基于反電勢直接檢測法的無刷直流電動機控制系統(tǒng)
2012-06-19 09:10:26李文生
微特電機 2012年6期
呂 燚,李文生
(電子科技大學,廣東中山528402)
0 引 言
無刷直流電動機(BLDCM用電子換相代替了電刷和換向器,具有直流電動機良好的調速性能,但又沒有機械換向器的不足,高速性能、工作壽命以及可靠性大大提升,在工業(yè)、醫(yī)療以及辦公自動化等領域應用日趨廣泛。BLDCM電子換相是否精準直接影響電機的性能,電子換相的依據(jù)是轉子位置是否過零點。目前檢測電機轉子位置的方法有兩種:一種是通過在轉子上加裝霍爾傳感器來檢測轉子位置,加裝霍爾傳感器會帶來成本上升、小型電機加工難度大等弊端,此外傳感器自身對溫度比較敏感,也大大限制其應用場合;另一種檢測轉子位置的方法無需位置傳感器,包括反電勢法、電感法、狀態(tài)觀測器法、磁鏈計算法和人工神經(jīng)網(wǎng)絡法等幾大類。實際工程中,反電勢法由于其計算量小、結構簡單等優(yōu)點應用最為廣泛。
BLDCM通過PWM信號來調節(jié)轉速,伴隨著功率管的導通和關斷,在空閑繞組反電勢上存在大量的高頻噪聲信號,傳統(tǒng)的檢測方法是采用模擬低通濾波器濾掉高頻噪聲,然后與零點電壓比較來確定換向時刻。模擬濾波器由于會帶來一定的相位滯后,而且該相位滯后量既與電機轉速有關,還與電機的機械特性相關,因而無法通過軟件精確補償,導致?lián)Q向時刻檢測不精準,電機運行效率低,尤其不適合高速運行的場合。本文采用了直接反電勢檢測的方法,無需低通濾波器,相對傳統(tǒng)檢測方法具有換向準確,電機運行高效平穩(wěn)等優(yōu)點,適合高速運行場合。
如何簡單、準確地對反電動勢進行直接檢測,很多學者對此進行了研究。文獻[1-2]提出了在PWM導通期間測量,但是仍然重構了電機中心點,為了濾除中心點的開關噪聲采用了模擬濾波器,相位滯后無法避免,也無法進行軟件補償;文獻[3-4]中電路只能在PWM關斷期間起作用,這使得PWM的占空比必須被限制在一定范圍內;文獻[5]中采用在PWM ON期間采集反電勢的方法,但由于占空比較低時大部分時間無法檢測反電勢,直接過零檢測誤差較大,該系統(tǒng)采用硬件比較器判別過零點,因而也無法有效地補償檢測誤差。
1 無刷直流電動機控制系統(tǒng)
本控制系統(tǒng)的結構示意圖如圖1所示,三相逆變電路上下橋臂都為NMOS管的結構,電機工作電壓36 V,通過電荷泵升壓得到48 V作為上橋臂NMOS柵極驅動電壓;系統(tǒng)控制核心采用嵌入式處理器 STM32F103RBT6,工作主頻 72 MHz,其 ADC采樣率達到1 MSPS;采用TIM1輸出PWM信號驅動三相逆變電路,利用處理器的片內高速ADC采集各相繞組反電勢,并通過軟件對過零檢測誤差進行了補償,實現(xiàn)了電機的精確換相、轉速計算以及閉環(huán)速度控制等功能。
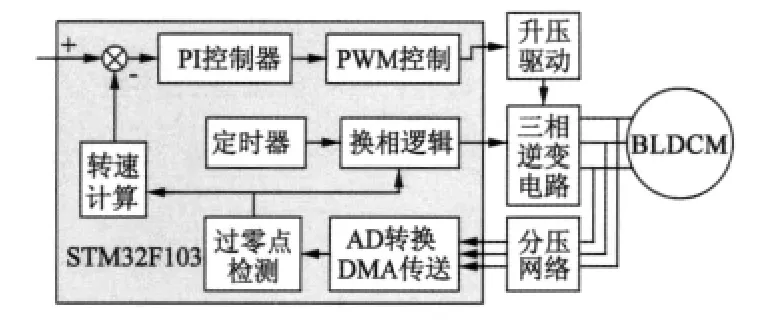
圖1 BLDCM控制系統(tǒng)總體結構示意圖
BLDCM的三相繞組采用星形接法,運行過程中每相繞組導通120°電角度,同一時刻只有兩相繞組通電,另一相空閑,呈現(xiàn)梯形波反電勢和方波電流的特征,其理想波形如圖2所示。為產(chǎn)生恒定、平穩(wěn)的電磁轉矩,換相動作必須和轉子位置保持一致,外在特征表現(xiàn)為方波電流應和梯形波反電勢相位保持一致,位于梯形波反電動勢的平頂寬度范圍內。直接反電勢檢測法是通過檢測空閑繞組反電勢,判別其過零時刻,然后再延時30°電角度后進行換相。
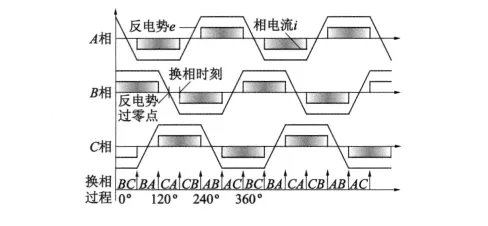
圖2 BLDCM繞組反電勢及電流波形圖
2 直接反電勢檢測原理
圖3為BLDCM控制系統(tǒng)簡化模型圖。T1和T4柵極同時進行PWM調制,PWM ON期間,A、B兩相繞組得電,PWM OFF期間,T2和T3的續(xù)流二極管續(xù)流導通,C相為空閑繞組。在PWM ON期間,由T1、T4、A、B 相繞組回路可得:
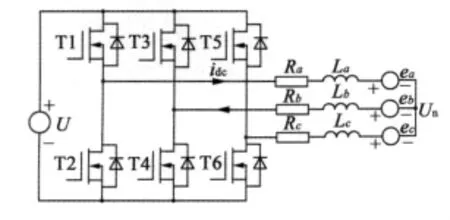
圖3 BLDCM控制系統(tǒng)簡化模型圖
假設MOS管導通壓降相等,記作UT,電機繞組的電阻和電感相等,分別記作R和L,可得:

對繞組A可得:

忽略電機氣隙的變化,可以近似認為:當T1、T4導通時,ea=-eb=E,由式(2)和式(3)可得:

PWM ON期間,C相空閑繞組無電流,其端電壓:
由圖2可知,在T1、T4的調制周期內,C相的反電勢ec逐漸減小,在UC減小過程中當與UN相等的時刻便是電機過零時刻,然后在此基礎上延時30°電角度便可執(zhí)行換相。
導通繞組采用PWM方式調制,因而空閑繞組反電勢呈現(xiàn)如圖4所示的波形。如果空閑繞組的反電勢只能在PWM ON期間檢測,圖4的第一種情況,反電勢過零的時候剛好落在PWM ON期間內,此時通過硬件比較電路便可以準確檢測到過零時刻;但如果是圖4的第二種情況,反電勢過零發(fā)生在PWM OFF期間,等到下一次PWM ON時反電勢已經(jīng)低于,再通過硬件比較電路判別反電勢過零點,則與實際過零點存在較大偏差。理論上可以通過提高PWM信號的頻率來降低上述誤差,但是實際應用中PWM信號的頻率往往受到驅動電路驅動能力、MOS管柵極電容以及MOS管功耗等因素的限制。本文提出的直接反電勢檢測方法綜合運用處理器片內的ADC、定時器和DMA,在PWM ON期間采用DMA的方式快速獲取反電勢電壓的AD轉換結果和每次AD采集的時間,采用ADC的模擬看門狗功能監(jiān)控反電勢何時穿越,然后在中斷服務程序中根據(jù)AD采集結果和采集時間擬合得出準確的過零時刻,并對過零后的30°電角度進行修正,從而大大減小了只在PWM ON期間檢測反電勢而造成的過零檢測誤差,提高了換向精度。
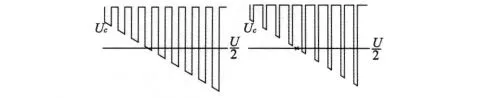
圖4 空閑繞組反電勢過零點示意圖
3 系統(tǒng)軟件設計
3.1 直接反電勢檢測實現(xiàn)方法
本系統(tǒng)采用STM32處理器的TIM1產(chǎn)生PWM信號,TIM2用于觸發(fā)ADC轉換,TIM1和TIM2工作在主從門控模式,TIM1的OC1REF信號與PWM信號相位相同,在CPU內部將OC1REF配置為TIM2的門控信號,當OC1REF為高電平,即PWM ON期間TIM2才工作。TIM2工作在比較匹配翻轉模式,用TIM2的比較匹配信號作為ADC的起動轉換信號,如圖5所示,TIM2的比較寄存器值較小,從而在PWM ON期間實現(xiàn)了多次反電勢電壓AD采集。本系統(tǒng)中STM32處理器的ADC采樣率配置為1MSPS,完成一次AD轉換僅需1 μs。本系統(tǒng)利用ADC轉換完成信號自動觸發(fā)兩個通道的DMA傳輸,一個通道記錄ADC轉換結果,另一個通道記錄當前的系統(tǒng)時鐘(systick)計數(shù)值,作為AD轉換完成時刻。
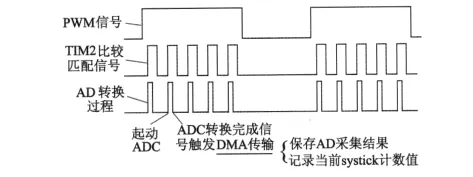
圖5 直接反電勢檢測方法示意圖
ADC看門狗用于監(jiān)測AD轉換結果是否穿越U/2,當發(fā)生ADC看門狗中斷,則在中斷服務程序中查找U/2電壓前后兩次的轉換結果,記作V1ADC和V2ADC,相應的轉換時刻值記作t1和t2,則過零點發(fā)生時systick計數(shù)值

式中:VNADC為對應的AD值,t為擬合后的過零時刻。前后兩次過零時刻的差值便是60°電角度對應的時間,除以2得到30°電角度對應的時間,從而t后延時30°電角度便可再次執(zhí)行換向動作。
3.2 電機閉環(huán)換相運行過程
實測發(fā)現(xiàn),電機換相后的瞬間相電壓會出現(xiàn)一個反向的脈沖,本設計中換相后延時20 μs再進行ADC采集,防止反向脈沖造成誤觸發(fā)。點擊閉環(huán)換相運行狀態(tài)的工作流程,如圖6所示,換相之后,立刻記錄當前定時器的值CounterTime,然后修改定時器的比較匹配寄存器的值為CounterTime+20 μs對應的計數(shù)器值;于此同時,在這段延遲時間內處理器完成ADC看門狗(AWD)和DMA的配置。延遲時間結束后,在比較匹配中斷中起動觸發(fā)定時器TIM2、AWD和DMA,隨后在PWM ON期間觸發(fā)定時器會多次觸發(fā)ADC轉換,并通過DMA自動記錄轉換結果和轉換時刻,當ADC轉換結果穿越中點電壓時,進入AWD中斷,在中斷服務程序中取出DMA緩沖區(qū)中記錄的中斷發(fā)生前兩次的電壓值和時刻值,利用式(5)便可以計算出過零發(fā)生的時刻Tcross,兩次過零的間隙時間除以2便是30°電角度時間T30,將定時器比較匹配寄存器配置為Tcross+T30,則下次比較匹配中斷時刻再次進行換相。
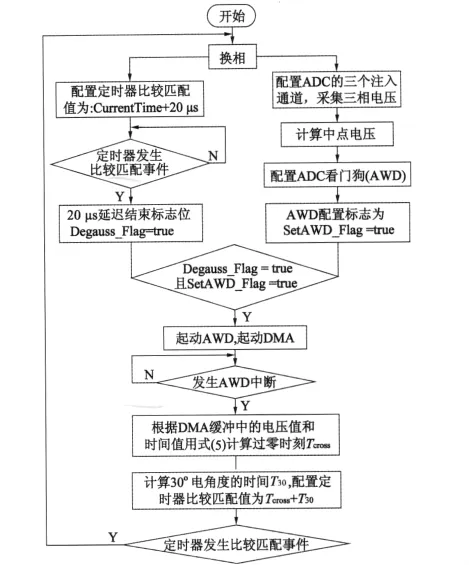
圖6 BLCDM閉環(huán)換相運行流程圖
3.3 BLDCM起動策略
對于有位置傳感器的無刷直流電動機控制系統(tǒng),電機轉動或者靜止情況下都可以通過微控制器的捕獲單元接口,來獲取傳感器信號進而判斷電機轉子位置,為逆變電路控制邏輯提供正確的換相信息,從而順利實現(xiàn)電機的起動過程。但是對于通過檢測反電動勢來判斷換相時刻的無位置傳感器無刷直流電動機控制系統(tǒng)而言,由于靜止或低速時電機,沒有反電動勢或是信號非常微弱,無法直接測量反電勢,因此電機起動過程需要強制換相使電機轉動,當達到某一轉速后,反電勢信號足夠大,依此來檢測過零信號,并進入基于反電勢檢測的閉環(huán)換相狀態(tài)。
本系統(tǒng)中首先對T1和T4導通200 ms,AB相得電并維持一段時間實現(xiàn)了電機轉子定位,然后按照電機的換相順序周期性的強制換相,并且不斷縮短換相周期,使電機加速運行,經(jīng)過若干個換相周期后,電機具有一定的轉速,然后關閉所有MOSFET,電機自由運行,于此同時立即起動反電動勢信號檢測,當檢測到第一次過零信號后,定時器開始計時,檢測到第二次過零信號后,定時器停止計時,此段時間便是60°電角度對應的時間,然后以第二次過零信號為起始,延時30°電角度便是下一次換相時刻,從而電機進入閉環(huán)換相運行狀態(tài),完成了電機的起動過程。
4 實驗結果分析和結論
電機起動過程中A相電壓波形如圖7(a)所示,一開始為強制換相運行,達到一定轉速后電機自由旋轉并檢測反電勢,隨后切入到閉環(huán)換相運行狀態(tài)。進入閉環(huán)換相運行后,換相動作按照電機反電勢,也即轉子位置來切換,在同樣轉速的情況下電流消耗和噪聲都明顯減小,圖7(b)為電機閉環(huán)運行過程中A、B相的電壓波形。
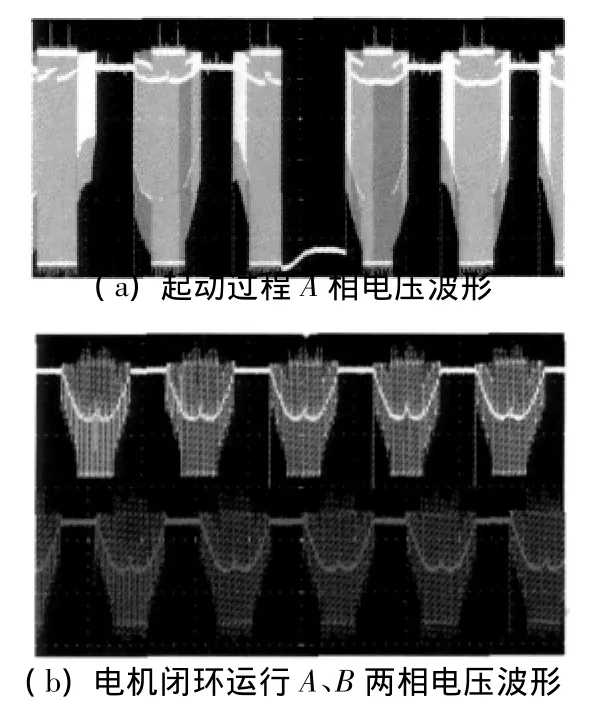
圖7 電壓波形
本文提出一種新穎的BLDCM直接反電勢檢測方法,該方法無需重構電機中性點,無需對反電勢進行信號濾波,無相位滯后的弊端,對高頻開關噪聲不敏感;其次本方法采用在PWM ON期間對反電勢檢測,并通過軟件手段對檢測誤差進行補償,彌補了PWM占空比較低時檢測精度較低的不足,勝任高速運行的場合。實踐證明,該反電勢檢測方法可以在較寬的速度范圍內良好地工作,電路結構簡單,具有很好的工程應用價值。
[1]楊光,李醒飛.無刷直流電機反電勢過零點檢測轉子位置研究[J].電力電子技術,2008(10):18 -19,30.
[2]李自成,程善美,秦實宏,等.無刷直流電機無位置傳感器控制調速系統(tǒng)的設計與實現(xiàn)[J].電機與控制應用,2010,37(8):39-41.
[3]Shao Jianwen,Nolan D,Hopkins T.A novel direct back EMF detection for sensorless brushless DC(BLDC)motor drives[C]//APEC'02 Dallas,USA IEEE Press,2002:33 -38.
[4]Shao Jianwen,Nolan D,Hopkins T.Improved direct back EMF detection for sensorless brushless DC(BLDC)motor drives[C]//APEC'03 Florida,USA:IEEE Press,2003:300 -305.
[5]張磊,肖偉,瞿文.龍直接檢測無刷直流電機轉子位置信號的方法[J].清華大學學報(自然科學版),2006,46(4):453 -456.
猜你喜歡
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
中學生數(shù)理化·七年級數(shù)學人教版(2021年6期)2021-11-22 07:50:58
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
中學生數(shù)理化·七年級數(shù)學人教版(2020年12期)2021-01-18 06:57:46
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
海峽科技與產(chǎn)業(yè)(2016年3期)2016-05-17 04:32:12
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25