歷史航片數(shù)據(jù)處理技術(shù)及方法探討
2012-09-22 10:30:02徐衛(wèi)民陳香王琳
城市勘測(cè) 2012年6期
關(guān)鍵詞:數(shù)據(jù)處理歷史
徐衛(wèi)民,陳香,王琳
(天津市測(cè)繪院,天津 300381)
1 引言
為了滿足現(xiàn)代測(cè)繪成果管理的需要,充分發(fā)揮歷史航片的科學(xué)價(jià)值,國(guó)家測(cè)繪地理信息局啟動(dòng)了“國(guó)家基礎(chǔ)航空攝影資料數(shù)字化與建庫(kù)”項(xiàng)目。該項(xiàng)目旨在完成航片的掃描數(shù)字化,建立航片影像數(shù)據(jù)庫(kù),對(duì)實(shí)現(xiàn)航空攝影資料管理的數(shù)字化、保證檔案資料的安全完整、增強(qiáng)測(cè)繪保障能力具有重要意義[1]。
天津市測(cè)繪院于2004年啟動(dòng)歷史航片的掃描任務(wù),2011年啟動(dòng)并完成歷史航片正射影像圖的制作。由于年代久遠(yuǎn)、數(shù)據(jù)資料的遺失、控制點(diǎn)的難以獲取以及影像的掃描質(zhì)量問(wèn)題,在歷史航片數(shù)據(jù)制作過(guò)程中碰到了不少困難。本文基于歷史航片的數(shù)據(jù)處理,對(duì)采用高分辨率遙感影像一體化測(cè)圖系統(tǒng)PixelGrid(以下簡(jiǎn)稱“PixelGrid系統(tǒng)”)處理歷史影像的方法、流程及關(guān)鍵技術(shù)環(huán)節(jié)進(jìn)行探討,并對(duì)成果精度進(jìn)行分析。
2 歷史航片數(shù)據(jù)處理難點(diǎn)
歷史航片涉及的航攝儀有RC30,RC20,RC-8等不同類型,攝影比例尺從1/35000~1/3200不等,地面分辨率有 0.1 m,0.2 m,0.5 m和 1 m,膠片類型有黑白和彩紅外兩種。在數(shù)據(jù)制作過(guò)程中碰到不少困難及問(wèn)題,主要有以下原因:
(1)數(shù)據(jù)資料的遺失
紙質(zhì)文檔不可避免存在丟失損壞,數(shù)據(jù)資料的丟失主要表現(xiàn)為內(nèi)定向參數(shù)的丟失,缺少像主點(diǎn)偏移或焦距,在實(shí)際作業(yè)過(guò)程中通過(guò)查找相機(jī)型號(hào)補(bǔ)回這些資料,或把像主點(diǎn)偏移設(shè)置為0進(jìn)行后續(xù)作業(yè)。
(2)控制點(diǎn)的難以獲取
由于年代相隔較遠(yuǎn),部分區(qū)域地形發(fā)生較大變化,空三加密時(shí)很難布設(shè)控制點(diǎn)。采用逐級(jí)控制方法,即新年份影像控制老年份影像;同時(shí)為防止誤差積累過(guò)大,實(shí)際作業(yè)過(guò)程中用1990年代影像控制1980年代,1980年代控制1970年代。
(3)部分影像質(zhì)量差,噪聲大
由于數(shù)據(jù)保存時(shí)間較長(zhǎng)或掃描問(wèn)題,較早年份的影像噪聲較大,如圖1所示,在空曠的農(nóng)田區(qū)域出現(xiàn)一些白色的噪聲,給后續(xù)數(shù)據(jù)處理帶來(lái)一定困難,主要表現(xiàn)不能成功提取連接點(diǎn)或提取連接點(diǎn)的錯(cuò)誤率較高,需人工干預(yù)較多。
圖1 噪聲較大的影像
3 歷史航片數(shù)據(jù)處理方法
歷史航片的數(shù)據(jù)處理流程如圖2所示,掃描影像數(shù)據(jù)得到數(shù)字影像,通過(guò)PixelGrid軟件進(jìn)行空三加密及正射糾正,將正射糾正結(jié)果導(dǎo)入ERDAS軟件鑲嵌裁圖,在Photoshop軟件中檢查及修改正射影像,最后按照標(biāo)準(zhǔn)分幅裁圖。針對(duì)歷史航片的數(shù)據(jù)特點(diǎn),下面就一些關(guān)鍵過(guò)程進(jìn)行介紹。
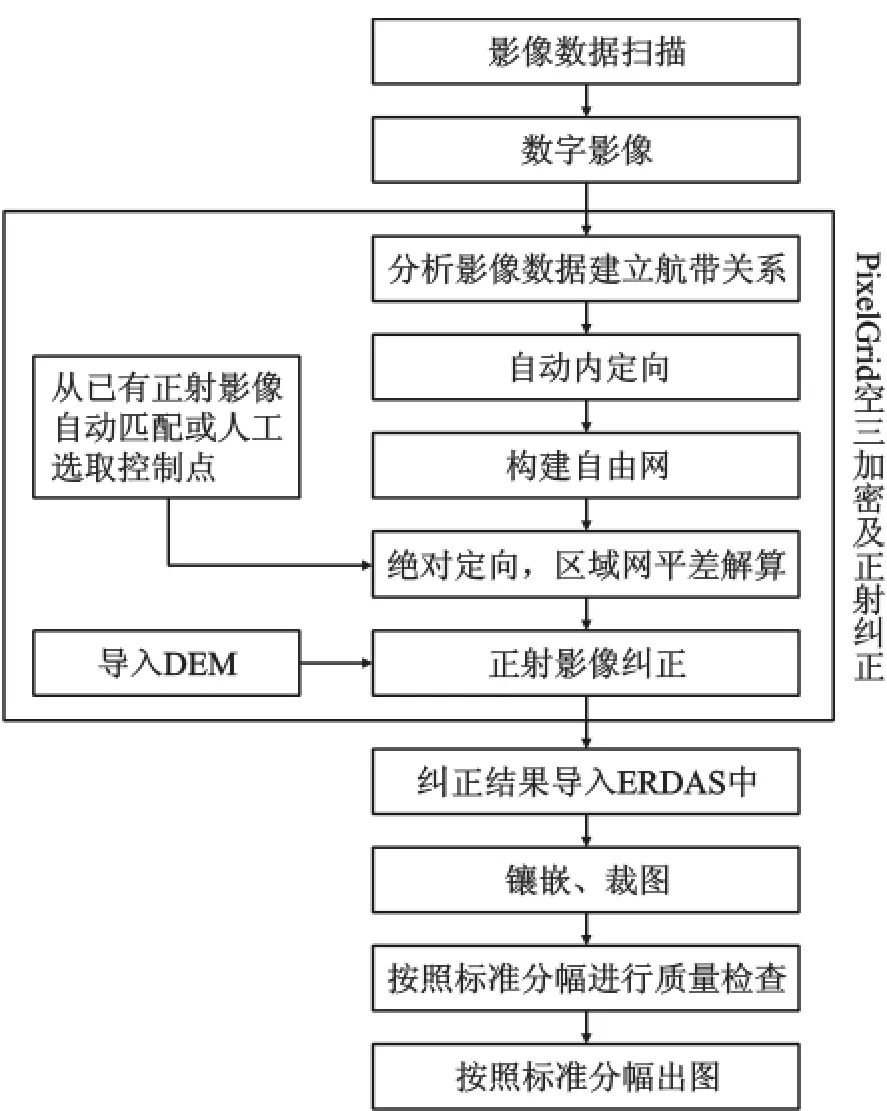
圖2 歷史航片數(shù)據(jù)處理流程
3.1 影像數(shù)據(jù)掃描
檢查航片是否有撕裂、斷裂、嚴(yán)重劃痕和抽片情況,并對(duì)航片進(jìn)行清潔,以保證航片上不沾有污物。以航線為單位,瀏覽所要掃描的航片,并按照地物類型,將這些航片大致分類,以使分類后的這一類航片能夠按照該類的掃描參數(shù)進(jìn)行掃描并確保掃描后影像的質(zhì)量。掃描后的影像保證其反差適中、色調(diào)飽和、框標(biāo)清晰、影像灰度直方圖的灰度值在0~255灰度級(jí)之間連續(xù),并整體呈正態(tài)分布,直方圖底部接近兩端。
3.2 自動(dòng)內(nèi)定向
內(nèi)定向就是根據(jù)像片的框標(biāo)坐標(biāo)和相應(yīng)的攝影機(jī)檢定參數(shù),恢復(fù)像片和攝影機(jī)的相關(guān)位置,即建立像片坐標(biāo)系[2]。根據(jù)航攝鑒定表,建立相機(jī)檢校文件。對(duì)于如圖3所示的航攝鑒定表,由于數(shù)據(jù)資料的遺失,沒(méi)有考慮像主點(diǎn)偏移,其四角框標(biāo)坐標(biāo)為:
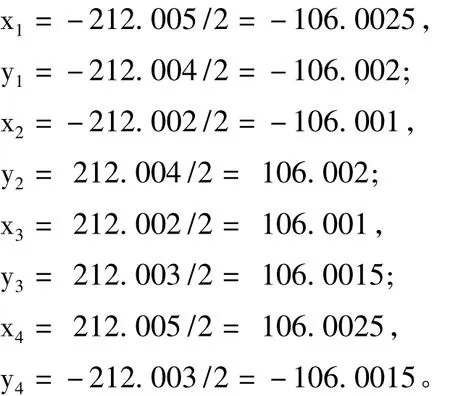
內(nèi)定向采用仿射變換進(jìn)行框標(biāo)坐標(biāo)計(jì)算,框標(biāo)坐標(biāo)殘差絕對(duì)值一般不大于0.010 mm,由于部分航攝區(qū)像主點(diǎn)資料的遺失,其殘差絕對(duì)值有所增大,最大不超過(guò)0.020 mm。

圖3 航攝鑒定表部分截圖
3.3 自由網(wǎng)的構(gòu)建
歷史航片不帶有POS輔助信息,其連接點(diǎn)的提取采用單模型相對(duì)定向、模型連接構(gòu)建自由航帶網(wǎng),定義航帶初始偏移量進(jìn)行航帶間轉(zhuǎn)點(diǎn)。若某些區(qū)域連接薄弱,需要人工加連接點(diǎn)。每個(gè)像對(duì)連接點(diǎn)分布均勻,每個(gè)標(biāo)準(zhǔn)點(diǎn)位區(qū)有連接點(diǎn)[3],每個(gè)像對(duì)連接點(diǎn)數(shù)目一般不少于30個(gè)。
平差解算是通過(guò)PATB軟件進(jìn)行的。整個(gè)過(guò)程是平差解算——剔除或修測(cè)粗差——平差解算,循環(huán)進(jìn)行,直至像點(diǎn)的最大殘差不超過(guò)2個(gè)像素(即40 u),PATB平差解算的中誤差不應(yīng)超過(guò)2/3個(gè)像素(即13.3 u)。平差解算可能會(huì)不收斂,是由于像點(diǎn)網(wǎng)不穩(wěn)定,部分區(qū)域缺乏連接點(diǎn)造成的,在這種情況下需人工加連接點(diǎn),加點(diǎn)原則是航向連接點(diǎn)宜大于3°重疊,旁向連接點(diǎn)宜大于6°重疊。在粗差剔除或修測(cè)過(guò)程中,同時(shí)要關(guān)注像點(diǎn)網(wǎng)的構(gòu)成,對(duì)缺乏連接點(diǎn)的區(qū)域人工加點(diǎn)。
3.4 控制點(diǎn)的選取及量測(cè)
由于歷史航片相隔久遠(yuǎn),傳統(tǒng)的野外控制點(diǎn)布設(shè)方法無(wú)法進(jìn)行。PixelGrid軟件支持在已有DEM和DOM基礎(chǔ)上,人工選取或自動(dòng)匹配控制點(diǎn),減少了對(duì)外業(yè)控制的依賴。其步驟如下:
(1)選擇與此加密區(qū)合適的年份相近的已有正射影像,同時(shí)為防止誤差積累,采用逐級(jí)控制,即新年份影像控制老年份影像,譬如用1990年代影像控制1980年代,1980年代控制1970年代。
(2)在整個(gè)加密區(qū)的四周人工選取4個(gè)控制點(diǎn),并進(jìn)行帶控制的平差解算。此時(shí)相當(dāng)于每張影像有了初始的外方位元素,因此輸入一個(gè)同名像點(diǎn),就可以預(yù)測(cè)到已有正射影像的位置(如圖4所示)。自動(dòng)選擇控制點(diǎn)的過(guò)程可以通過(guò)人工干預(yù)或自動(dòng)匹配的方法進(jìn)行。若人工選擇控制點(diǎn),按照航向5條~10條基線、旁向2條~4條航線的跨度布設(shè)平高控制點(diǎn),并應(yīng)盡量避免將控制點(diǎn)選擇在房屋等高于地面的地物上,因?yàn)榭刂泣c(diǎn)的高程是從已有DEM上讀取的,不包括房屋等的高度。
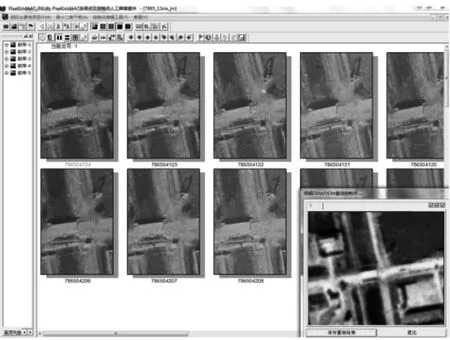
圖4 自動(dòng)預(yù)測(cè)控制點(diǎn)
3.5 絕對(duì)定向
由于資料遺失造成內(nèi)定向參數(shù)不準(zhǔn)確,控制點(diǎn)信息的不精確,平差解算過(guò)程中其限差參照相應(yīng)規(guī)范有所放大。一般要求,通過(guò)PATB平差,其中誤差不應(yīng)超過(guò)2/3個(gè)像素。
3.6 DEM匹配
天津市測(cè)繪院具備了一版高精度DEM,但是由于歷史航片相隔較遠(yuǎn),部分區(qū)域地貌發(fā)生較大變化,需要重新匹配DEM。采用PixelGrid系統(tǒng)基于多基線/多重匹配特征的高精度DSM匹配算法,自動(dòng)提取整個(gè)測(cè)區(qū)的DSM數(shù)據(jù),采用濾波算法對(duì)建筑區(qū)和樹(shù)林進(jìn)行濾波,通過(guò)少量的人工編輯獲取滿足正射糾正的DEM數(shù)據(jù)。
3.7 DOM生成
采用PixelGrid系統(tǒng)多機(jī)多核分布式并行處理功能,短時(shí)間內(nèi)完成測(cè)區(qū)內(nèi)的所有影像數(shù)字微分糾正。得到整幅影像還需對(duì)單張影像進(jìn)行勻光、勻色和鑲嵌處理,以達(dá)到較好的視覺(jué)效果。
4 成果質(zhì)量控制
數(shù)字正射影像圖的質(zhì)量評(píng)價(jià)主要包括影像質(zhì)量和位置精度兩個(gè)主要的質(zhì)量指標(biāo)。影像質(zhì)量一般包括影像分辨率和影像特性,通過(guò)人工檢查影像的分辨率、色彩、色調(diào)、反差、紋理等以達(dá)到項(xiàng)目的要求。位置精度主要指影像的平面精度,通過(guò)與1∶2000地形圖套合,其同名點(diǎn)位置中誤差在1.5m左右,滿足市情監(jiān)測(cè)需求。圖5顯示了同一區(qū)域不同時(shí)期的正射影像。
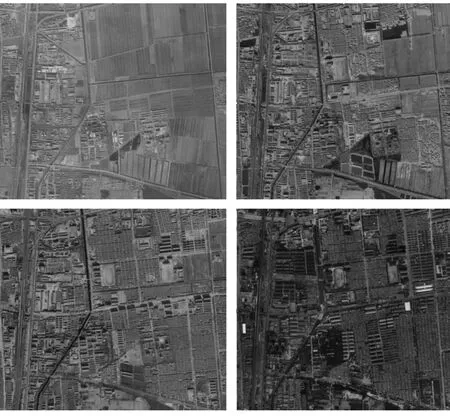
圖5 同一區(qū)域不同時(shí)期的歷史影像
5 結(jié)語(yǔ)
本文對(duì)歷史航片的數(shù)據(jù)處理方法、流程及關(guān)鍵技術(shù)環(huán)節(jié)進(jìn)行探討,并對(duì)成果精度進(jìn)行分析,其精度滿足市情監(jiān)測(cè)需求,對(duì)歷史航空影像數(shù)據(jù)庫(kù)的建立具有重要意義。如何充分挖掘歷史航片的潛在價(jià)值信息,使之服務(wù)于國(guó)情監(jiān)測(cè)等,是下一步的研究重點(diǎn)。
[1]嚴(yán)榮華,李京偉,朱武等.歷史航空影像數(shù)字化與建庫(kù)技術(shù)初探[J].遙感技術(shù)與應(yīng)用,2004,19(2):102~107.
[2]國(guó)家基礎(chǔ)地理信息中心.國(guó)家基礎(chǔ)航空攝影資料數(shù)字化與建庫(kù)項(xiàng)目黑白航片掃描作業(yè)技術(shù)規(guī)定[R].2001.
[3]張劍清,潘勵(lì),王樹(shù)根.攝影測(cè)量學(xué)[M].武漢:武漢大學(xué)出版社,2004.
[4]金為銑,楊先宏,邵鴻潮等.攝影測(cè)量學(xué)[M].武漢:武漢大學(xué)出版社,2001.
[5]張祖勛,張劍清.數(shù)字?jǐn)z影測(cè)量學(xué)[M].武漢:武漢大學(xué)出版社,2007.
猜你喜歡
心理學(xué)報(bào)(2022年4期)2022-04-12 07:38:02
水泵技術(shù)(2021年3期)2021-08-14 02:09:20
全體育(2016年4期)2016-11-02 18:57:28
當(dāng)代化工研究(2016年9期)2016-03-20 16:22:13
科普童話·百科探秘(2015年6期)2015-10-13 07:21:18
科普童話·百科探秘(2015年9期)2015-09-22 07:36:52
科普童話·百科探秘(2015年8期)2015-08-14 07:13:06
科普童話·百科探秘(2015年5期)2015-05-26 07:28:14
科普童話·百科探秘(2015年4期)2015-05-14 07:25:32
西華師范大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年3期)2015-02-27 15:31:22
