微型涵道飛行器飛行力學模型研究
2012-03-03 06:15:48蔡紅明昂海松鄧雙厚張華靚
飛行力學 2012年3期
蔡紅明,昂海松,鄧雙厚,張華靚
(南京航空航天大學航空宇航學院,江蘇南京 210016)
引言
涵道飛行器具有安全性高、結構緊湊、噪聲低的優點。在同樣的功率消耗下,涵道飛行器較同樣直徑的孤立風扇會產生更大的拉力。近年來,在廣闊的應用前景刺激下,涵道飛行器已經成為一個國際性 的 研 究 熱 點,如 美 國 的 Cypher[1],ISTAR[2],GTSpy[3]等,其中有的已經試飛成功并裝備部隊,國內的相關研究也開始起步[4]。
微型涵道飛行器的大包線飛行使得其空氣動力學非線性特性十分顯著。本文利用低雷諾數風洞實驗分析了微型涵道飛行器的氣動特性,并采用CFD數值模擬方法計算了微型涵道飛行器的動阻尼導數,進而建立了微型涵道飛行器的空氣動力學模型以及六自由度飛行力學模型,最后計算了它的基本飛行性能和配平曲線。
1 低雷諾數風洞實驗
1.1 實驗模型介紹
圖1為南京航空航天大學研制的微型涵道飛行器,它能夠完成懸停、傾轉和前飛的大包線飛行。但是由于小尺寸和低速度特性,其具有顯著的低雷諾數效應,機翼失速迎角較低。涵道由于受風扇吸流的影響,失速迎角較高,涵道升力在懸停及傾轉過程中占升力比重較大[5],風扇在懸停和低速前飛時提供升力,對轉風扇相互抵消扭矩。
以微型涵道飛行器為研究對象,通過低雷諾數風洞實驗,研究它在不同狀態參數下的空氣動力學特性,在整個實驗過程中,都采用全尺寸模型。該微型涵道飛行器的主要參數如下:涵道直徑0.13 m;涵道弦長0.25 m;機翼展長0.5 m;機翼弦長0.09 m;飛行器質量0.5 kg;巡航速度14 m/s。該MAV的涵道外壁上布置了兩個對稱機翼,在以飛機模式快速前飛時能提供足夠的升力,保證良好的前飛性能。涵道出口安裝有方向舵和一對差動舵面,由于各舵面作用在風扇尾流中,因而它們都有較高的氣動效率。涵道飛行器的縱向運動由差動舵面同步運動來控制,涵道飛行器的橫航向運動則由方向舵和差動舵面差動運動來控制。
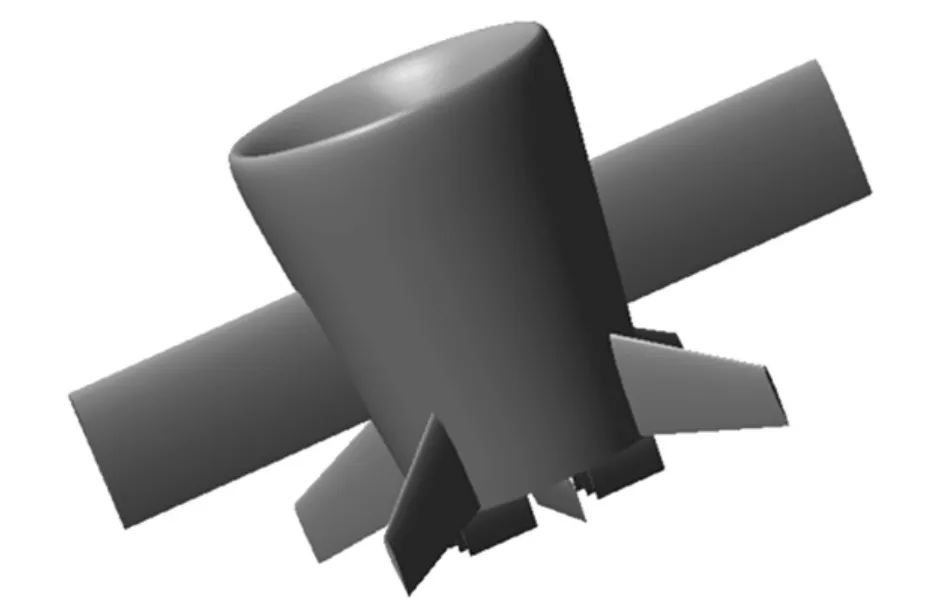
圖1 自研的微型涵道飛行器
1.2 風洞介紹
微型涵道飛行器具有尺寸小、低飛行速度的特征,它的雷諾數在50 000左右。風洞實驗采用開口回流式低速風洞,涵道飛行器在開口段吹風,該開口段的主要技術數據見表1。微型涵道飛行器在風洞中的安裝情況如圖2所示。

表1 低雷諾數實驗風洞數據表
圖2 在風洞中安裝情況
1.3 風洞實驗結果分析
本文采用最小二乘法對微型涵道飛行器低雷諾數風洞實驗數據進行處理。圖3給出了風速4 m/s情況下不同狀態的氣動力和氣動力矩隨迎角的變化曲線(圖3(a)的風扇轉速為12 500 r/min和15 000 r/min,升力、阻力指飛行器從飛機模式水平飛行至直升機模式懸停狀態的結果;圖3(b)的風扇轉速為12 500 r/min)。
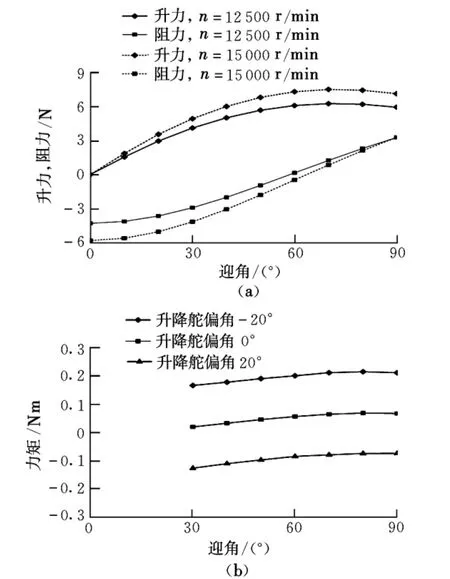
圖3 氣動力和氣動力矩隨迎角變化曲線
由圖3(a)可以發現,涵道產生的升力分量的最大升力不是產生在懸停狀態,而是在70°迎角附近。升力曲線在最大升力點后未出現突然跳躍,說明該涵道飛行器具有良好的失速特性。由圖3(b)可以發現,升降舵有足夠的操縱權限來配平和改變飛行器的飛行狀態。
2 動阻尼導數計算
動阻尼導數對微型涵道飛行器飛行動力學特性具有非常重要的影響。動導數獲取手段有數值模擬[6-7]、風洞實驗[8-9]和理論計算[10]。由于經費限制,未進行動導數風洞實驗。理論計算效率較高,但精度較差。本文在非結構網格技術基礎上,采用二階精度的中心有限體積法和全隱式雙時間推進方法進行非定常歐拉方程求解。
本文研究的微型涵道飛行器的流場有較大的運動幅度,采用嵌套網格技術把流場適當地劃分為兩個具有重疊部分的區域,各個區域分別生成獨立的網格并在其上求解,在重疊區上通過網格間插值進行區域間信息交換。圖4為微型涵道飛行器嵌套后的網格。
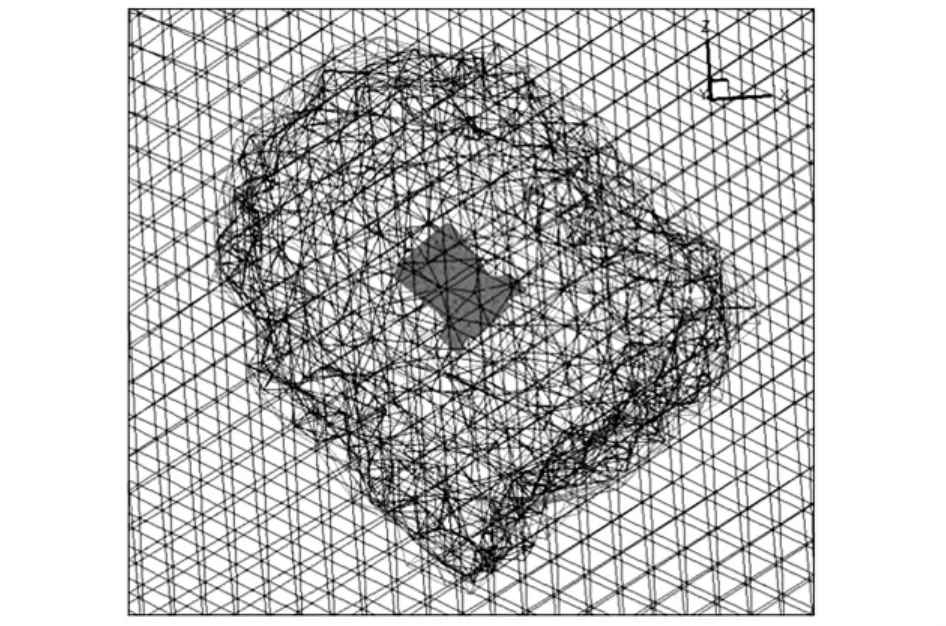
圖4 微型涵道飛行器嵌套后的網格
采用強迫運動的方法求出微型涵道飛行器的俯仰穩定性參數。具體做法是采用強迫振動法提供動態氣動力系數的時間歷程曲線和遲滯曲線。圖5為Ma=0.03時涵道飛行器俯仰力矩系數隨迎角變化的遲滯曲線。由于局部時間步長、隱式殘差光順等加速收斂方法的使用,氣動力從第三個周期已經收斂,得到周期解。再通過積分就可以求得動阻尼導數,具體過程見文獻[6]。
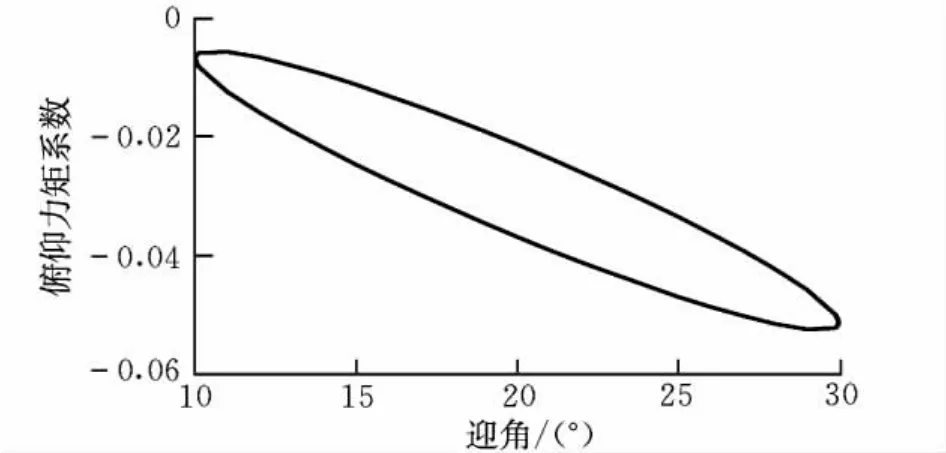
圖5 俯仰力矩系數隨迎角變化的遲滯曲線
3 飛行力學模型研究
3.1 歐拉方程
微型涵道飛行器的飛行力學模型由運動學方程、動力學方程、大氣模型和空氣動力學模型組成。在構建微型涵道飛行器的運動學方程模型時,分別采用航跡坐標系下的質心運動方程和機體坐標系下的旋轉運動方程:
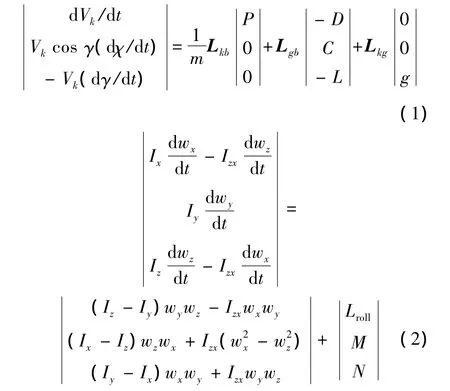
式中,Vk為飛行速度;γ,χ分別為航跡傾斜角和航跡方位角;P為風扇拉力;D,C,L與 Lroll,M,N 分別為氣動力與氣動力矩。
3.2 飛行力學仿真模型
由前面建立的飛行力學模型,應用商業計算軟件Matlab/Simulink建立微型涵道飛行器的飛行力學仿真模型如圖6所示。
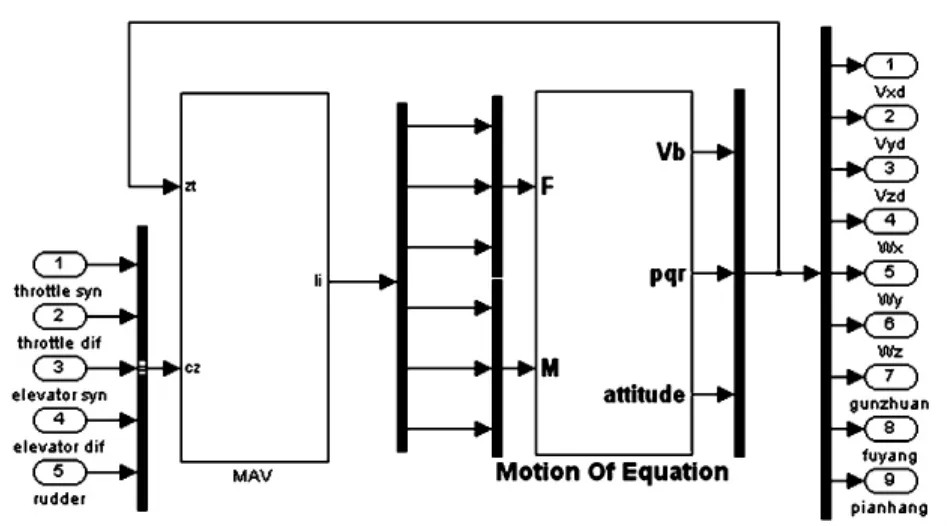
圖6 飛行力學仿真模型
3.3 基本飛行性能
3.3.1 懸停時的飛行性能
把低雷諾數風洞實驗無風狀態時實測的數據進行最小二乘法擬合,計算出懸停時對轉風扇的轉速為12 400 r/min。
3.3.2 直升機模式的飛行性能
把低雷諾數風洞實驗有風狀態時實測的數據進行最小二乘法擬合,計算出直升機模式的最大飛行速度為2 m/s。
3.3.3 飛機模式的飛行性能
把低雷諾數風洞實驗有風狀態時實測的數據進行最小二乘法擬合,計算出飛機模式的最小飛行速度為10 m/s。
3.4 配平計算結果分析
把微型涵道飛行器的基本參數輸入到前面建立的飛行力學仿真模型中,用Matlab/Simulink仿真環境對微型涵道飛行器進行計算。
圖7為微型涵道飛行器從懸停狀態到直升機模式小速度前飛,再到飛機模式大速度前飛的配平結果。該微型涵道飛行器直升機模式的最大速度明顯小于飛機模式的最小速度,滿足安全模式轉化要求。懸停時,風扇和涵道產生升力,微型涵道飛行器的風扇轉速較大,升降舵偏角為0°。隨著前飛速度的增大,微型涵道飛行器向前傾轉,風扇轉速減小,升降舵偏角增大。隨著前飛速度的進一步增大,微型涵道飛行器進一步向前傾轉,風扇轉速增大,升級舵偏角減小。
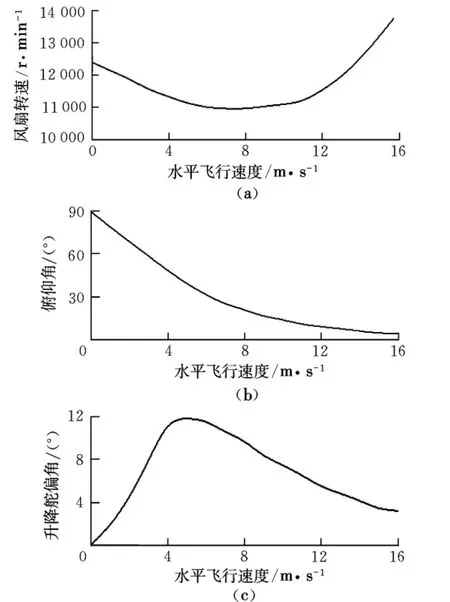
圖7 微型涵道飛行器配平結果
4 結論
(1)微型涵道飛行器傾轉是在直升機模式有一定的前飛速度下開始的。以直升機模式前飛時,隨著前飛速度增加,風扇轉速減小,俯仰角減小,升降舵偏角增大。
(2)在傾轉過程中,涵道產生較大升力,傾轉到迎角70°時,總升力達到最大值。隨著前飛速度增加,風扇轉速先減小后增大,俯仰角繼續減小,升降舵偏角先增大后減小。
(3)微型涵道飛行器轉入飛機模式前飛時,機翼產生大部分升力,風扇和涵道產生拉力。隨著前飛速度增大,風扇轉速增大,俯仰角繼續減小,升降舵偏角減小。
(4)該微型涵道飛行器可以完成懸停、傾轉和前飛的大包線飛行。
[1] Murphy D W,Bott J P,Bryan W D,et al.MSSMP:no place to hide[C]//Proceedings AUVSI.Baltimore,MD,1997:281-290.
[2] Ko A,Ohanian O J,Gelhausen P.Ducted fan UAVmodeling and simulation in preliminary design[C]//AIAA Modeling and Simulation Technologies Conferences and Exhibit.Hilton Head,South Carolina,2007:1-19.
[3] Eric N J,Michael A T.Modeling,control,and flight testing of a small ducted-fan aircraft[J].Journal of Guidance,Control,and Dynamics,2006,29(4):769-779.
[4] 李建波,高正,唐正飛,等.涵道風扇升力系統的升阻特性試驗研究[J].南京航空航天大學學報,2004,36(2):164-168.
[5] Will E G.Effects of duct lip shaping and various control devices on the hover and forward flight performance of ducted fan UAVs[D].Virginia:Virginia Polytechnic Institute and State University,2005.
[6] 范晶晶,閻超,李躍軍.飛行器大迎角下俯仰靜-動導數的數值計算[J].航空學報,2009,30(10):1846-1850.
[7] Scott M M.Reduced-frequency approach for calculating dynamic derivatives [J].AIAA Journal,2007,45(6):1161-1168.
[8] Frank G M,Roy C S Jr.Dynamic derivatives for missile configurations to Mach number three[J].Journal Spacecraft,1978,15(2):65-66.
[9] Huang Da,Gen Xing-wu.Unsteady rolling moment characteristics for fighter oscillatingwith yawing—rolling coupled motion [J].Journal of Aircraft,2006,43(5):1570-1574.
[10] Zhao Hui-when,Cees B.Aerodynamic design and analysis of a VTOL ducted-fan UAV[C]//26th AIAA Applied Aerodynamics Conference.Honolulu,Hawaii,2008:18-21.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
小獼猴智力畫刊(2022年9期)2022-11-04 02:31:42
中學生數理化·中考版(2022年11期)2022-02-16 07:01:20
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
小哥白尼(趣味科學)(2019年6期)2019-10-10 01:01:50
光學精密工程(2016年6期)2016-11-07 09:07:19
發明與創新(2016年38期)2016-08-22 03:02:52
太空探索(2016年5期)2016-07-12 15:17:55
核科學與工程(2015年4期)2015-09-26 11:59:03
