的懸點(diǎn)負(fù)載曲線
由上面的滑塊受力學(xué)分析知

運(yùn)用Matlab繪制出滑塊A沖擊載荷在一個(gè)運(yùn)動(dòng)周期中的變化曲線,如圖8所示。

圖8 滑塊沖擊載荷理論曲線
可知滑塊所受的總載荷

但是由于四連桿變形比例結(jié)構(gòu)的比例為3,且在上述分析過程中我們可知,運(yùn)動(dòng)過程中由于四連桿變形比例機(jī)構(gòu)的機(jī)構(gòu)特性,可知其驅(qū)動(dòng)端與懸點(diǎn)的靜載荷是成正比例關(guān)系,而加速度大小是成反比例關(guān)系的。即根據(jù)這一特性,滑塊所受的總載荷經(jīng)比例換算得出以下函數(shù)

根據(jù)上述表達(dá)式,繪制出換算后的函數(shù)與目標(biāo)函數(shù)在任意周期內(nèi)的變化曲線,如圖9所示。
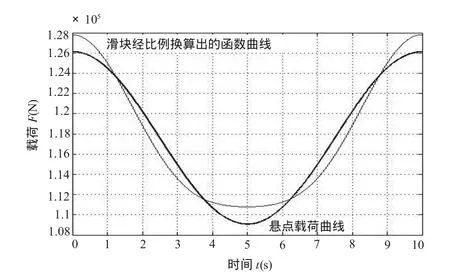
圖9 載荷比較圖
由圖9分析比較可得,在允許誤差范圍內(nèi),所求得的理論曲線與目標(biāo)函數(shù)曲線近似相等。
通過對(duì)仿真得到的結(jié)果進(jìn)行分析,發(fā)現(xiàn)其與理論計(jì)算結(jié)果基本一致。因此,此分析方法是可行的。
3 結(jié)束語(yǔ)
通過對(duì)新型抽油機(jī)驅(qū)動(dòng)機(jī)構(gòu)的運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)分析,并結(jié)合計(jì)算機(jī)仿真技術(shù),結(jié)論表明:新型四連桿抽油機(jī)驅(qū)動(dòng)機(jī)構(gòu)(曲柄滑塊機(jī)構(gòu)),完全可滿足同類型游梁式抽油機(jī)所要求的技術(shù)參數(shù),同時(shí)在此基礎(chǔ)上,考慮到機(jī)械產(chǎn)品性能、質(zhì)量、成本以及經(jīng)濟(jì)效益,四連桿抽油機(jī)驅(qū)動(dòng)機(jī)構(gòu)有其自身優(yōu)勢(shì):
一是面接觸低副,壓強(qiáng)小,便于潤(rùn)滑,磨損輕,壽命長(zhǎng),傳遞動(dòng)力大;
二是低副易于加工,可獲得較高精度,成本低;
三是桿可較長(zhǎng),可用作實(shí)現(xiàn)遠(yuǎn)距離的操縱控制;
四是可利用連桿實(shí)現(xiàn)較復(fù)雜的運(yùn)動(dòng)規(guī)律和運(yùn)動(dòng)軌跡。
[1]常瑞清,劉建春,李春紅,魯明延.常規(guī)抽油機(jī)節(jié)能潛力分析[J].油氣田地面工程,2008,(2):43-44.
[2]彭世警,管祥華,李濱城.六桿推送機(jī)構(gòu)的運(yùn)動(dòng)學(xué)及動(dòng)力學(xué)分析[J].農(nóng)業(yè)裝備與車輛工程,2011,(1):40-43.
[3]魯克明,王 勇.柴油機(jī)曲柄連桿機(jī)構(gòu)沖擊動(dòng)力學(xué)分析[J].海軍工程大學(xué)學(xué)報(bào),2011,(1):84-87.
[4]楊 俠,張向明,羅 燕,向忠祥.四連桿式抽油機(jī)[P].中國(guó):ZL200820191342.6,2009-9-2.
猜你喜歡
石油石化節(jié)能(2022年12期)2022-12-30 04:45:02
設(shè)備管理與維修(2022年21期)2022-12-28 07:35:42
民用飛機(jī)設(shè)計(jì)與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
計(jì)算機(jī)測(cè)量與控制(2017年6期)2017-07-01 16:24:20
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
中國(guó)中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年11期)2014-08-08 13:23:44
中國(guó)煤層氣(2014年6期)2014-08-07 03:07:05
終身教育研究(2014年5期)2014-02-28 01:23:06
河南科技(2014年16期)2014-02-27 14:13:19