MACH2控制保護系統冗余性研究及其可用性分析
2012-03-23 08:33:14湖北省電力公司檢修分公司俞曉冬
電子世界 2012年17期
湖北省電力公司檢修分公司 俞曉冬
三峽電力職業技術學院 王麗麗
湖北省電力公司檢修分公司 戴 迪
1.引言
MACH2(Modular advanced control HVDC&SVC 2ndedition)系統稱為超高壓直流以及輸電以及靜態無功補償第二代模塊化高級控制系統,是ABB公司開發的用于輸電工程的一種控制保護系統。MACH2系統是一種基于軟件和硬件的開發平臺,也是一種適用于直流輸電的控制保護系統。MACH2系統采用基于PC的技術方案,其硬件系統以多處理器的工業PC作為主計算機,通過PCI總線擴展高性能外圍設備控制模板構成。該方案具有處理速度高、功能強大和PC系列標準設備易于功能擴展,以及可以得到第三方豐富的資源支持等特點。控制保護系統與現場設備的接口采用光纖介質的CAN、TDM和HDLC等高性能現場總線,使系統具有可靠性高、組態靈活,整個系統表現為基于網絡的分布式結構。軟件采用圖形化編程和調試工具,界面友好、程序可讀性高,修改、調試和維護方便,效率高[1]。系統采用完全冗余配置并具有完備的自檢功能,極大地提高了系統的可靠性和可用率。
本文以三常直流為例詳細介紹三常直流的控制保護系統的分層結構,并以ABB公司的MACH2直流控制保護系統為例,來對直流控制保護系統的冗余性做深入分析,并通過計算得出了這種分層設計的冗余控制保護系統可以顯著的提高直流控制保護系統的可靠性。
2.MACH2 系統冗余性分析
MACH2系統包括冗余的ACP,AFP和PCP主機。對于用CAN和TDM總線相互連接的主機,分布式I/O和子系統,總線均采用冗余配置。下面將分別對這些MACH2系統的冗余特性展開深入探討。
2.1 分布式I/O系統的冗余
冗余的ACP,AFP,或PCP系統的接口是安放在獨立的屏柜內的遠方或分布式I/O系統,這些屏柜按距離和設計要求或靠近相關的主回路設備或在中央控制室里。為了避免任何可能的干擾,設備的不同層場總線連接采用光纜[2]。
分布式I/O系統包括交流場(ACP和AFT)I/O、直流場(DFT)I/O、交流濾波器保護(AFP)I/O、換流變壓器(TFT)I/O、平波電抗器(SRCI)I/O。分布式I/O系統完全冗余,且通過兩個雙重化現場總線連接到上一級層。不同于ACP、AFP或PCP系統,雙重分布式I/O系統總處于運行狀態,即雙通道運行。對I/O系統,所有主回路的測量傳感器這樣連接,即每個I/O系統從獨立的互感器線圈引入測量量。如果只有一個線圈,應將它連接到兩個系統中,確保運行時一個I/O系統的輸入回路出現問題時,不影響其他I/O系統的工作。
I/O的測量通道一直處于被監測中。如果檢測到異常將發出報警,可能的話切換到另一系統(是否切換由故障嚴重程度決定)。
類似于測量通道,對分布式I/O系統,所有進、出開關場的開關量均被聯接到兩個冗余系統中。從主設備出來,兩個I/O系統始終處于運行狀態。例如,到斷路器的跳閘信號,正常時會被兩個系統同時執行。
2.2 分布式子系統的冗余
分布式子系統與分布式I/O系統使用相同的硬件,唯一不同的是子系統有自己的控制或保護功能。控制保護功能被下放到子系統中,就意味著在A、B子系統間必須有自己的切換邏輯和交叉的通訊通道。在這系統層進行切換不會影響其它系統,如PCP系統。
分布式子系統通訊接口原理圖如圖1所示。
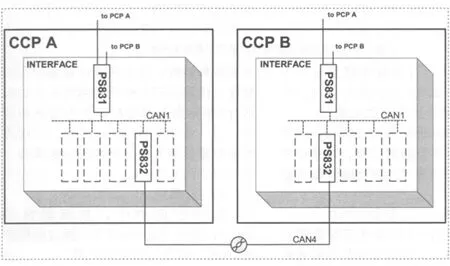
圖1 分布式子系統
由于系統間的距離很短,系統間交叉連接的現場總線采用電氣連接(CAN4)。CAN4是獨立的,并且不出柜體。它與I/O機箱背板的CAN1(和CAN2)電氣隔離。橋的功能在PS832板中用軟件實現。
2.3 CAN總線的冗余
在冗余的PCP,ACP 和AFP系統中,CAN總線被用作I/O控制總線。這些總線彼此間完全隔離。PCP系統總線數據被冗余配置的雙CAN總線處理,見圖2。這種配置中,分布式I/O系統被聯接到各自控制柜[3]。這樣可以實現任何保護動作的雙重跳閘通道。因此,在完成保護啟動的切換后,雙跳閘通道總是有效。切換只在主計算機層產生,分布式I/O系統總處于運行狀態。
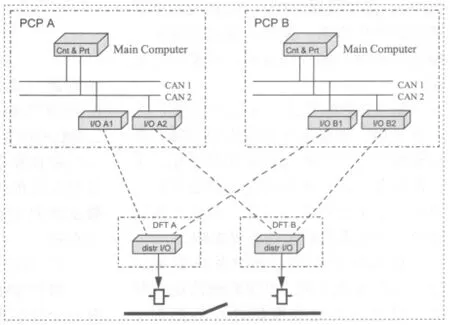
圖2 PCP CAN 網絡配置
在CAN網絡系統中,任何一個應用程序(CAN網絡節點的軟件功能)都能方便地與另一應用程序通訊,只要簡單使用信號發送和接受軟件功能塊。
現場總線的運行情況也受故障監測系統的監視,通過連續的讀寫系統中單獨的節點來發現故障。發現故障時,產生報警并切換到備用系統。
2.4 TDM總線的冗余
MACH2系統中的TDM總線是單向總線類型,用于高速傳輸測量信號。兩個數字處理器的端口按點對點的方式聯接(DSP-DSP聯接)。類似于CAN總線一樣,該總線采用雙重化以實現冗余,見圖3。這里遠方或分布式I/O 的A和B相應連接到A和B柜[4]。
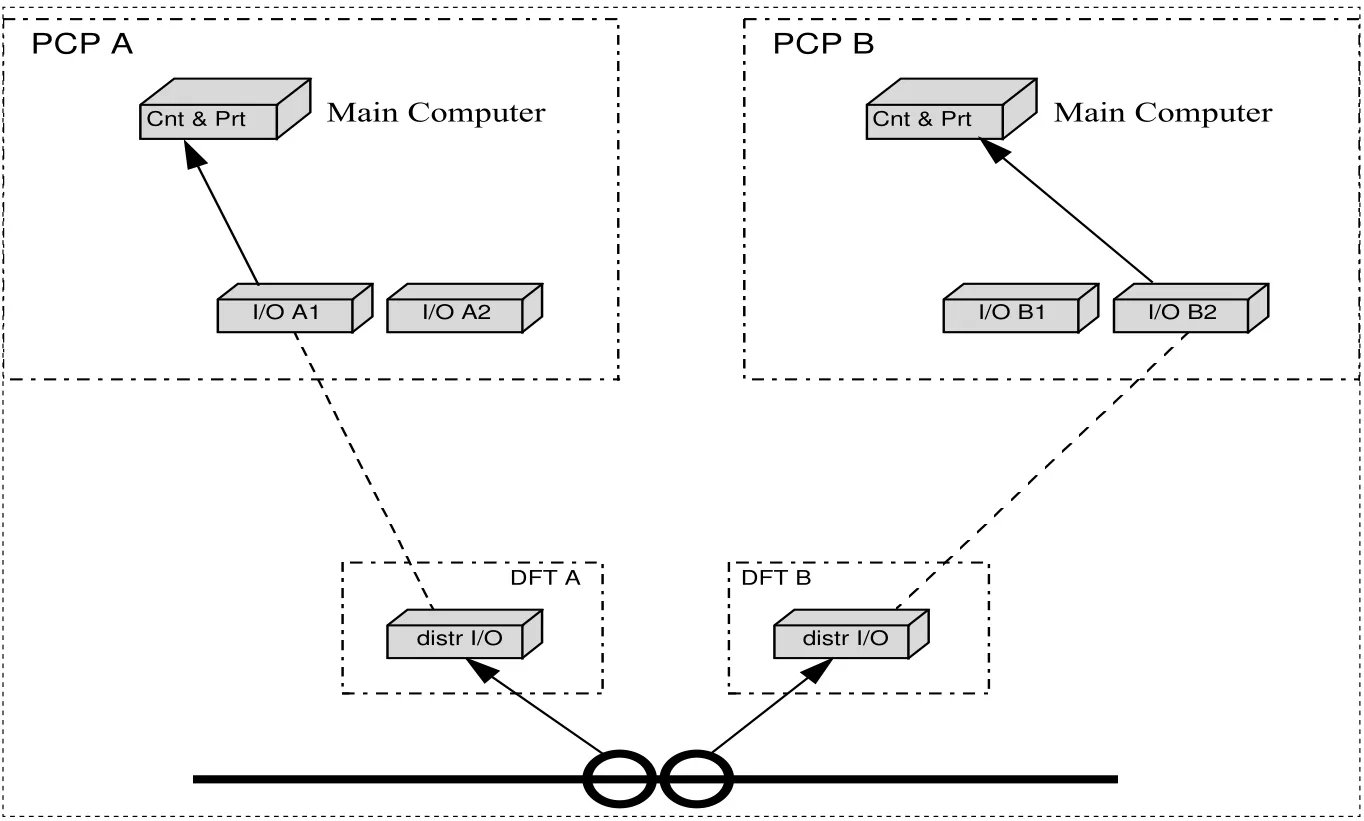
圖3 TDM網絡配置
3.可靠性分析
對MACH2這樣一個復雜的HVDC控制保護系統做出完整的可用性分析是很困難的。為了完成可用性分析,需進行一些假設,這些假設是建立在該領域的大量經驗的基礎上。下面以三常直流為例通過計算來分析MACH2的冗余性配置對系統可靠運行的意義。
3.1 故障模式可用分析
HVDC極控制保護設備可分為三個主要模塊:極控制和保護(PCP柜)、閥控制(VCA,VCB,VCC)、分布式I/O系統(包括雙極相關I/O)。
1)主極控制和保護
極控制和保護A和B是雙重柜。每個PCP有兩個主計算機。控制和保護裝置1(P1),保護裝置2(P2)。P1和P2柜通常啟動切換作為第一操作。濾波器保護、換流變壓器中的一些保護,總是運行狀態。
兩個PCP單元之一在運行狀態,另一個備用。如果運行系統出現故障,備用被切入。每個單元都有切換功能。無公用設備,除了兩單元之間的交叉聯接總線。如果這些總線故障,只失去備用系統,HVDC系統的運行不受影響。
有些保護在兩個PCP系統中都運行,它們獨立于兩個PCP系統的運行狀態。就是說對這些保護之一的測量系統故障,有理論上的誤跳閘風險。這種誤跳幾率從運行實際中得到是小于0.4*10-6f/h,比如,從站運行統計已有2,500,000運行小時無誤跳紀錄[5]。
雙極設備的保護分布在極層,例如包括在P1的保護只跳自己極。就是說雙極保護對該種保護無誤跳風險(如果存在雙極)。
2)閥控制
閥控制位于三個柜中。每個閥組有一個控制單元。控制單元的核心元件被雙重化,且和PCP的切換是統一的。光發送和接收,及一些供電設備無需雙重化,但他們滿足單元故障時不會影響運行(單元指晶閘管和它的光發送和接收,及一些供電設備)。因此,在閥控的非雙重化部分,系統故障的概率按計算可減少到0.05*λ。
3)I/O系統
在控制保護中,直流場終端(DFT),變壓器保護的I/O、濾波器保護的I/O都是雙重化的冗余配置。
4)未被發現的軟件錯誤
盡管采取了種種措施,未被發現的軟件錯誤不可避免。基于運行經驗,并通過計算,可能最大的雙極跳閘概率是在試運行后的第一個三年內出現。軟件錯誤只會發生一次,糾正后不再出現,因此造成的不可用性會逐年遞減。PCP系統未被發現的軟件錯誤而導致強迫停運的概率是0.33次跳閘/每年(37.7*10-6次/小時)。
3.2 計算
下面將根據上面分析的MACH2系統冗余結構來計算出這種冗余結構的可靠性,為了方便計算事先對一些板卡及主機的故障率做出一些合理的假設,建立相應的系統故障數學模型。表1將平均故障時間(MTBF)按回路和工控機的不同類型作出不同假設[6]。

表1 換流站控保設備平均故障時間表
根據表1假設,結合三常直流控制保護主機及I/O板卡的實際配置情況可以大致估算出每種不同設備的故障率,同時假設測量設備故障率是40%,則有表2。
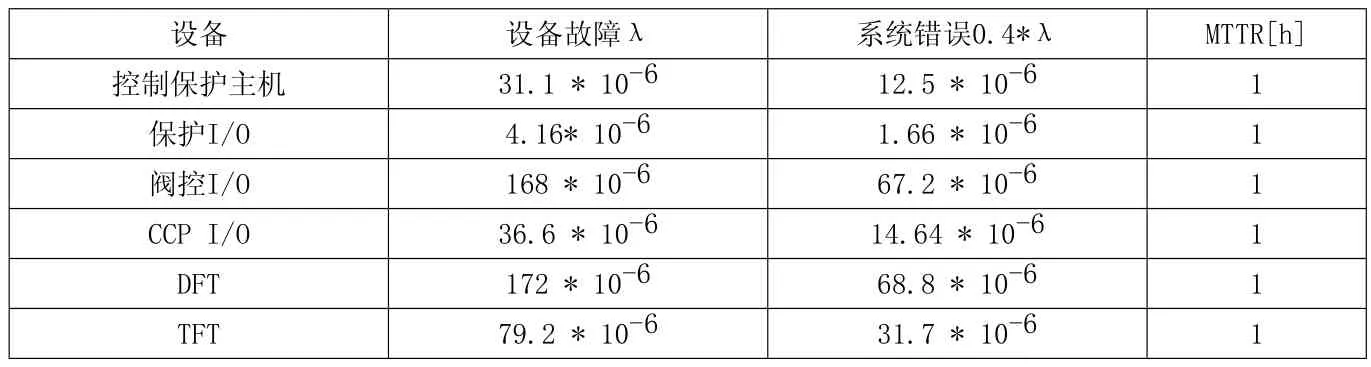
表2 設備故障率
維修時間r=平均維修時間(MTTR)+維護時間=(1+2)h=3小時。
以上便建立了完整的換流站控制保護設備可靠性分析數學模型,根據以上模型下面將分別計算出單系統和冗余系統的可靠性,并做出分析比較。下面將分別以換流變或濾波器保護以及極控制保護為例來進行可靠性計算。
1)換流變保護及濾波器保護可用性分析:
換流站的換流變保護及濾波器保護均配置在保護主機之內,除保護主機內部故障會導致保護不可用外,與保護主機相連的保護I/O板卡及保護主機上運行的軟件發生故障均會導致換流變保護及濾波器保護不可用,圖4為單系統換流變及濾波器保護可用的必備條件框圖。

圖4 單系統換流變及濾波器保護可用條件關系圖
由圖4及表2可以計算出但系統保護的故障率。
λTFP/AFP=λP+λPIO+λUse
=(14.16*10-6)+ (37.7*10-6)
=51.86*10-6(次/小時)= 0.45(次/年)
由故障率與維修時間可以推得單系統保護的年不可用時間為:
λTFP/AFP*r=0.45*3=13.5(小時/年)
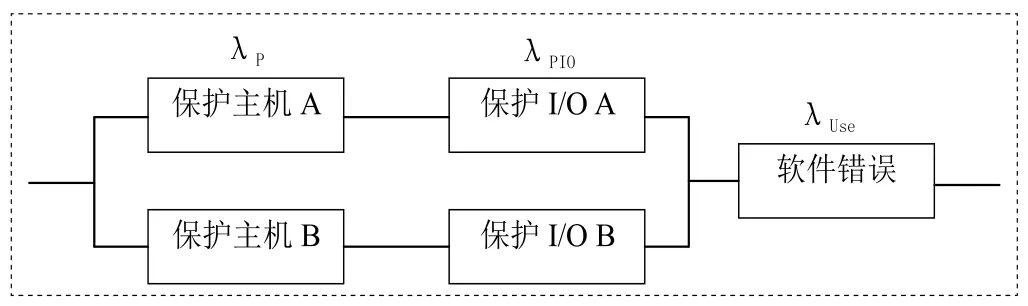
圖5 冗余系統換流變及濾波器保護可用條件關系圖
圖5為雙系統冗余配置的換流變及濾波器保護,由上圖計算出的冗余配置保護的故障率為:
λTFP/AFP=[2*(λP+λPIO)2] +λUse
=(0.0004* 10-6)+(37.7*10-6)
=37.7004*10-6(次/小時)
=0.3302(次/年)
推得雙系統冗余配置的換流變及濾波器保護年不可用時間為:
λTFP/AFP*r=0.3302*3
=0.9906(小時/年)
2)極控制保護、閥控和I/O系統可用性分析:
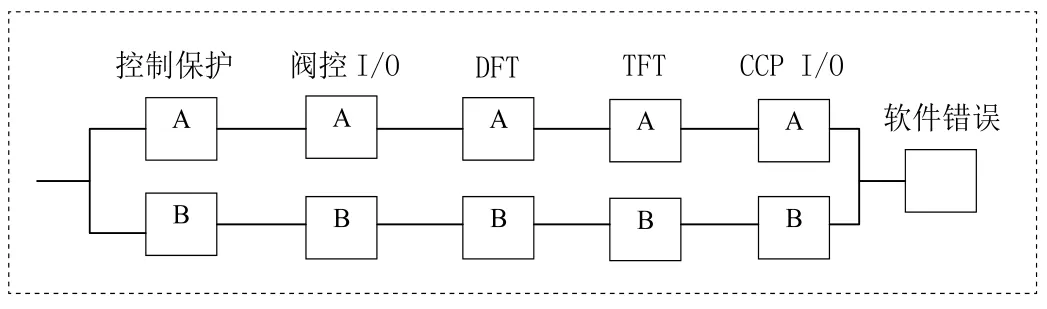
圖6 極控保護閥控及I/O系統可用條件關系圖
圖6是以三常直流控制保護的實際情況畫出的極控保護、閥控及I/O系統可用條件關系圖,通過該圖可以清晰的看到三常直流的控制保護系統是雙重化冗余配置的,根據上圖可以計算出該系統的可用性為:
λC&P=[2*(λC&P+λVCIO+λDFT+λTFT+λCCPIO)2]+λUse
=(0.023*10-6)+(37.7*10-6)
=37.723*10-6(次/小時)
=0.3305(次/年)
其不可用時間為:
λC&P*r=0.3305*3=0.9915(小時/年)
若系統為單系統,即相當于圖9中的B系統不可用則可計算出故障率為:
λC&P=λC&P+λVCIO+λDFT+λTFT+λCCPIO+λUse
=(194.8*10-6)+(37.7*10-6)
=232.5 *10-6(次/小時)
=2.03(次/年)
其不可用時間為:
λC&P*r=2.03*3=6.09(小時/年)
對上面的計算結果進行匯總見表3。
表3可以看出雙系統控制保護相對于單系統控制保護的可靠性有了大幅提高,這對電力系統的穩定運行有著重要意義。
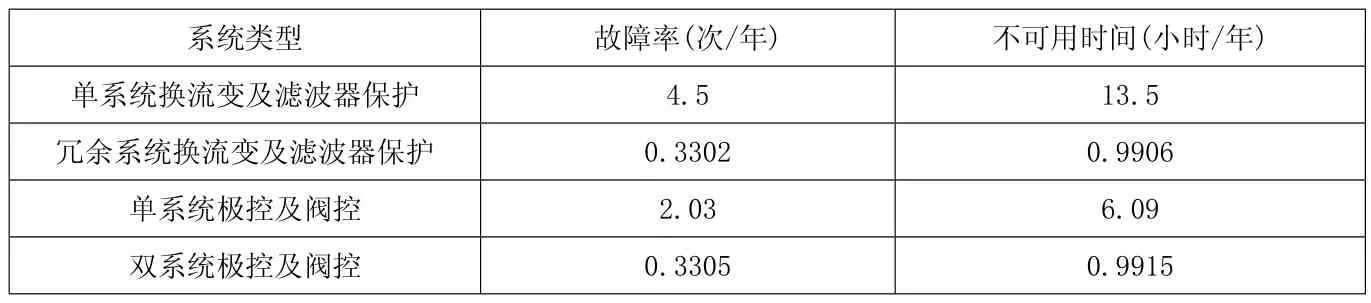
表3 單系統及冗余系統可用率對照表
4.總結與展望
本文對三常直流的控制軟件中的冗余性進行了分析,詳細介紹了整個控制保護系統的分層結構,并通過深入分析和計算證明了冗余系統的可靠性。
由于作者能力和時間有限,文中難免會存在一些不足之處,有待進一步的改進和完善。本文只是對控制保護設備的冗余配置做了簡單的可靠性分析,還有許多工作有待進一步的深入。本文中介紹的控制保護系統僅僅以ABB公司的MACH2系統為例,沒能全面的介紹目前直流系統所采用的控制保護系統,另外,本文沒能更深一步的對MACH2系統做進一步研究,對整個MACH2系統的細節還介紹的不夠全面。因此,研究控制保護軟件的工作還要繼續深入。
[1] 國家電網公司編.三峽-常州±500kV直流輸電工程-換流站[M].中國電力出版社,2004.
[2] K-G Danlelsson.Software Overview Diagram Zhengping Converter Station[E].ABB Group.2001.
[3] K-G Danlelsson.CAN Bus Overview Diagram Zhengping Converter Station[E].ABB Group.2001.
[4] K-G Danlelsson.TDM Bus Overview Diagram Zhengping Converter Station[E].ABB Group.2001.
[5] 任震,武娟,陳麗芳.高壓直流輸電可靠性性評估的等效模型[J].電力系統自動化,1999(09).
[6] 陳永進,任震,梁振升等.高壓直流輸電系統可靠性評估的容量模型研究[J].電網技術,2005,29(10).
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
電子制作(2018年11期)2018-08-04 03:26:08
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
工業設計(2016年12期)2016-04-16 02:52:00
汽車維修與保養(2015年6期)2015-04-17 03:31:50