地鐵隧道結構斷面自動化測量方法及軟件研究
2012-09-22 10:30:12王昌洪劉輝鄧斌梅文勝
城市勘測 2012年6期
王昌洪 ,劉輝,鄧斌,梅文勝
(1.中鐵隧道勘測設計院有限公司,天津 300133; 2.中機三勘巖土工程有限公司,湖北武漢 430030;3.武漢大學測繪學院,湖北武漢 430079)
1 引言
城市地鐵隧道工程投資量大,施工難度大,但為節(jié)省工程造價,設計預留的結構限界安全余量往往較小。為保證結構限界滿足設計的要求,確保設備限界和運營行車限界的安全可靠,除施工時采取多種手段提高施工質量外,在地鐵隧道土建結構施工完成后,軌道鋪裝前要進行隧道結構斷面測量,以驗證土建施工后隧道結構斷面尺寸和有效凈空能否滿足設計要求。進而進行線路中線及坡度的確認和調整,確保行車限界的需求。
隧道結構斷面測量主要是獲取線路一定間隔里程上隧道結構斷面的相關尺寸,以確定結構施工是否滿足限界要求。結構斷面測量又包括線路縱斷面和橫斷面測量兩部分內容,一般縱斷面要求在線路中線上每隔一定里程間距(如6 m)設一個縱斷面點,橫斷面則要求測量與縱斷面點里程一致位置處的橫斷面相關尺寸。傳統(tǒng)隧道結構斷面測量的方法一般是先放樣出給定里程的線路中線點,測量其高程可得縱斷面,再將儀器架設在標定出的中線點上,后視前一個中線點,找出該里程線路中線(曲線為切線)的垂面,再按斷面特征,確定橫斷面上限界控制點,測得橫斷面的相關尺寸。隨著現代自動化智能型全站儀的出現,無合作目標測距及儀器自動化操控變得方便簡單,傳統(tǒng)的斷面測量模式已不能發(fā)揮現代自動化智能型全站儀的潛能。本文提出一種基于無合作目標智能型全站儀的隧道結構斷面自動化測量方法,減少了放樣的過程。利用線路中線嚴密數學模型,可實現單測站多個斷面的自動化測量,提高了斷面測量的效率和數據質量。
2 結構斷面測量技術要求
結構斷面測量的具體技術細節(jié)要求,不同的設計單位雖有小的差別,但總體基本相似。下面以武漢地鐵二號線為例說明結構斷面測量的基本技術要求。
2.1 測量基準及要求
斷面測量皆以設計線路中心線為測量基準線,左、右線均進行斷面測量。要求測量斷面頂、底點高程及其余測點的橫距。如圖1所示,頂點是指設計線路中心線在結構頂部內壁的投影點,底點是指設計線路中心線在結構底部內壁的投影點,橫距是指高于軌頂設計高程指定高度的截面上基準線至結構內壁的距離。
斷面測點的位置要求:縱向里程偏差應控制在±20 mm之內,矩形斷面高程偏差應控制在±20 mm之內,圓形斷面高程偏差應控制在±10 mm之內。
2.2 斷面測量間距
(1)沿里程增大方向,明挖法施工的直線段每隔6 m,曲線段(含曲線以外20 m直線)每隔5 m測量一個斷面;
(2)沿里程增大方向,盾構法施工的直線段每隔6 m(管片4環(huán)),曲線段(含曲線以外20 m直線)每隔4.5 m(管片3環(huán))測量一個斷面,測點為管片接縫處的突出點;
(3)曲線起點、緩圓點、中點、圓緩點、終點、聯絡線通道、人防門(防淹門)門框兩端、車站屏蔽門兩端點、折返線范圍內的中隔墻和立柱等斷面突變處及施工偏差較大段須加測斷面。
2.3 斷面測點位置
地鐵隧道采用的施工方法不同,其結構斷面形式也不相同,一般有矩形、圓形、直墻拱形和馬蹄形等多種形式,每種形式的斷面所要求的測點位置也是不一樣的。圖1是武漢地鐵二號線不同形式斷面測點位置的具體要求。
矩形隧道測點:區(qū)間隧道測量設計線路中心線處的頂點、底點,及位于軌頂設計高程以上 3200 mm、2000 mm、800 mm、0 mm的左、右橫距及其高程,測點編號分別為左上、右上、左中1、右中1、左中2、右中2、左下、右下。車站矩形隧道測量頂點、底點,及位于軌頂設計高程以上 3785 mm、1740 mm、950 mm、0 mm的左、右橫距及其高程,此外在梁頂及預埋件處增加屏蔽門測點,在站臺邊緣處增加站臺測點。
圓形隧道測點:設計線路中心線處的頂點、底點,及位于軌頂設計高程以上3490 mm、1800 mm、800 mm、0 mm的左、右橫距及其高程,測點編號同矩形隧道。圓形隧道的曲線段須增加補充測量軌頂設計高程以上4000 mm、3800 mm處的左、右橫距及其高程。
馬蹄形隧道測點:設計線路中心線處的頂點、底點,及位于軌頂設計高程以上 3600 mm、2030 mm、800 mm、0 mm的左、右橫距及其高程,測點編號同矩形隧道。
3 線路中線坐標反算
按上述結構斷面測量的基本技術要求,斷面測量的關鍵是要找到斷面測點的具體位置,其點位主要是通過以下方式組合確定:①里程。同一斷面上的測點應處于設定的某一相同里程上。②設計中線。斷面的頂、底點都是設計線路中線在結構頂、底部的投影位置。③高度。斷面左、右側的測點都是通過控制測點與軌頂設計高程的高差來確定測點位置。
1.治安管理體制改革。建議撤銷北海市公安局潿洲島旅游區(qū)辦事處,設立北海市公安局潿洲島分局。爭取自治區(qū)根據潿洲島分局承擔任務情況增核政法專項編制20名。
因此,確定斷面測點位置的關鍵在于線路設計中線平面坐標的正、反算和軌頂高程的內插計算。線路中線平面坐標正算即為求解指定里程點的平面坐標,正算公式的關鍵是將基于局部坐標系的緩和曲線坐標統(tǒng)一到線路坐標系中。根據設計的豎曲線參數,采用相應豎曲線數學模型即可計算出指定里程位置軌頂高程。這些內容在參考文獻[1]中有詳細論述。下面將介紹若給定某點坐標,如何反算出該點對應的線路里程及偏距。
線路中線坐標反算是已知點P的X、Y坐標,求里程和偏移量。如圖2所示,求P點對應垂足點的里程li和偏移量PD,應先確定P對應于平曲線的哪一部分。可先求出點P與平曲線元素各連接點的距離,找出離點P最近的一個點,如點HY,再判斷P是屬于該連接點前后兩段元素的哪一段,再計算里程和偏移量。
3.1 直線段部分
以P點為起點與線路直線段兩端點構造兩個矢量,先應用矢量叉積判斷點P是否在直線上。若點P在直線上則計算其與直線段起點和終點的距離。如果其中一個距離超出直線的長度則表示點P不屬于這段直線元素,反之點P的偏移量就為0。里程為直線起點的里程加上點P到直線起點的距離。若點不在直線上,先求出點P到直線的垂足,再計算垂足到直線起終點的距離,點P是否屬于直線的判斷方法同上。偏移量的正負可以由叉積的正負進行判斷,如果叉積小于0,則點P在直線左側,偏移量為負;反之為正。
3.2 圓曲線部分
如圖3所示,圓曲線的圓心為O,計算矢量OA與OP的叉積OAP和矢量OB與OP的叉積OBP。根據線路偏向(左偏、右偏)和上述叉積即可判斷P點垂足在圓曲線上,若線路左偏且(OAP<0或OBP>0)或者線路右偏且(OAP>0或OBP<0),則P點垂足D不在圓曲線元素范圍內。若點P垂足D在圓曲線上,求出OA與OP的夾角α,點P的里程即等于起點A的里程加上弧長l。偏移量等于OP距離與圓曲線半徑的差值。
圖3 圓曲線段坐標反算示意圖
3.3 緩和曲線部分
如圖4所示,以前半段緩和曲線為例,將坐標轉換至以ZH點為原點的獨立坐標系下,求HY點的法線單位向量,計算P-HY矢量與單位矢量的叉積,根據叉積與線路偏向,可判斷點P對應里程是否在緩和曲線范圍內。若點在緩和曲線范圍內,用雙點弦截法求出點P離緩和曲線的最近點,進而求解偏移量PD和里程li。
圖4 緩和曲線段坐標反算示意圖
3.4 緩和曲線最近點雙點弦截法求解
雙點弦截法是一種非線性方程的數值計算迭代解法,如圖4所示,通過找到緩和曲線上離P最近的點,其里程即為反算里程,緩和曲線段的反算問題實際上是一個點間距離的極值問題。
以里程li為參數,則在如圖4的局部坐標系下,前半段緩和曲線的坐標可用式(1)表達,設P點坐標為(xP,yP),構造P、D點間距離平方的函數,求一階導數得 f'(li),如式(2)。

f'(li)=0處即為極值處,雙點弦截法迭代公式如式(3)。

li∈[0,l0],可迭代求出極值處的里程,將此里程化算至線路系下即得反算里程結果,找到最近點D后,P、D點間的距離即為偏距。
4 斷面自動化測量軟件實現
利用無合作目標智能型全站儀結合上述計算方法,研制地鐵結構斷面自動化測量軟件,可實現非中線點設站結構斷面點自動化數據采集,再進行整理計算,即可自動化輸出結構斷面成果報表數據,實現結構斷面測量數據采集、處理的一體化與自動化。
4.1 斷面自動化測量流程
結構斷面自動化測量是以線路設計中線及規(guī)定的斷面測點位置為基礎,依據線路設計中線的平曲線及豎曲線參數,建立以里程為參數的設計線路平曲線及豎曲線數學模型,可正算出任意里程處的線路中線三維坐標,再根據斷面測點位置信息即可求出斷面點在設計模型下的三維坐標,此坐標可作為結構斷面自動化測量的引導坐標。由于隧道施工中各種誤差的影響,隧道最終竣工位置與設計位置存在一定的偏差,因此按引導信息確定的測點位置往往還需要進行調整。調整時根據實測坐標反算里程與高差,求出里程差及高程差,計算全站儀的微調量,引導全站儀調整到滿足里程差及高差限制要求的斷面測點位置,從而實現結構斷面的自動化測量。自動化測量流程見圖5。
斷面測量實施前應先在辦公室按設計資料輸入線路中線參數和斷面測點位置信息,準備好隧道區(qū)間聯測導線點坐標文件(地鐵隧道貫通后要求進行區(qū)間導線聯測)并導入斷面自動化測量系統(tǒng)中。現場作業(yè)時,首先,將儀器架設在施測斷面附近的聯測導線點上,進行測站設置,設置測站三維坐標、輸入儀器高、用臨近的聯測導線點后視定向;其次,設置通訊參數,建立起PDA測量手簿與全站儀之間的藍牙通訊連接;最后,指定所需測量斷面的里程,啟動自動測量,軟件系統(tǒng)在由設計模型計算出的引導坐標的引導下,驅動全站儀逐點按圖5的流程,完成指定里程斷面的掃描測量,斷面點觀測順序取決于引導坐標的計算保存順序,一般從頂部開始,順時針方向掃測。
圖5 結構斷面自動化測量流程圖
4.2 斷面自動化測量軟件
軟件基于Windows Mobile 6移動設備操作系統(tǒng)進行開發(fā),采用Visual Studio.NET 2008(Visual C#)開發(fā)平臺,軟件基于.NET Compact Framework構架,軟件可運行于PDA或智能手機等移動終端設備上(測量手簿)。測量手簿與全站儀的通訊通過藍牙進行,軟件主要包括:工程管理、通訊參數設置、中線設計、斷面測點信息輸入、自動測量、整理分析等功能模塊。軟件主界面如圖6所示。

圖6 軟件主界面
4.3 斷面測量整理成果報表
采用斷面自動化測量軟件采集斷面觀測數據后,可按規(guī)范要求自動化進行計算與整理,輸出斷面測量成果表格。表1為整理后的武漢地鐵二號線某區(qū)間斷面測量成果輸出表格。
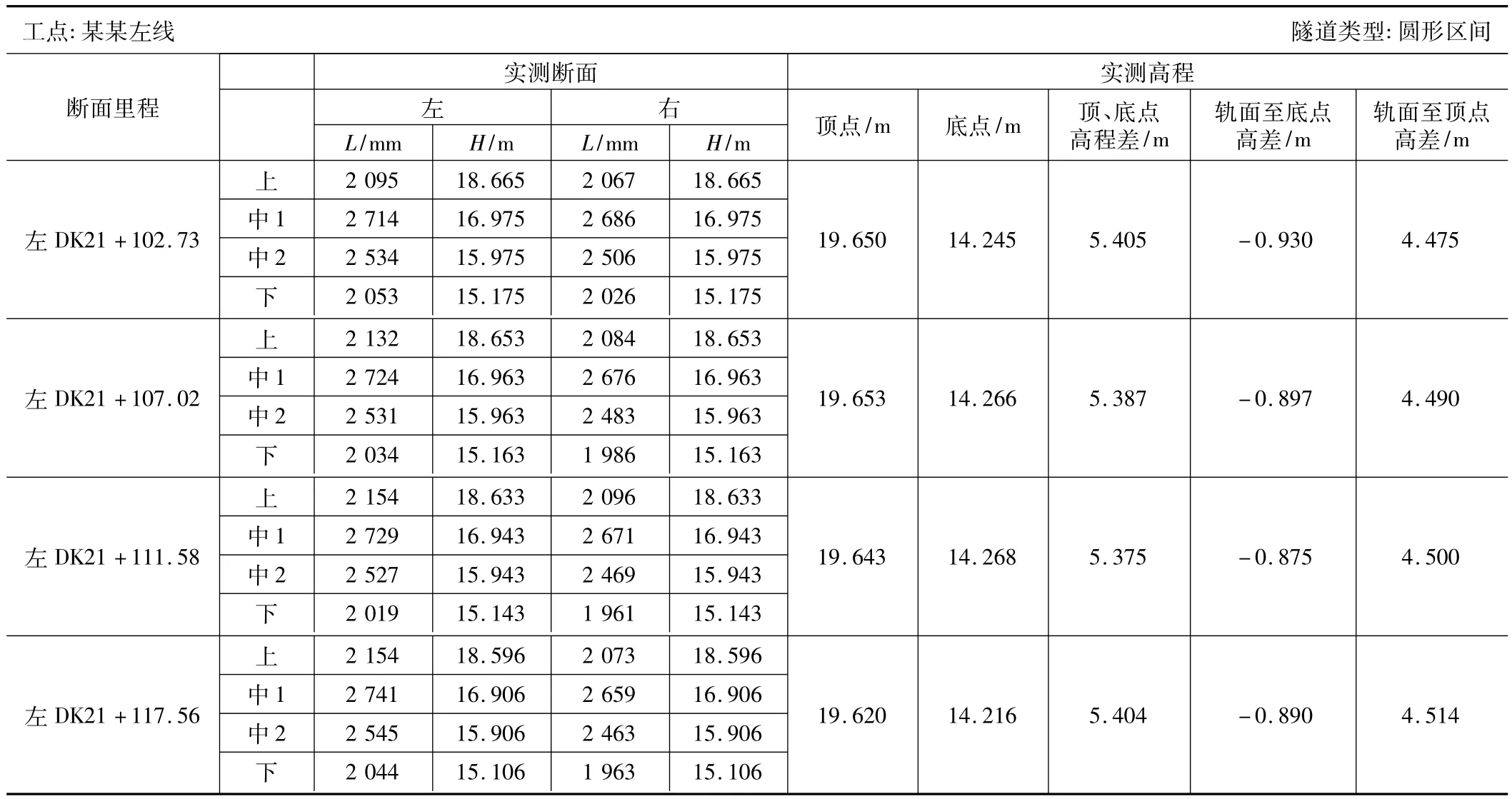
二號線某區(qū)間左線斷面測量成果表(左線) 表1
5 結語
地鐵隧道結構斷面測量是在地鐵隧道土建結構施工完成后,軌道鋪裝前必須進行的一項工作,其預留作業(yè)時間短,外業(yè)操作繁瑣,內業(yè)處理工作量大,本文提出的斷面自動化測量的方法,配合無合作目標智能型全站儀和PDA測量軟件,可以很好地解決地鐵隧道結構斷面測量中的問題,可實現結構斷面測量及數據整理的自動化,提高了作業(yè)效率,數據質量得到了有效保證。
[1]張正祿.工程測量學[M].武漢:武漢大學出版社,2006.
[2]秦長利.城市軌道交通工程測量[M].北京:中國建筑工業(yè)出版社,2008.
[3]梅文勝.基于Georobot的工程與工業(yè)測量研究[D].武漢:武漢大學,2007.
[4]GB50308-2008.城市軌道交通工程測量規(guī)范[S].
[5]王思鍇.城市軌道交通工程隧道結構斷面測量技術方法的實踐與探索[J].城市勘測,2011(1):130~132.
[6]王榮權.軌道交通工程隧道結構斷面測量技術與方法[J].鐵道勘察,2008(1):17~19.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中華詩詞(2019年7期)2019-11-25 01:43:04
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
藝術啟蒙(2018年7期)2018-08-23 09:14:18
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
