低對比度嵌入型鋼坯字符識別方法
2012-10-22 02:03:48洪漢玉俞喆俊
武漢工程大學學報 2012年12期
洪漢玉,王 澍,朱 浩,俞喆俊
(武漢工程大學圖像處理與智能控制實驗室,湖北 武漢 430205)
0 引 言
鋼鐵行業的智能化發展日新月異.由于傳統的噴印型字符(見圖1(a))在運輸與存放過程中容易因外界原因導致損毀,造成字符識別工作中出現非算法原因的檢測錯誤,嚴重影響了實際檢測的穩定性,于是嵌入型鋼坯字符被提出運用到實際生產中去.嵌入型鋼坯字符(見圖1(b))在鋼坯出爐階段由機器打印嵌入鋼坯母體,能夠長時間穩定地保持字符特征,對鋼坯生產線的智能管理有著長遠的意義.在新型生產線上,已實現對鋼坯端面的精準定位,將圖像鎖定在端面范圍內,工作的重點是對鋼坯端面上字符信息的提取.由于嵌入型鋼坯字符區域對比度很低,灰度值與端面背景基本一致,使得傳統的遞歸分割方法無法完成其字符信息的提取工作,因此對字符邊緣輪廓信息的提取是解決問題唯一的途徑.輪廓提取工作的主要困難是由嵌入型鋼坯號邊緣本身較低的對比度、打印時形成的無效邊緣及鋼坯端面過多的背景噪聲帶來.用于邊緣信息檢測的經典方法有:Marr 和 Hildreth提出的LoG算子[1-3],John Canny提出的Canny算子[4]等.上述方法是基于實際邊緣的邊緣檢測算法,對有特定提取要求的圖像有很大的局限性,運用于嵌入型鋼坯號輪廓提取的結果很不理想.
針對上述問題,利用基于輪廓測度的LoG算子獲得閉合的字符輪廓信息,將閉合區域填充后對提取出的候選區域建立定量篩選模型,根據字符與非字符區域形態學特征上的差異提取出目標字符區域.研究結果表明,基于輪廓測度的LoG算子有著很好的穩定性和準確性,解決了低對比度條件下嵌入型鋼坯字符提取的關鍵技術問題.
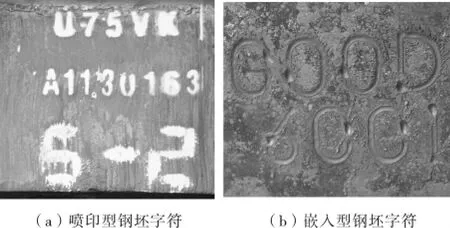
圖1 噴印鋼坯字符與嵌入型鋼坯字符Fig.1 Printed billet characters and embedded billet characters
1 嵌入型鋼坯字符邊緣的檢測
1.1 基于輪廓測度的LoG算子
高斯型拉普拉斯算子(Laplacian of Gaussian)主要利用圖像二階導數的零交叉點來獲取圖像邊緣,檢測到的邊緣強度較好,但對有特定提取要求的圖像有較大的局限性.鋼坯字符主要由阿拉伯數字與英文字母組成,其信息主要分布在水平、豎直和傾斜的幾個大方向,對此提出了基于輪廓測度的LoG算子.
LoG算子的主要原理是把拉普拉斯算子與高斯平滑[5]濾波器結合起來進行邊緣檢測.首先對圖像進行高斯平滑濾波,再對濾波過后的圖像求二階導數的零交叉點來確定圖像的邊緣.二維高斯函數和它的二階偏導如式(1)所示:

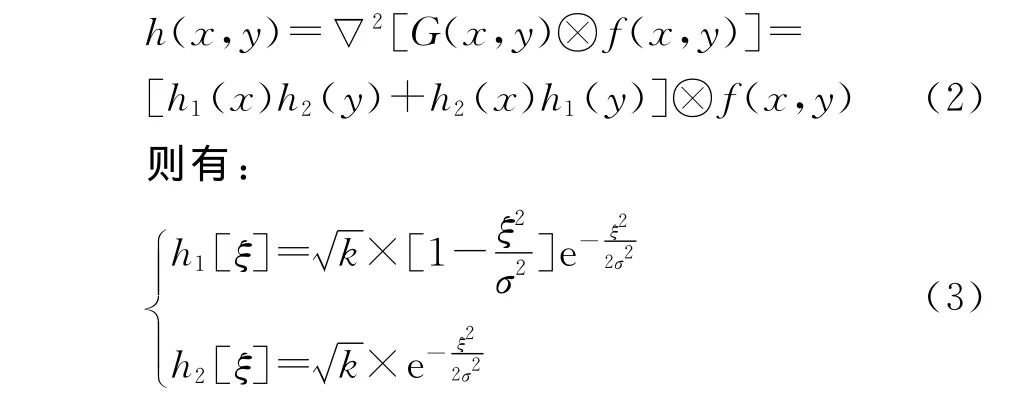
輪廓的測度主要體現在圖像與濾波器作卷積的模版選取上.根據公式(4)對原圖f(x,y)取水平與豎直,傾斜45°與傾斜135°的卷積模版分別與h1(x)h2(y)+h2(x)h1(y)作卷積:

其中,i的取值為1與2兩個數,則有:

1.2 零交叉點檢測
圖2(a)為在方向D上一個理想的邊緣狀況的示意圖,在邊界點灰度值從a躍升到b.通過LoG算子進行卷積處理后,求取到圖像的二階導數,邊緣情況如圖2(b)所示.圖像邊緣情況表現為零交叉點:低灰度值部分h(x,y)>0,高灰度值h(x,y)<0,相素的值分布在0上下較小的范圍內.
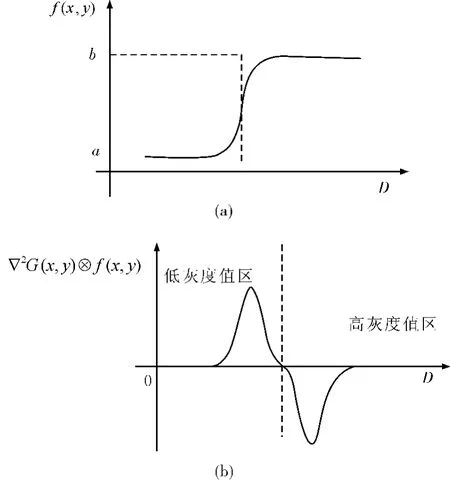
圖2 基于LoG算子的邊緣響應示意圖Fig.2 Response of edges to LoG masks
基本的零交叉點檢測方法為如相鄰2個相素點的符號異同或者如當前點像素值為0,并在其四領域中有兩個像素符號相反,則定義像素值絕對值最小的點為邊緣.本文采用基于Predicate的3×3鄰域謂詞模版[6],將其與定義好的4種中不同情形的模版相比較,如果匹配就在正確的相素位置上確定邊緣.
在對卷積圖像中零交叉點的檢測即是邊緣檢測.因此,通過以上的處理可獲得鋼坯字符的邊緣輪廓信息.目標區域基本信息的完好表達與對背景噪聲的有效抑制是邊緣提取的基本要求.
2 字符信息的提取
2.1 區域填充與形態學去噪
通過對零交叉點的檢測,獲得閉合的邊界輪廓.通過極點判別法[7]對閉合的輪廓區域進行填充,基本原理是經輪廓跟蹤得到輪廓點,利用輪廓點與其前后鄰點的位置關系將輪廓分為極點和非極點,再對掃描線上的非極點進行兩兩配對和填充.
由于端面圖像定位的關系,有時檢測出的圖像中會出現端面的邊界,并且鋼坯字符在打印時會形成一些無效的邊緣.所以待處理的噪聲主要可分為端面的邊界、端面上的離散噪聲和無效邊緣.按照文獻[8]中基于聯通域算法的區域測量思想,根據填充后噪聲區域與字符區域形態學特征上的區別提出了適用的去噪方法,基本原理如公式(6)所示:
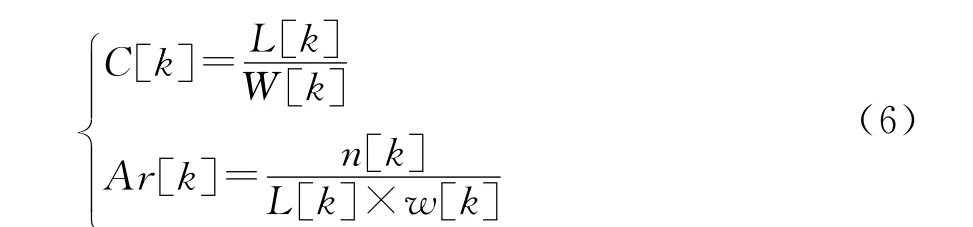
其中C[k]為當前聯通域的長寬比,L[k]為聯通域長度,W[k]為聯通域寬度,n[k]為聯通域中相素個數.當C[k]滿足給定條件時,計算此聯通域的相素比重Ar[k],將Ar[k]與設定的閾值作比較,判斷其是否為噪聲,從而提取目標字符區域.
2.2 字符標準化
通過上述步驟得到基本的字符信息后,通過基于智能多代理的字符切分處理方法[9]對字符進行切分,然后通過形態學處理將切分后的字符變為標準字符.根據標準字符模版的對應信息即可獲得圖像中的字符信息.字符標準化的主要步驟為:1)從輸入的字符中心處將其等分為四分,取每部分的形心為基準往周圍上下左右四個方向投影.2)根據投影的情況結合字符形態學規律進行判斷,得到標準化字符.最后根據標準化字符對應的數字模版完成識別工作[10].
3 實驗結果與分析
上述算法在計算機(3.09GHz,3.2GB)上使用VC+ +6.0編程,利用灰度CCD相機(相機型號:MVC900DAM-GE30-01Y23)采集圖像.為驗證算法的性能進行了噴印型鋼坯字符與嵌入型鋼坯字符的分割對比、嵌入型鋼坯字符的輪廓提取、目標區域提取等實驗,并對算法的性能進行了測試與分析.
實驗一:字符分割對比試驗.在傳統的噴印型鋼坯字符檢測上,采用的是局部遞歸分割算法[11].圖3(a)為端面背景較為復雜的噴印型鋼坯字符,通過多級分割濾波處理鋼坯字符被完整的表達出來,結果如圖3(e)所示.圖4(a)為嵌入型鋼坯字符,從其遞歸分割的主要過程可以觀察到鋼坯字符區域始終沒有被有效地分割出來.實驗結果表明此方法并不適用于嵌入型鋼坯號.
實驗二:字符輪廓信息的提取.圖5(a)是分辨率為1248×832的鋼坯端面灰度圖像,對其運用Canny算子、LoG 算子、DoG 算子[12-13]及提出的方法進行嵌入型鋼坯號輪廓提取實驗.圖5(b)為運用了Canny算子對原圖進行輪廓提取的結果,可以觀察到該算子對噪聲敏感度較高,信噪區分度過小.圖5(c)為運用LoG算子進行處理的結果,從圖5(c)中可以發現高斯平滑對噪聲具有較好的抑制效果,但同時也削弱了字符邊緣信息,關鍵區域的輪廓信息缺失嚴重.圖5(d)為使用DoG算子對原圖處理的結果,DoG算子的主要原理是對圖像求取兩個高斯函數的差值,從圖5中可以觀察到雖然字符邊緣輪廓信息提取得較好,但不能有效地將字符輪廓與噪聲邊緣分離.圖5(e)中運用的是本文提出的基于輪廓測度的輪廓提取方法,可以觀察到字符輪廓的信息表達基本完整,與噪聲區分度大,能夠滿足后續對字符提取工作的要求.
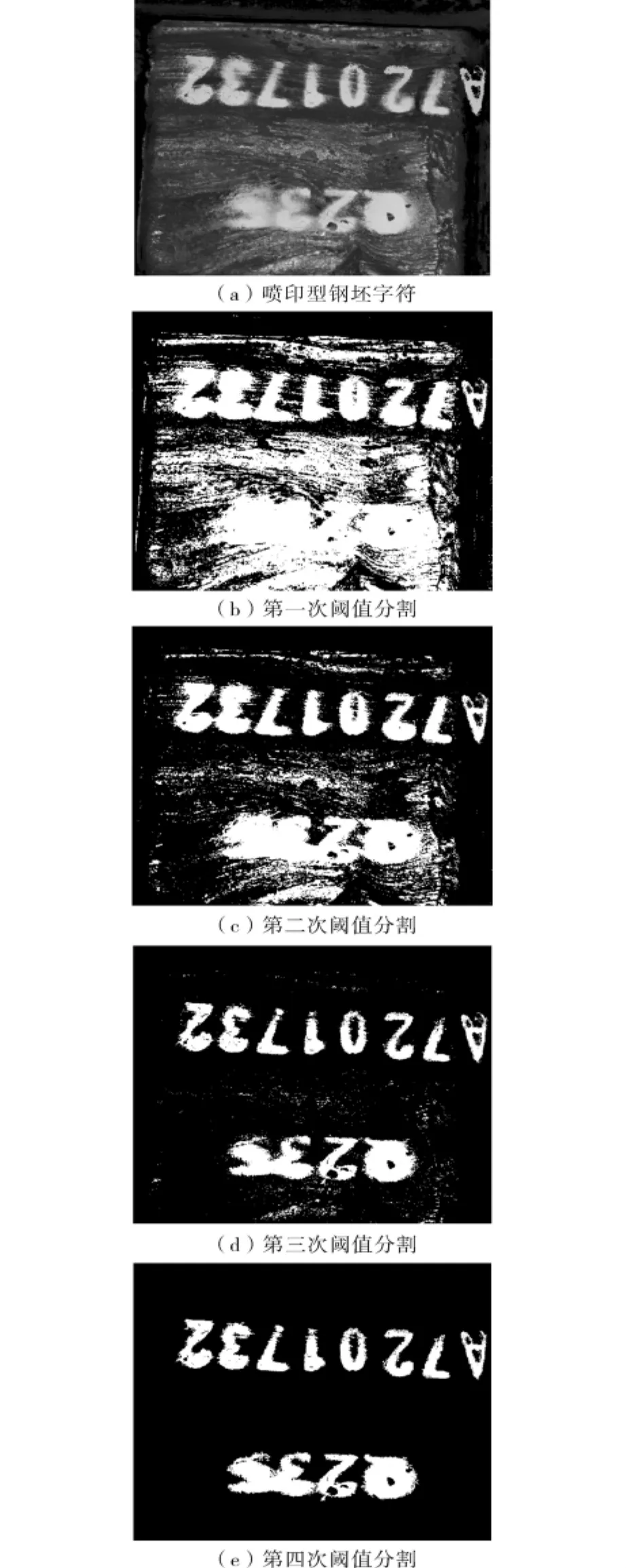
圖3 噴印型鋼坯號遞歸分割示意圖Fig.3 Recursive segmentations of printed billet characters
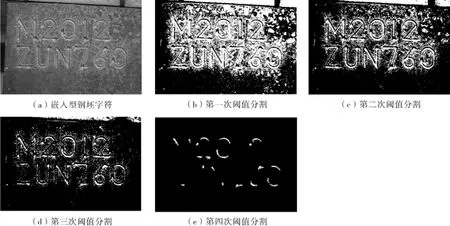
圖4 嵌入型鋼坯號遞歸分割示意圖Fig.4 Recursive segmentations of embedded billet characters
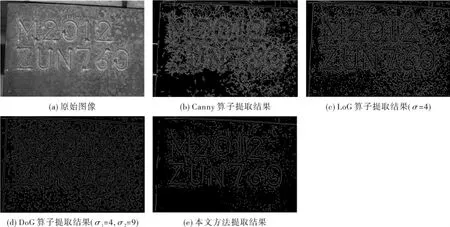
圖5 輪廓提取比較Fig.5 Comparison of edge detection methods
實驗三:區域填充與目標提取.如圖5(d)所示,因為改進的LoG算子提取出的字符輪廓區域為閉合輪廓區域,所以在此基礎上可對其進行區域填充,圖6(a)為填充的結果.根據公式(6)計算每個聯通域的長、寬、長寬比、面積與面積比重,通過設定的對應閾值將單個分離的噪聲聯通域消除,保留字符聯通域.圖6(b)為字符提取結果.表1為對待處理的聯通域的分類與形態學特征的統計與分析,通過對離散噪聲、端面邊緣、無效字符邊緣及目標字符邊緣區域的數據分析:字符區域的提取閾值 C[k]應取 0.15/3.0 或者5/7.5;Ar[k]應取0.15/0.3或者0.5/0.8.
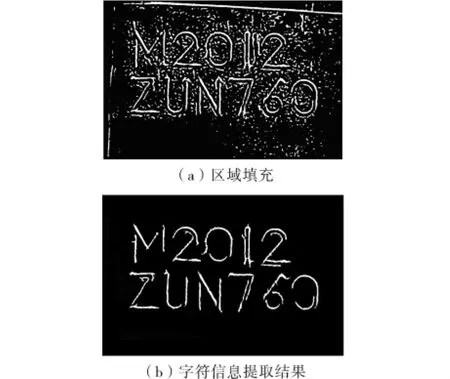
圖6 區域填充與去噪Fig.6 Region filling and extraction results

表1 聯通域域特征分析Table 1 Analysis of connected domain
實驗四:字符的切分與標準化處理.得到基本的字符信息后,首先要對其進行分割與切分獲取單個字符,其次分別對單個字符進行標準化處理,最后對照標準化字符的模版完成識別工作.圖7(a)為字符的切分結果與標準化的效果,圖7(b)為軟件的識別結果.
實驗五:算法性能測試.圖8(a)為試驗中所采用的嵌入型鋼坯端面圖像;圖8(b)為運用本文方法提取的結果.表2為對相機采集的隨機100張圖像進行識別測試的結果.通過測試可知,在實際運行中算法表現優異,魯棒性強,運行時間能夠滿足實際工程需要(鋼坯生產線上的實際檢測周期為10s).
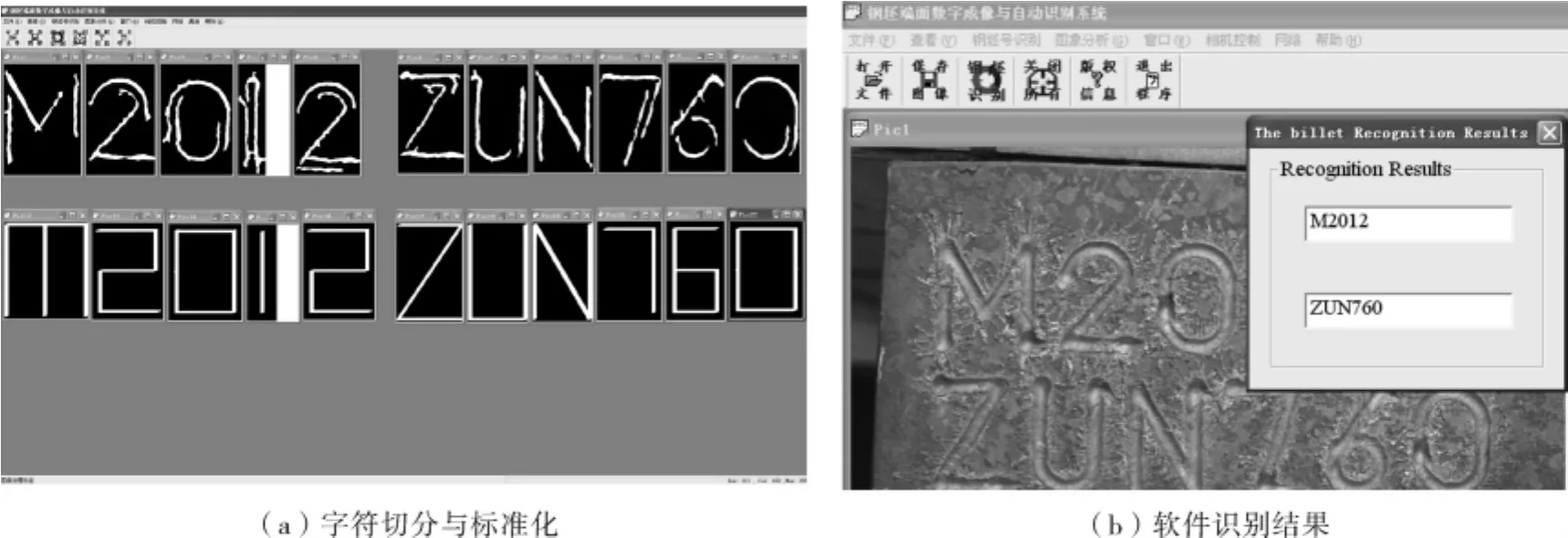
圖7 字符的標準化與識別Fig.7 Billet character extraction
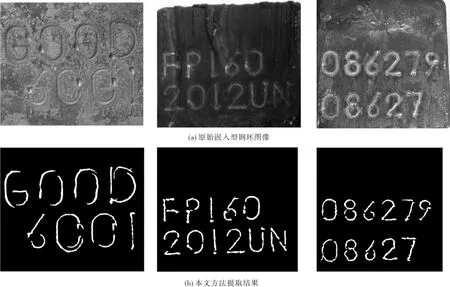
圖8 典型的嵌入型鋼坯字符圖像的檢測結果Fig.8 Detection results of some typical images

表2 字符識別率測試Table 2 Character recognition test
4 結 語
以上針對嵌入型鋼坯字符對比度很低、邊緣干擾信息強的特點,將基于輪廓測度的LoG算子運用于嵌入型鋼坯字符圖像的輪廓信息檢測中.結合區域填充算法并通過區分度高的形態學特征進行了字符信息的提取.實驗結果表明,本文檢測方法識別效率高、參數較少、抗噪聲邊緣干擾性強,可以準確的提取出圖像中的字符信息,且對鏡頭焦距長短和傾斜角度要求較小.檢測結果保留了原有的字符特征,并擁有字符各自的位置和形態特性,解決了將嵌入型鋼坯字符應用于實際生產線的關鍵技術難點.
[1]Ulupinar,Faith.Refining edges detected by a LoG operator[J].Computer Vision Graphics Image Process,1990,51(3):275-298.
[2]Oie,Takhiro.Adaptive Laplacian-Gaussian filter method for edge detection and diameter estimation of coronary arteries on cineangiograms:Applications to phantom profiles[J].Stems and Computers in Japan,1992,23(12):55-65.
[3]賀強,晏立.基于LOG和Canny算子的邊緣檢測算法[J].計算機工程,2011,37(3):210-212.
[4]Accame,Marco.Edge detection by point classification of Canny filtered images [J]. Signal Processing,1997,60(1):11-22.
[5]張天序.成像自動目標識別[M].武漢:湖北科學技術出版社,2005.
[6]Andres Huertas,Gerard Medioni.Detection of intensity changes with subpixel accuracy using Laplacian-Gaussian Masks[J].IEEE Transaction Pattern Analysis and Machine Intelligence,1986,8(5):644-651.
[7]吳章文,楊代倫.區域填充極點判別算法[J].計算及輔助設計與圖形學學報,2003,15(8):979-983.
[8]李儀芳,劉景琳.基于連通域算法的區域測量 [J].科學技術與工程,2008,9(8):2492-2494.
[9]洪漢玉,楊義軍.基于智能多代理的復雜場景鋼坯字符切分算法[J].光電工程,2012,39(5):91-100.
[10]楊義軍,洪漢玉,章秀華,等.重軌生產線鋼坯字符識別方法 [J].武漢工程大學學報,2012,34(5):64-67.
[11]洪漢玉,俞喆俊,章秀華.復雜光照條件下鋼坯字符檢測方法[J].武漢工程大學學報,2012,34(6):65-68.
[12]洪漢玉.現代圖像圖形處理與分析[M].武漢:中國地質大學出版社,2011.
[13]VanVliet,LucasJ.Edge localization by MoG filters:multiple-of-Gaussians[J].Pattern Recognition Letters,1994,15(5):485-496.
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
海峽科技與產業(2016年3期)2016-05-17 04:32:12
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
