基于模糊PI控制的永磁同步直線電機調速系
2012-07-16 15:03:08張海嘯劉亞濤
山西建筑 2012年29期
關鍵詞:系統
張海嘯 劉亞濤
(1.太原重工股份有限公司技術中心,山西太原 030024;2.太原市熱力設計有限公司,山西太原 030002)
0 引言
永磁同步直線電機(PMLSM)兼有永磁電機和直線電機的雙重優點,與直線感應電機相比,PMLSM具有指標高、體積小、重量輕等優點,因而不斷在許多領域得到了應用。例如垂直升降輸送系統、高速地面運輸系統、往復式空氣壓縮機等等,其潛在的理論價值和技術經濟效益巨大,應用前景十分寬闊。
PMLSM調速系統本身就是一個有較強非線性、多變性及強耦合的復雜系統,考慮到系統運行過程中受到的干擾因素,控制起來比較困難。因此,尋找一種合適的控制策略具有重要的意義。傳統的PID控制過分依賴于控制對象模型,參數魯棒性較差,抗擾動能力不太強,對于PMLSM這樣復雜的調速系統很難滿足控制要求。模糊控制系統的魯棒性強,干擾和參數變化對控制效果的影響被大大減弱,尤其適合于非線性、時變及純滯后系統的控制。自適應模糊PI控制通過模糊控制規則自動整定控制器參數,大大改善了系統的穩態精度和動態響應,文中首先介紹了PMLSM矢量控制系統的基本原理,然后對基于SVPWM脈寬調制的PMLSM矢量控制調速系統進行闡述,重點研究了自適應模糊PI控制方法,對該控制方法進行了理論分析并建模仿真,仿真結果表明自適應模糊PI控制策略可以大大改善PMLSM矢量控制調速系統的控制性能。
1 PMLSM矢量控制系統
1.1 d軸—q軸坐標系PMLSM數學模型
在建立d軸—q軸下數學模型之前,針對PMLSM的特點,先作以下幾點假設:初級上沒有阻尼繞組;不計渦流及磁滯損耗;忽略鐵心飽和;反電動勢波形為正弦分布;永磁也沒有阻尼作用。這樣做可以忽略一些影響較小的因素,簡化分析過程,根據坐標變換理論,可得出d軸—q軸坐標系下PMLSM的數學模型。
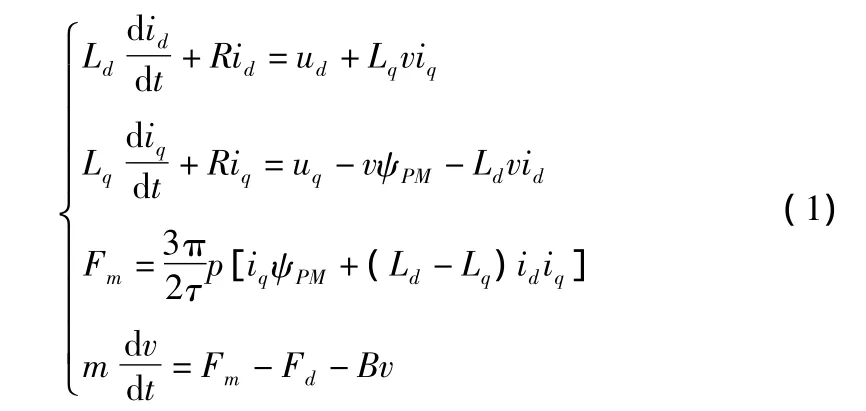
其中,id,iq分別為電樞繞組d軸、q軸電流;ud,uq分別為電樞繞組d軸、q軸電壓;Ld,Lq分別為電樞繞組d軸、q軸電感;R為電樞繞組電阻;p為電機極對數;M為動子質量;B為粘滯摩擦系數;v為動子運動線速度;τ為初級繞組極距;ψPM為永磁體磁鏈;Fd為負載推力。
1.2 PMLSM矢量控制系統
矢量控制實現的基本原理是通過測量和控制定子電流矢量,根據磁場定向原理分別對產生磁場的電流分量(勵磁電流)和產生轉矩的電流分量(轉矩電流)進行控制,從而實現對負載擾動和參考值變化的快速響應。PMLSM的矢量控制最終目的是對電機初級電流的控制。由PMLSM數學模型中推力等式知,PMLSM的電磁推力大小基本上取決于初級直軸和交軸電流分量,在矢量控制方式下,采用了按動子磁鏈定向(id=0)的控制思想,使初級電流矢量位于q軸,無d軸分量,即初級電流全部用來產生轉矩,此時,PMLSM的數學模型可寫為:
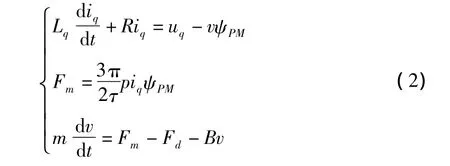
由式(2)知,PMLSM的推力只與電樞交軸電流的幅值成正比,實現了解耦控制。此種控制方式較為簡單,由位置傳感器測得PMLSM的實際位移S,將直線運動產生的直線位移S轉換為類似旋轉電機轉子的角位置θ,有只要準確地檢測角位置θ,便可控制逆變器讓三相初級的合成電流即磁動勢位于q軸上,此時,PMLSM的電磁轉矩只與初級電流的幅值成正比,那么,控制初級電流的幅值就可以很好地控制電磁轉矩,此時的控制方式類似直流電機的控制,能夠得到滿意的推力控制特性。PMLSM的控制系統的原理圖如圖1所示。主回路由空間電壓矢量(SVPWM)逆變器、三相整流電路、PMLSM本體、電流檢測回路及位置傳感器等組成。控制回路由電流控制器、速度控制器、驅動電路及PWM生成器等組成。
首先根據位置傳感器檢測到的速度S計算出的動子速度v,將其與設定參考速度vref進行比較,再通過模糊PI調節器的分析,計算出初級交軸電流的參考輸入isqref,此時控制直軸電流isdref=0,經坐標變換將電流檢測電路檢測到 id,iq,轉換得到 isd,isq,將isd,isq分別與它們的參考給定isdref,isqref進行比較,通過兩個電流PI調節器的分析計算得到合適的控制量。由轉速外環和電流內環構成了PMLSM的雙閉環控制系統。該控制系統中采用了空間電壓矢量脈寬調制(SVPWM)技術,由于SVPWM電壓利用率高、開關損耗小、諧波少等優點,大大改善了PMLSM的調速性能。
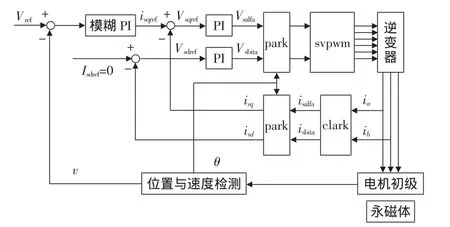
圖1 PMLSM矢量控制原理圖
2 模糊PI復合控制器的設計
2.1 控制方案的設計思路
PMLSM矢量控制系統應用電流、速度雙閉環控制策略。電流環仍采用傳統PI電流控制,速度環采用自適應模糊PI控制方式,模糊控制方法對被控對象的時滯、非線性和時變性具有較強的適應能力,對干擾或噪聲具有更強的抑制功能,即更強的魯棒性,但消除系統穩態誤差的性能比較差,難以達到較高的精度。PI控制對參數確定的模型具有快速性好、精確度高的特性,綜合兩者的優勢,提出自適應模糊PI控制方法。自適應模糊PI控制器分兩步進行設計,首先在不考慮模糊控制的前提下,用工程方法計算PI參數,然后依據已有的系統控制原理,運用模糊控制策略,對PI參數進行在線的調整計算,適當地增加或減小控制力度,使輸出盡快跟隨給定速度。基于這種思路來設計自適應模糊PI控制器,實時計算工作量小,物理意義明確,便于工程運用。
2.2 自適應模糊PI控制器的設計
設計中使用的是一個兩輸入E,EC,兩輸出Kp,Ki的二維模糊控制器,將電機給定轉速和實際轉速間的偏差E,以及偏差變化率EC作為模糊控制器的輸入變量,計算出PI控制器的兩個控制參數與偏差及偏差變化率之間的模糊關系,運行過程中不斷檢測E和EC,再依據模糊控制原理來對兩個參數進行在線修改調整,以滿足不同E和EC時對控制參數的不同要求。
原理圖如圖2所示:▽Kp,▽Ki為模糊控制器的輸出,Kp,Ki為工程方法整定的PI參數,根據被控制對象的狀態在線自動調整PI參數,由此實現PI參數的在線自適應調整。設計步驟如下:
1)模糊控制器的輸入輸出語言變量各分為七個模糊子集,分別用語言變量{正大(PB)、正中(PM)、正小(PS)、零(ZO)、負大(NB)、負中(NM)、負小(NS)}表示,并規定其隸屬度。輸入輸出變量的論域均為{-3-2-1 0 1 2 3},輸入輸出語言變量服從的隸屬函數如圖3所示。
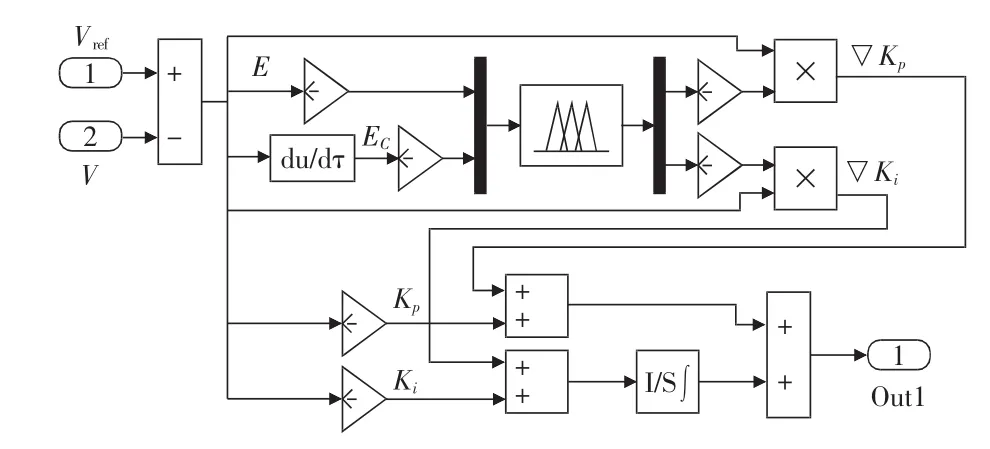
圖2 自適應模糊PI控制器原理圖
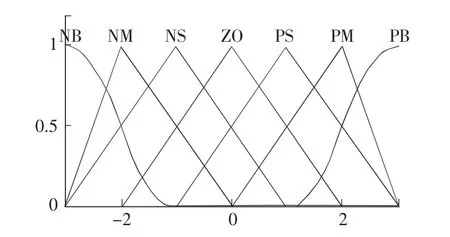
圖3 輸入輸出變量的隸屬度函數
2)模糊控制規則表及模糊輸出曲面。模糊決策采用Mamdani型推理算法,總結以往工程實際操作經驗得到的PI參數調整原則,可以得到輸出變量Kp,Ki的控制規則表如表1所示。
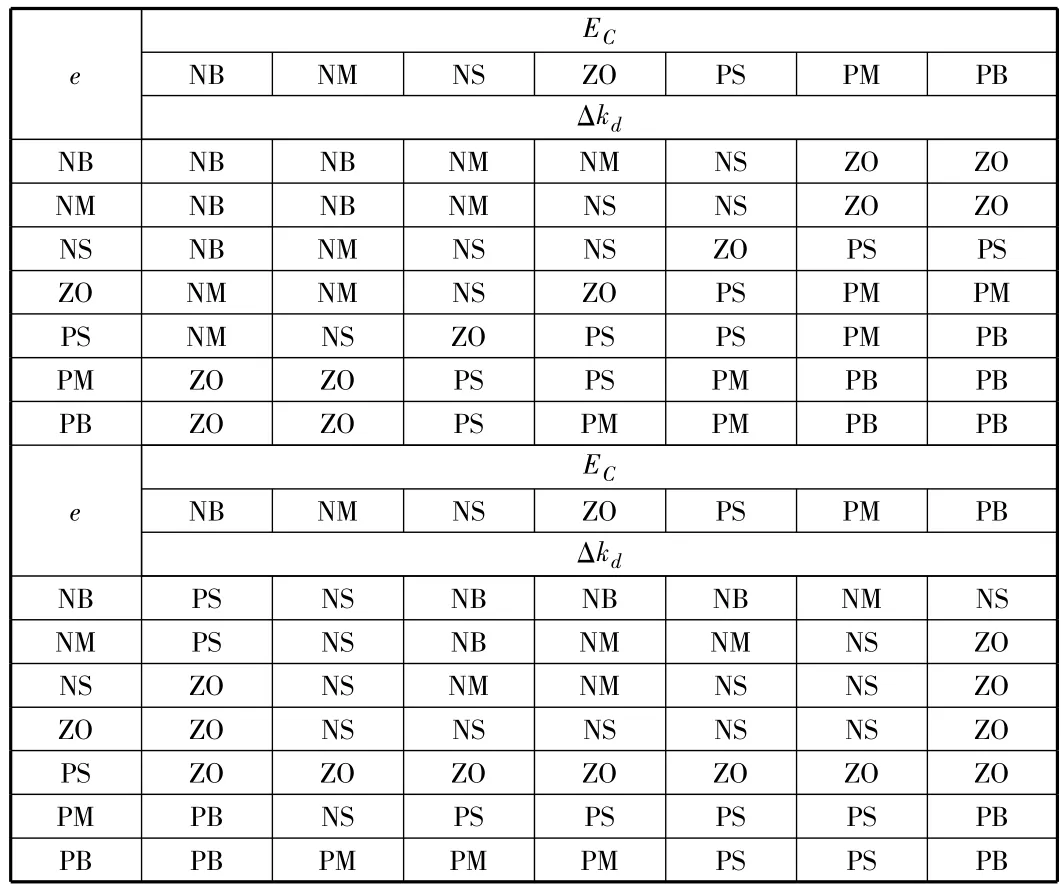
表1 輸出變量的控制規則表
3 仿真分析
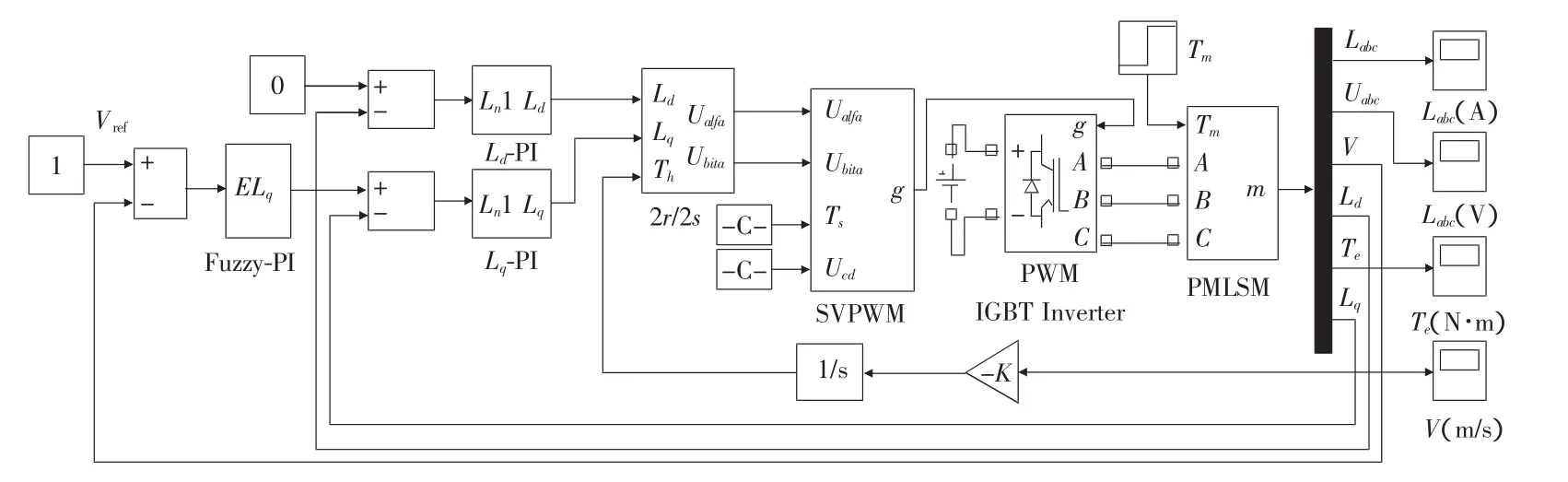
圖4 基于模糊PI復合控制的PMLSM矢量控制系統仿真結構圖
系統建模仿真主要目的是考察自適應模糊PI控制器在改善控制性能方面的作用,在MATLAB7.0/SIMULINK下進行建模仿真。PMLSM的參數:初級電樞d軸,q軸電感Ld=Lq=18.74 mh;初級電樞電阻R=1.252 Ω;動子質量m=25 kg;極距τ=36 mm;極對數P=2;永磁體磁鏈Ψf=0.286 Wb;粘滯摩擦系數B=0.2 N·s/m;目標速度給定值vref=1 m/s。基于自適應模糊PI控制的PMLSM矢量控制系統仿真結構如圖4所示,為了驗證所設計的PMLSM控制系統的性能,文中進行了系統加載啟動、突改負載的仿真,得到系統速度仿真曲線如圖5所示。
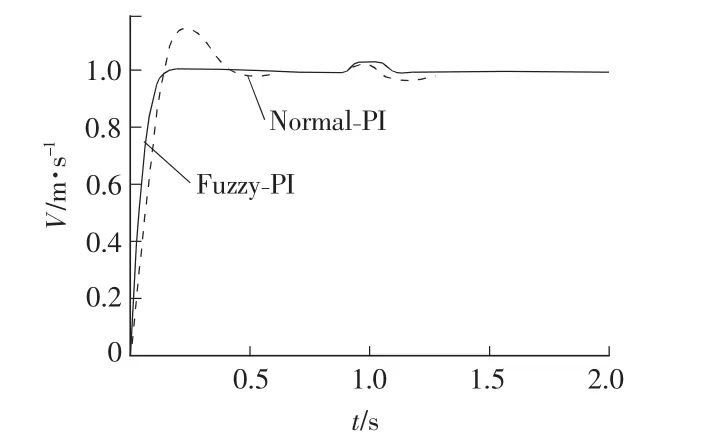
圖5 PMLSM控制系統速度仿真圖
仿真設置:初始給定速度為1 m/s;負載推力為80 N,0.9 s時負載推力由80 N突減為60 N。速度仿真曲線如圖5所示。
經分析發現,采用模糊PI復合控制較傳統的PI控制具有更強的魯棒性,啟動快,超調量小,調節時間減少,系統響應速度增加。當負載推力從80 N下降到60 N時,傳統PI控制出現了5%的速度波動,并經過0.2 s才能恢復穩定;而模糊PI復合控制受到負載干擾沖擊要小,速度波動和恢復穩定的時間分別為2%和0.1 s,后者在上升時間,超調及靜差方面均優于常規PI控制。
4 結語
基于自適應模糊PI控制策略的PMLSM矢量控制系統,充分利用MATLAB軟件模糊邏輯工具箱的強大功能,根據系統的數學模型,建立仿真模型。模型簡單、合理,仿真速度快,結果接近實際情況,對系統的實際運行具有可靠的理論參考價值。仿真結果表明,和PI控制相比該策略具有更好的動態、穩態性能,證明了該控制系統的合理性。
[1]唐任遠.現代永磁電機理論與設計[M].北京:機械工業出版社,1997.
[2]李志明,張遇杰.同步電動機調速系統[M].北京:機械工業出版社,1996.
[3]王建寬,崔 巍,江建中.SVPWM技術的理論分析及仿真[J].微特電機,2006(6):15-18.
[4]劉紅釗,付子義.永磁直線同步電動機垂直運輸系統模糊控制策略的研究[J].機電工程技術,2007,36(2):13-15.
[5]劉紅波,李少遠,柴天佑.一種基于模糊切換的模糊復合控制器及其應用[J].控制與決策,2003,18(5):615-616.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32