無刷直流電動機的DSP控制
2012-07-06 02:01:22甄長飛
重慶理工大學學報(自然科學) 2012年3期
關鍵詞:設計
王 越,甄長飛
(重慶理工大學計算機科學與工程學院,重慶 400054)
直流電動機具有非常優秀的線性機械特性、較寬的調速范圍、簡單的控制電路、大的起動轉矩等,但是直流電動機的電刷和換向器卻成為其發展的障礙。而無刷直流電動機利用電子換向器取代機械電刷和機械換向器,既保留了直流電動機的優點,又具有交流電動機結構簡單、運行可靠、維護方便等特點。隨著大功率開關器件、集成電路及高性能磁性材料的進一步發展,無刷直流電動機更是得到廣泛應用。傳統的微處理器控制系統由于存在處理速度慢、乘除法所用周期過長、外圍電路數據轉換速度慢等缺點,使無刷電動機的性能得不到充分發揮[1-3]。本文基于美國TI公司TMS320LF2407A數字信號處理器(DSP),闡述了實現無刷直流電動DSP控制的原理與方法[4-12]。
1 無刷直流電動機工作原理
無刷直流電動機可以被認為是一個電動機系統,包括電子開關電路、永磁式同步電動機和位置傳感器。與普通直流電動機相反,無刷直流電動機將電樞放到定子上,把轉子做成永磁體。為使定子磁場與轉子永磁場始終保持90°左右的空間夾角,產生轉矩推動轉子旋轉,無刷直流電動機必須使定子電樞各相繞組不斷地換相通電,才能使定子磁場隨轉子的位置不斷變化。這個換相通電過程也可以說是磁場旋轉過程。在換相過程中,定子各相繞組在工作氣隙中所形成的旋轉磁場是做跳躍式運動的。它們跟蹤轉子,并與轉子的磁場相互作用,從而產生推動轉子繼續轉動的轉矩。
2 DSP控制策略
理想的無刷直流電動機的感應電動勢和電磁轉矩計算公式為:
其中:Np為通電導體數;B為永磁體產生的氣隙磁通密度;l為轉子鐵心長度;r為轉子半徑;is為定子電流。
由式(1)、(2)可知,轉子轉速與感應電動勢成正比,電磁轉矩與定子電流成正比,因此無刷直流電動機與有刷直流電動機一樣具有良好的控制性能。
圖1是用TMS320LF2407A DSP實現無刷直流電動機調速的控制和驅動電路。
本設計采用TMS320LF2407A微控制器為控制核心,以功率MOSFET為功率變換元件,任意時刻電機只有兩相導通,并采用PWM方式控制電動機的轉矩和轉速。圖1中的3個霍爾傳感器經整形隔離電路后分別與DSP的3個捕捉引腳相連,通過產生捕捉中斷來給出換相時刻,同時給出位置信息。而電流反饋輸出經濾波放大電路連接到TMS320LF2407A的ADC輸入端ADCIN00,在每一個PWM周期都對電流進行一次采樣,對速度(PWM占空比)進行控制,其方法是通過與DSP的PWM1~PWM6引腳經反向驅動電路的6個開關管實現PWM定頻和換相控制[13-15]。
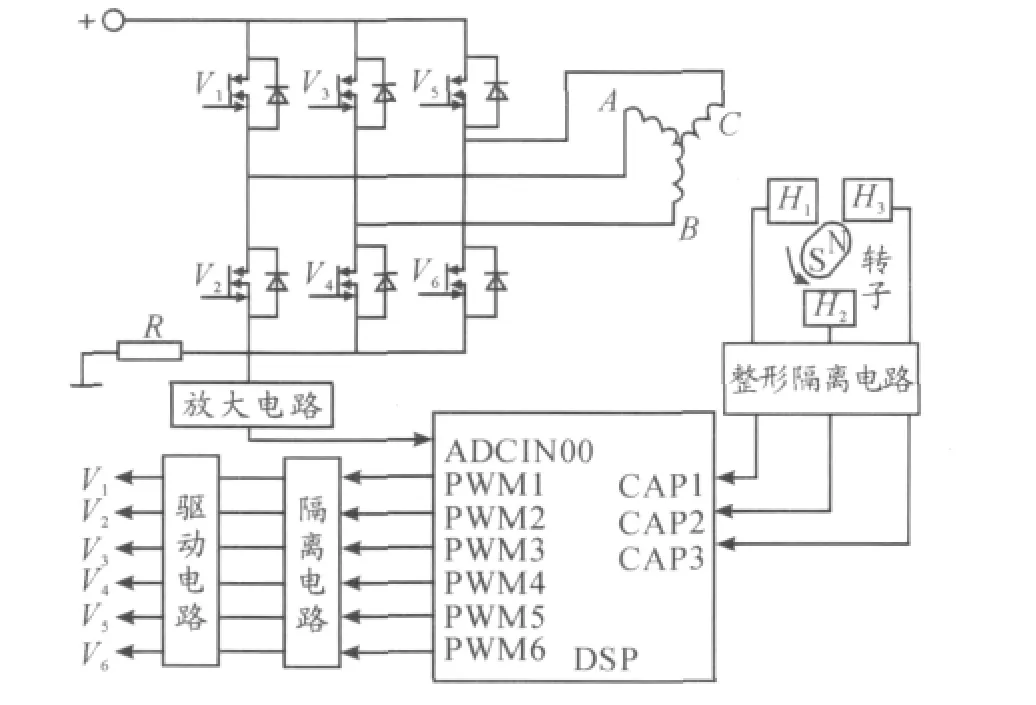
圖1 DSP控制和驅動電路
無刷電動機的感應電動勢與轉速成正比,轉矩與電流成正比。圖2為無刷直流電動機調速控制框圖。給定的轉速與速度反饋量形成偏差,經速度調節后產生電流參考量,它與電流反饋量的偏差經電流調節后形成PWM占空比控制量,實現電動機的速度控制。其中速度反饋由霍爾位置傳感器輸出量經計算得到,而電流反饋通過監測電阻R得到。

圖2 無刷直流電動機的調速控制框圖
2.1 電流檢測
用電阻R作電流傳感器。將其放在電源對地端,而電動機只有兩相通電,且與電阻R形成回路,電流的檢測則可由分壓電阻R來實現。電流反饋經濾波放大電路鏈接到TMS320LF2407A的ADCIN00,每一個PWM周期對電流采樣1次,從而對速度(占空比)進行控制。
2.2 位置和速度檢測
位置信號通過3個霍爾傳感器得到,傳感器的輸出端直接連接到CAP/QEP引腳。3個霍爾傳感器的輸出信號為相位差為120°的脈沖信號,它們在每一個機械轉動中共有6個上升或下降沿。將DSP的捕捉接口CAP1~CAP3設置為I/O口,檢測電平狀態就可以知道哪一個霍爾傳感器的什么沿觸發的捕捉中斷。本研究將捕捉口的電平狀態稱為換相控制字,根據表1所示的對應關系實現換相。
位置信號還可以產生速度控制量。只要測得2次換相時間間隔Δt,就可以計算出2次換相間隔期的平均角速度。

2次換相的時間間隔Δt可以通過捕捉中斷發生時讀定時器2的T2CNT寄存器的值來獲得。

表1 換相控制字與換相的對應關系
2.3 速度調節
速度調節采用最通用的PI算法,計算公式為

其中:Vk為速度調節輸出;ek為第k次速度偏差;Kp為速度比例系數;Ki為速度積分系數;T為速度調節周期。
3 控制系統軟件設計
由于直流電動機在啟動時同樣需要位置信號,因此通過3個霍爾傳感器的輸出來判斷應該先給哪兩相通電,并且給出一個不變的供電電流,直到第1次速度調節。根據以上分析,設計控制程序如圖3~4所示。
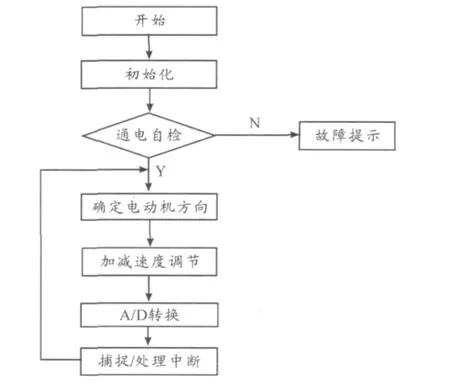
圖3 主程序框圖
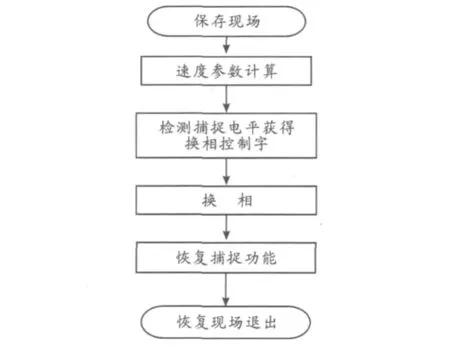
圖4 捕捉中斷子程序框圖
4 結束語
本研究所設計的無刷直流電動機調速控制系統利用了TMS320LF2407A芯片運算速度快、閃存大等特點,具有結構簡單、數模轉換(A/D)迅速、維護方便的優點,能使電動機迅速加速運轉,是當前直流電動機快速控制的主流方式。
[1]王曉明,王玲.電動機的DSP控制[M].北京:北京航空航天大學出版社,2004.
[2]冉冉,陳方輝.單片機在電動車永磁直流電機控制系統設計中的應用[J].重慶工學院學報:自然科學版,2009,23(12):120-122.
[3]潘艷艷,曹華,陶彩霞.直流電機雙閉環調速系統的動態模型仿真[J].重慶工學院學報:自然科學版,2009,23(8):149-156.
[4]樊帆.王耀青.DSP在三相無刷直流電動機中的應用[J].DSP 開發與應用,2007,23(1/2):225-226.
[5]岳夕彪,楊潤生.基于DSP的無刷直流電動機控制電路設計[J].四川兵工學報,2010,31(2):90-93.
[6]施智雄,張玉成.基于ARM+DSP的農業科研參數及圖片自動記錄儀的設計[J].安徽農業科學,2009,37(7):3340-334.
[7]景軍鋒,唐雪娟.基于DSP的永磁同步電機全數字變頻調速控制系統設計[J].電機與控制應用,2010(2):43-46,59.
[8]胡寶興,賈穎偉.電動自行車用無刷直流電動機控制器設計[J].微電機,2006,34(12):29-30,33.
[9]鄭紅,隋強強,周星.DSP應用系統設計實例[M].北京:北京航空航天大學出版社,2008.
[10]劉桂芬.基于DSP的三相無刷直流電動機調速系統的研究[D].阜新:遼寧工程技術大學,2004.
[11]彭志剛.基于dsPIC30F6010的無傳感器無刷直流電機控制[J].自動化與儀器儀表,2011(2):74-76.
[12]馬乾.直流無刷電機在軌道交通站臺安全門系統中的應用設計[J].自動化與儀器儀表,2010(4):84-86.
[13]趙美蓉,秦峰,林玉池.回轉式壓電微角度電動機的反饋控制系統設計[J].壓電與聲光,2010(6):922-955.
[14]胡長德,羅清青,諸葛晶昌.大行程納米級壓電動機的驅動控制系統[J].壓電與聲光,2009(5):688-691.
[15]吳政敏,黃維玲,馬新敏,等.激光電源中DSP數字控制技術的研究[J].激光雜志,2003(3):22-23.
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
