一種振搖式紅棗采收設備設計與仿真
2012-11-12 07:04:14黃俊清范修文廖結安
塔里木大學學報 2012年4期
黃俊清 王 偉 范修文 廖結安
(塔里木大學機械電氣化工程學院,新疆 阿拉爾 843300)
目前,我國果園收獲主要靠人工手摘和借助云梯、采果刀等簡單工具輔助采收。林果采收機械的研究在我國仍處于起步階段,成熟先進的實用機具報道很少[1-4]。隨著新疆特色林果,尤其是紅棗等林果的規模化、產業化發展,依靠簡單的人工采收的方式已不能滿足紅棗等產業化生產的需要。2 007年,新疆農墾科學院機械裝備研究所研制了4YS-24 型紅棗收獲機[5],采收效果受到紅棗矮化密植的影響,機械設備無法進入棗園,后續清理還是需要人工拾取,采收效果不理想,推廣遇到很大困難,過度的振搖樹干致使棗樹出現大面積死亡現象。新疆各地州發展紅棗的計劃面積為1 600-1 800 km2,各地州根據實際情況確定了紅棗產業的重點發展縣。近年隨著南疆地區紅棗種植面積快速增長,每年到紅棗收獲季節,對人工需求特別旺盛,導致紅棗收獲成本劇增,棗農的種植成本就會出現大幅度增加;一旦遇到陰雨天氣,大量紅棗來不及采收,淋雨后的紅棗無論是在樹上還是在地上都會出現大量腐爛;阿拉爾墾區2010年紅棗收獲期降雨,沒有采收完畢的紅棗都出現50%的腐爛。因此研制一種高效紅棗采收設備是很迫切的需要。
1 振搖式紅棗采收設備的結構組成與工作原理
1.1 振搖式紅棗采收設備的結構組成
根據新疆南疆地區紅棗種植矮化密植的特點,確定采收設備需具備的基本條件是采收過程振幅小,移動方便,采摘過程對樹枝和果實的損傷小;同時要求采收設備設計簡單,經濟實用,操作簡便。紅棗采收設備結構簡圖如圖1 所示,紅棗采收設備主體結構由可調搖桿(3)、圓形網(5)束緊繩機構(2)組成。圓形網由圓形帆布、漏棗口、加強連接帆布構成;束緊繩機構由連接繩、束緊繩導管、束緊裝置、可調束緊帶組成。

圖1 紅棗采收設備結構簡圖
1.2 振搖式紅棗采收設備工作原理
紅棗采收設備設計工作原理是通過固定四個可調搖桿提起圓形網式結構,將圓形網把整棵棗樹枝干從上往下包住,松開長桿,圓形網自由下落,利用圓形網下端收攏機構收緊圓形網,通過束緊機構固定樹干上,束緊位置高于網自由下落最低位置100 mm,利用四根可調搖桿帶動圓形網搖動,圓形網帶動樹枝振動,使樹上紅棗落入網的底部,振搖結束,打開紅棗漏棗口,通過漏棗口將紅棗倒入框中,從而完成一個樹的紅棗收獲。

圖2 紅棗采收示意圖
1.3 振搖式紅棗采收設備的結構仿真
設計思路、結構尺寸確定后,用三維制圖軟件Pro/E 繪制出三維模型如圖3 所示。
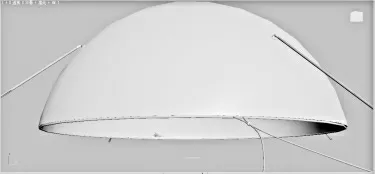
圖3 振搖式紅棗采收設備三維模型圖
2 振搖式紅棗采收設備主要部件設計
2.1 圓形網的結構與材料選擇
圓形網的結構組成包括,密封的圓形網、漏棗口、束緊繩、連接繩,裝配示意圖如圖4 所示。密封的圓形網袋直徑大小是根據棗樹枝葉圍成的表面積估算得到,采用密封的圓形網是為了避免棗樹枝葉卡在網上不能快速實現網與樹的分離,避免分離時用力過大損傷棗樹;漏棗口可以讓落在網底的紅棗能夠方便的倒入框中。網與搖桿連接處用雙層網結構,提高其使用強度,避免長時間使用作用力集中導致網破損。

圖4 紅棗采收設備裝配示意圖
2.2 圓形網的收緊機構設計
圓形網的收緊機構類似于運動褲的收緊帶,由束緊繩、束繩裝置、圓形網圓形孔構成,束緊繩使用長纖維的布料,面料光滑柔軟,摩擦系數小,耐磨性高,強度彈性都很好質地緊密且富有彈性;長度因圓形網罩網的半徑而定,但總長要比圓形網的最外端周長要長100 cm,繩直徑8 mm。束繩裝置結構簡圖如圖5 所示。
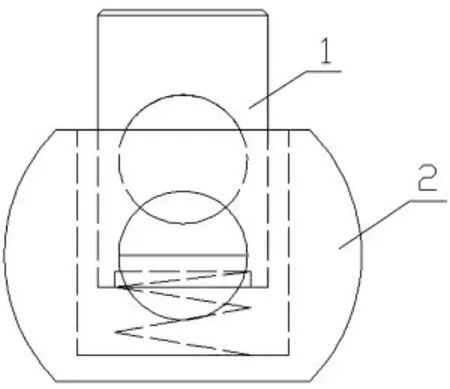
圖5 束繩裝置結構簡圖
束繩裝置工作結構組成是移動件(1)、固定件(2)和彈簧組成,移動件在固定件內,移動件和固定件之間有一個彈簧,在彈簧的作用下,移動件始終有向上的趨勢;束緊繩同時通過移動件和固定件的孔洞,擋住了移動件向上的趨勢,二者相互作用下,達到了束緊的目標。擬采用ABS 塑料鑄成,ABS 塑料是由丙烯腈、丁二烯、苯乙烯聚合的塑料,它色彩醒目,耐熱、堅固。
網的收緊機構類似于運動褲的收緊帶,不同之處是網的收緊機構承受的作用力大,在設計過程為防止其松開導致紅棗落地,設計一個可調束緊帶,主要由一個自鎖裝置和鋸齒形束緊帶構成。鋸齒形束緊帶通過自鎖裝置,在自鎖裝置內扭矩彈簧提供一個扭力,卡死束緊帶,使束緊帶只能緊不能松,達到束緊樹干的要求。根據工作實際需要,為了降低成本,可調束緊帶的材料選用塑料。
2.3 可調搖桿設計
可調搖桿均勻分布圓形網的四周,通過固定繩固定在圓形網的加強位置,上網時,通過搖桿支撐、導引圓形網上樹,均勻下落罩住棗樹的枝干;利用收緊機構收緊圓形網,利用搖桿人工(后續設計機械搖動)搖動罩住部分,通過搖桿的振動帶動網罩振動,帶動罩子晃動,罩子晃動帶動樹枝晃動;樹枝在接受了外加的強迫振動后,也以一定的頻率振動,這樣就使樹枝上的棗子振動而加速運動。加速運動的棗子要受到慣性力的作用,當慣性力大于棗子與樹枝的結合力時,棗子就會掉落到罩子底部,達到收獲紅棗的效果。根據棗樹的高度的不同,為了方便使用,采用可調搖桿;搖桿主要有五個部分組成:定位滑塊、底座、外管、內管、連接頭。外管直徑為25 mm,內管直徑23 mm,將內管放入外管內,相應的孔洞對齊,在彈簧作用力下,定位滑塊始終處于頂起狀態,滑塊和內外管的相互作用力,達到定位目的,滑塊可以通過彈簧壓縮和任意的外管孔洞配合,從而達到可調高度的目的。
3 結論
本文根據新疆南疆地區紅棗種植特點以及收獲的需要,完成了一種半機械化紅棗采收設備理論設計,并利用三維軟件對設計結構進行實體仿真,仿真結果顯示在整機機構中的各部件之間沒有發生干涉現象;設計結果理論上可行;后續研究一方面需要通過制造實體進行試驗研究。如有可能可以在微型拖拉機的帶動下進行紅棗采收工作。
[1]白瑞甫,李永貴.兵團紅棗產業發展問題分析[J].產業市場2010,74(5):42-44.
[2]刁海林,袁東,蔡道雄.便攜式棕櫚藤采收機設計[J].機械與裝備,2011.10:54-56.
[3]武婷.我國紅棗產業在遭受陰雨重災后持續發展的建議[J].農業科技管理2008,27(6):31-33.
[4]湯智輝,賈首星,沈從舉.新疆兵團林果業機械化現狀與發展[J].農機化研究,2008(11):5-8.
[5]湯智輝,沈從舉,孟祥金,等.4YS 一24 型紅棗收獲機的研制[J].新疆農機化,2010,1:30-31.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
哲學評論(2021年2期)2021-08-22 01:53:34
四川文學(2021年4期)2021-07-22 07:11:54
中華詩詞(2019年7期)2019-11-25 01:43:04
電子制作(2018年11期)2018-08-04 03:26:08
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
工業設計(2016年12期)2016-04-16 02:52:00
現代企業(2015年9期)2015-02-28 18:56:50
絲綢之路(2014年9期)2015-01-22 04:24:46
消費者報道(2014年7期)2014-07-31 11:23:57
