高職院校工業機器人課程建設研究*
2011-10-30 00:52:10趙鳳申李愛芹
職業教育研究 2011年3期
趙鳳申 李愛芹
(南通航運職業技術學院 江蘇 南通 226010)
高職院校工業機器人課程建設研究*
趙鳳申 李愛芹
(南通航運職業技術學院 江蘇 南通 226010)
針對高職院校工業機器人課程教學存在的問題,應采用項目化教學法,設置合適的項目,融合理論與實踐知識,以期取得良好的教學效果。
高職院校;工業機器人;課程建設
近年來,工業機器人在企業中的應用日益廣泛,企業對技術人才需求迫切。由于高職院校以培養應用型人才為主,學生的知識基礎、就業導向與本科院校不同,因此必須探索適合高職院校的工業機器人課程教學方案。
課程定位
工業機器人課程應定位于為企業培養能夠完成工業機器人編程、操作、維保的應用型人才。課程應傾向于工業機器人,而非常見的基于單片機和嵌入式系統的移動機器人,或基于PC和多傳感器的競賽機器人;課程應具有明顯的重實踐、輕理論的特征,對工業機器人的理論知識可只做簡單介紹,而對其操作、結構特性則要求學生能夠深入理解,熟練掌握;課程應采用項目化教學模式,項目來源于工業實際案例,并應將相關理論知識融入項目教學過程中,做到實踐與理論相輔相成。
本課程可采用安川SSF2000弧焊工業機器人,配備焊槍、送絲機構、數字焊機、空壓機、真空吸盤、氣動手爪等外圍設備,配套動態模擬軟件MOTOSIM-EG和通訊軟件MOTOCOM-32,并采用北京博創“創意之星”組合式機器人套件輔助工業機器人課程教學。
工業機器人理論知識的分解與取舍
在傳統的工業機器人課程教學中,多注重理論知識講解,由于工業機器人造價高、數量少、維護難等原因,實訓環節所占比重不大。而理論知識繁雜,有坐標變換、矩陣理論、微積分等高等數學的內容,運動規劃、軌跡控制摻雜過多的算法,內容抽象,與企業具體應用脫節,學生學習起來難度大,興趣不高,影響了教學質量。為了既能夠滿足企業要求,又能使學生有一定的理論知識和發展后勁,應將理論知識分解并融入項目教學過程中。具體而言,可將工業機器人認知、結構、電氣控制、正運動學、示教理論、編程、維保等知識滲透到項目教學中,而對電機運動控制、路徑規劃、逆運動學、虛擬示教、離線編程只做簡單介紹。
項目化課程設計
結合工業機器人的企業應用狀況,設計項目如圖1所示。下面對項目做詳細介紹。
工業機器人認知 學生對機器人的認知比較片面,大多停留于人形機器人、智能機器人層面,缺乏對工業機器人的多種結構形式和各種應用場合的了解。本項目通過視頻、圖像、實訓設備等,使學生了解工業機器人、深海機器人、空間機器人、軍事機器人、仿生及人形機器人、娛樂與服務機器人等在各種場合的應用。對于機器人的工業應用著重講解其各種結構形式及應用場合,如SCARA結構、PUMA560結構、直角坐標機器人等,通過該項目使學生對機器人學科有全面認識,提高學生的學習興趣。
工業機器人的基本操作 本項目由學生操作示教盒在不同坐標系下運轉工業機器人,并在動態模擬軟件MOTOSIM-EG中完成虛擬機器人的加載和控制。通過關機坐標系下的運動使學生了解PUMA560機器人的結構形式,通過直角坐標系了解軌跡控制的概念,并簡要介紹用戶坐標系和工具坐標系的實用意義。教師簡單講解工業機器人的系統構成、各部分原理和作用,如控制柜(主控制器、軸控制器、焊接控制板、變頻器、IO板等)、數字焊機、氣罐、送絲結構、交流伺服電機等,并可講解弧焊、點焊、釬焊的差異及其應用。
汽車車門點焊實訓 本項目由學生編制程序,驅動工業機器人模擬點焊作業。由于點焊設備較重,對機器人負載能力的要求較高(一般在165kg級別),使得機器人造價高,不適合高職院校使用。本項目采用弧焊機器人加外部IO模擬點焊操作,并使用動態模擬軟件加載虛擬點焊槍模擬點焊過程。本項目涉及的知識點為:工業機器人的程序錄入與示教再現方法、點焊原理及其應用、外部IO的連接與控制、點位運動模式下的路徑規劃方法等。
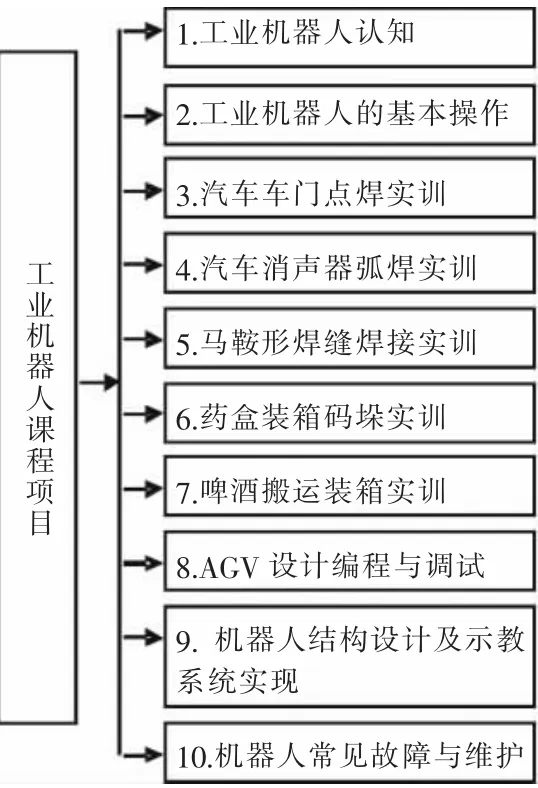
圖1 課程項目圖
汽車消聲器弧焊實訓 本項目由學生設定合適的焊接參數(電流、電壓等),使用起弧、收弧和圓弧運動指令,完成汽車消聲器兩端的正圓形焊縫的焊接。通過本項目使學生對工業機器人的實際焊接過程有親身體會,在焊接過程中教師應做好安全防護工作。涉及的知識點為:圓弧運動命令模式下的路徑規劃、正逆運動學、弧焊原理、焊接參數對焊接質量的影響等。
馬鞍形焊縫焊接實訓 馬鞍形焊縫多出現在圓管與圓管“T”字形連接接口,在壓力容器等設備中比較常見。其特點為大厚度、深坡口,需要多層多道連續焊接,多采用焊接專機或機器人加外部軸的方式進行。由于本實訓室機器人未配備外部軸,故可采用近似方法,即在焊縫上設置若干關鍵點作為運動目標點,使用機器人點位運動或直線運動命令做近似的軌跡擬合,由于關鍵點間距較小,加之弧焊對精度要求不高,本方法基本能夠滿足企業應用要求,并可使用動態模擬軟件加載虛擬機器人和外部軸完成作業。通過本項目使學生了解焊接專機和外部軸的應用場合,了解多軸控制器的作用,提高編程能力,熟練掌握工業機器人操作方法。
藥盒裝箱碼垛實訓 本項目要求學生使用真空吸盤將藥片(由塑料塊模擬)裝入包裝盒,裝滿后將藥盒放至相應位置,然后繼續裝藥操作。本項目程序比較復雜,需要使用外部IO擴展、子程序調用、系統變量等要素,有一定的綜合性。相關知識點為:真空吸盤原理和使用、外部IO擴展和控制、機器人在食品包裝行業的應用等。
啤酒裝箱搬運實訓 本項目主要是將空啤酒瓶裝箱后搬運,需要氣動手爪和真空吸盤配合使用,手爪完成裝箱,真空吸盤完成搬運。本項目在編程上比上個項目偏難,基本知識點與上個項目相同。通過本項目強化學生編制復雜程序的能力。
AGV設計編程與調試 AGV(自動導引車)系統作為柔性裝配系統、物流自動化系統,可適應現代汽車制造業柔性化、敏捷化、智能化、信息化的發展趨勢,工業機器人在汽車生產中主要完成點焊、弧焊、裝配、噴涂等工作,AGV和工業機器人相結合,可大大提高勞動生產率。學生使用組合式機器人套件,選用相應的傳感器,自主設計四輪移動小車,如圖2所示,使用C語言或者圖形化編程軟件完成程序設計,使得小車能夠沿著指定路徑前進,實現自動導引功能。本項目使學生了解AGV的原理和應用,組裝AGV以提高動手能力,通過對小車編程了解單片機開發流程,培養使用C語言編制復雜程序的能力,了解傳感器的原理及與主控制器的連接方法,掌握直流電動機的調速方法。
機器人結構設計及示教系統實現 一般而言,工業機器人是一個封閉的系統,用戶只能通過示教盒或PC機軟件完成工業機器人的編程控制,其D-H參數也不公開。因此,僅依靠工業機器人無法驗證正逆運動學、電機控制理論。為克服此難點,本項目要求學生使用組合式機器人套件設計PUMA560結構形式的機器人,如圖3所示,利用主控制編程實現示教盒功能,即能夠控制該機器人的關節運動,并能夠記錄和復現運動軌跡。該機器人的關節由開放通訊協議的舵機驅動,主控制器能夠與舵機雙向通訊,設定或獲得關節角度。由于該套件可提供各構件的三維模型,學生可以導入UG、Pro/E完成虛擬裝配,通過運動仿真了解工業機器人的正運動學理論。通過該項目使學生深刻理解PUMA560形式機器人的結構,了解工業機器人離線編程、虛擬示教與示教盒示教的區別和聯系,掌握使用C語言編制復雜程序的過程,掌握舵機的原理和控制方法,能熟練地使用UG、Pro/E,教師能夠通過該開放式機器人講解正逆運動學并由學生驗證。
圖2 AGV小車圖
機器人常見故障與維護 本項目主要講述工業機器人常見故障處理,如碰撞、線纜損壞、焊接異常等,常規維護如防塵、防潮、防靜電,末端執行機構、夾具、焊槍等的換裝,加注潤滑油的方法等。由于工業機器人數量有限,本項目主要由教師通過圖片、視頻等方式講解,學生在教師的指導下進行拆裝。此外,還應強調規范化的故障診斷和排除流程。
教學方案與成績評價
本課程采用項目教學法,每組安排4~6人,考慮到工業機器人數量有限,程序錄入占用時間較長,可采取以下方式:(1)利用虛擬機器人與實體機器人互補,一部分學生操作實體機器人,一部分學生利用模擬軟件操作虛擬機器人;(2)組合機器人與工業機器人互補,項目順序不必拘泥于圖1所示,如一部分學生可先進行項目8和項目9,利用組合式教學機器人即可完成教學。
學生完成本項目課程后,能夠掌握工業機器人操作、編程、維保技能,熟悉工業機器人及相關設備在自動化生產中的應用,了解相關理論知識,即可認為實現了教學目標。在教學過程中,應注意過程評價,主要著眼點為動手能力、團隊協作能力、創新能力、紀律性及職業素質,在課程結束后,可由學生選擇某一項目提交研究性報告,以考查其綜合應用知識的能力和文書寫作能力。
教學實踐證明,本課程采用項目教學法,緊貼企業應用,淡化理論,強化實踐,并使二者有機結合于項目中,取得了良好的教學效果。尤其是引入組合式教學機器人,可以彌補工業機器人封閉性的不足,增強學生的參與性,使得課堂教學生動活潑,寓理論于實踐,對工業機器人課程教學具有很好的促進作用。
[1]段鐵群,石廣遠,于丹,楊克飛.重型壓力容器馬鞍形焊縫自動焊機插補算法與仿真[J].焊接學報,2010,31(1):63-66.
[2]郭云緋,劉俏,楊如正.AGV系統大幅提高汽車行業技術水平[J].物流技術與應用,2009,(7):92-94.
[3]戴光平.焊接機器人故障診斷及維修技術[J].電焊機,2003,33(6):51-54.
G712
A
1672-5727(2011)03-0039-02
趙鳳申(1982—),男,河南商水人,碩士,江蘇省南通航運職業技術學院講師,研究方向為應用電子技術、機器人技術與教學。
圖3 組合式工業機器人圖
猜你喜歡
內蒙古教育(2021年20期)2021-03-08 01:09:14
甘肅教育(2020年14期)2020-09-11 07:57:50
計算機教育(2020年5期)2020-07-24 08:53:38
家庭影院技術(2019年11期)2019-12-09 09:14:30
作文世界(小學版)(2018年4期)2018-10-16 17:13:34
東方教育(2017年19期)2017-12-05 15:14:48
唐山文學(2016年2期)2017-01-15 14:03:59
快樂作文·低年級(2016年12期)2017-01-03 20:52:44
快樂作文·低年級(2016年6期)2016-06-24 18:58:40
體育師友(2013年6期)2013-03-11 18:52:18
