基于蛇怪蜥蜴踏水機理的水面推進技術研究
2012-11-20 10:03:28白向華呂建剛趙志寧
實驗流體力學 2012年6期
關鍵詞:分析
白向華,呂建剛,高 飛,趙志寧
(1.軍械工程學院,石家莊 050003;2.總參炮兵訓練基地,河北 宣化 075100)
0 引 言
目前,世界現役兩棲車輛水上推進速度一般低于15km/h,主要原因為現役兩棲車輛均為排水型,排水型車輛航速接近15km/h時,會出現“阻力墻”現象,導致水阻力急劇增大,如圖1所示[1]。即使大幅度提高發動機輸出功率,水上推進速度也很難進一步提升[1-2]。因此,如何減小水面阻力是提高兩棲車輛航速的重要途徑。
國內有關減阻文獻[3-7]主要從改變兩棲車輛形狀,如添加前后防浪板、車輪懸掛、改變車首角度等方式減少航行阻力,但車輛整體上還處于排水狀態,“阻力墻”現象仍舊無法克服。
美軍新一代EFV 遠征戰車水上最大航速達到46.6km/h,是傳統兩棲車輛航速的3 倍多[8]。究其原因為:EFV 遠征戰車水上行駛時將會變成一個大型沖浪滑板,加上超大功率的噴水推進器,使車體完全進入滑行航態,從而越過“阻力墻”,大大減小水阻力,實現高速航行,如圖2[1]。
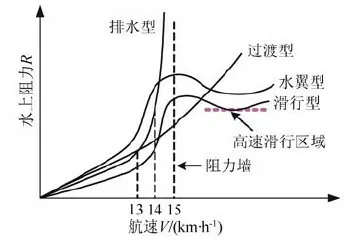
圖1 不同航態兩棲車輛的阻力曲線比較Fig.1 Resistance curves comparison of amphibious vehicle on different sailing status
由此可見,改變兩棲車體水中航態,使其由排水狀態經過渡狀態、最終進入高速滑行狀態(如圖1所示),是解決目前兩棲車輛因" 阻力墻" 而航速過低的有效方法。
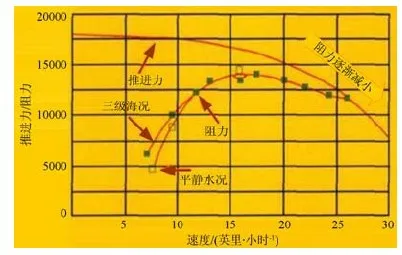
圖2 EFV 流體阻力-速度曲線Fig.2 Liquid resistance-velocity curves of EFV
1 推進技術研究
1.1 滑行航態分析
根據航行原理,水面航行船(車)體的運動狀態劃分主要取決升力相對于排水量的大小。當車輛航速的體積弗勞德數Fr>3.0時稱為滑行狀態,在這種狀態下航行時,車體幾乎離開水面,浮力很小,其重量的90%與流體動力作用相平衡[9]。滿足近似式

式中:m為車體質量,Rg為流體動力產生的升力。
此狀態下,車體被高速航行產生的水動力托出水面,水阻力保持在一個穩定狀態,如圖1所示。除非具有專門的車體外形(如EFV 滑板型車底,圖3 所示)和超大功率發動機,可以實現水上高速滑行狀態(圖4所示);否則,對于傳統排水型車輛(圖5所示)很難實現這種水上高速滑行狀態。
1.2 仿生分析

圖3 EFV 滑板型車底Fig.3 Smooth-board shape of EFV bottom

圖4 EFV 托出水面高速滑行狀態Fig.4 High speed sliding status above water of EFV
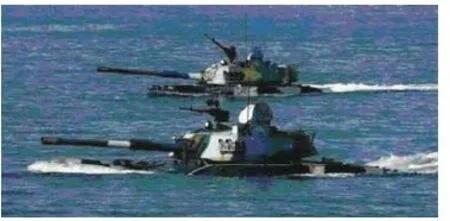
圖5 傳統排水型兩棲車輛水中航行狀態Fig.5 Sailing status in water of traditional drainage amphibious vehicle
現代仿生技術為突破傳統排水型車輛的“阻力墻”現象帶來靈感和希望。美洲熱帶雨林生活的蛇怪蜥蜴[10-11]是一種能夠在水面高速奔跑的動物,身體密度大于水,經過上億年的進化,其能夠依靠兩個腳掌高頻率地踩踏水面,實現在水面上的高速奔跑,如圖6所示。它利用兩個腳掌面積以合適的角度、高頻率踩踏水面,產生向前的奔跑力和向上的托舉力,使得蛇怪蜥蜴在水面奔跑如履平地。

圖6 蛇怪蜥蜴高速踏水奔跑過程Fig.6 Course of basilisk lizard treading water at high speed
此向上托舉力的產生機理與艦船、兩棲車輛阿基米德排水浮力原理有本質的不同,它揭示了這樣的一個重要原理:在高速條件下,固體和液體的相互作用實質上與固體和固體的相互作用相同,會產生極大的作用力。我們可利用這一機理進行兩棲車輛航態改變技術研究。
1.3 推進原理分析
通過觀察和分析蛇怪蜥蜴的水上高速奔跑過程,深入研究蛇怪蜥蜴在水面奔跑時流體和固體相互作用的動力學原理,拋棄以往兩棲車輛排水型浮力方式,在仿真分析和原理試驗基礎上,提出了一種新型兩棲車輛推進技術。
基于此技術設計了一種輪-葉復合式推進裝置。首先,它與傳統兩棲車輛阿基米德體積排水產生浮力原理不同,其實質是利用仿生葉輪葉片高速連續地拍擊水面,產生向上托舉力F1和水平推進力F2,隨著葉輪轉速的提高,產生固-液作用力不斷增大,將兩棲車輛托舉出水面,進入滑行狀態,從而避開“阻力墻”達到減小水阻力的目的,基本原理如圖7所示。
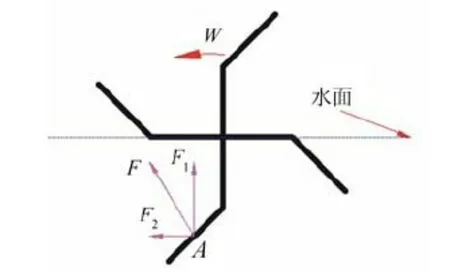
圖7 輪-葉復合式推進裝置基本原理圖Fig.7 Basic principle diagram of the wheel-blade compound propulsive equipment
1.4 仿真分析
為驗證設想裝置的作用效果,課題組人員應用流體仿真軟件Fluent中的動網格技術,VOF 模型及UDF函數對新型輪-葉復合式推進裝置水動力性能進行運動仿真,先從理論上驗證減阻推進技術的可行性。
(1)應用Pro/E軟件建立推進裝置三維造型,采用GAMBIT 軟件進行網格劃分,如圖8所示。
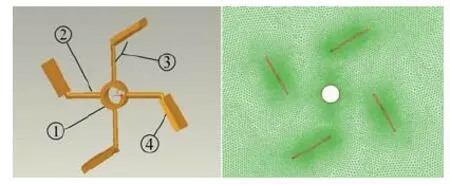
圖8 輪-葉復合式推進裝置三維造型和網格劃分Fig.8 Three dimensional sculpt and gridding partition of the wheel-blade compound propulsive equipment
(2)將輪-葉復合式推進裝置的旋轉運動視為二維不可壓非定常流動,采用時均形式的連續方程,Reynolds時均Navier-Stokes方程和標量φ的時均輸運方程,描述為:

式中:ui,uj為速度分量時均值(i,j=1,2);p為壓力時均值;ρ為流體密度;μ為流體粘性系數;為雷諾應力項;φ為通用變量;Γ為廣義擴散系數;S為廣義源項。
其中,非定常湍流計算采用RNGκ-ε湍流模型[12],該模型很好地處理高應變率及流線彎曲程度較大的流動。利用UDF 定義輪-葉復合式推進裝置角速度ω=5rad/s;在初始化過程中將上半部分設為空氣,下半部分為水。
設葉輪旋轉軸中心與水平面距離為浸水深度h,連接桿與葉片夾角為θ。分析在不同浸水深度h或夾角θ下,輪-葉復合式推進裝置的水動力性能。
(3)首先設輪-葉復合式推進裝置浸水深度為h=-0.4m(完全處于水下),θ=120°,仿真分析此狀態下的水動力性能,如圖9~11所示。

圖9 下潛狀態產生的托舉力和推進力Fig.9 Propulsive force and lift force when submerging
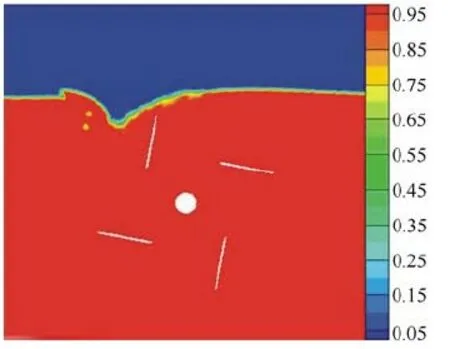
圖10 下潛時的體積分數分布圖Fig.10 Volume fraction distribution when submerging
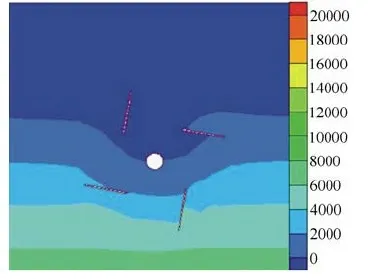
圖11 下潛時的壓力云圖Fig.11 Pressure nephogram when submerging
如圖9中所示,選取0~1.65s內1650個時間節點,仿真得出各時間節點輪-葉復合式推進裝置的力學特性,其中上半部分為托舉力,下半部分為推進力。可以看出,推進裝置在完全置于水下(圖10顯示此時葉輪的水中狀態)旋轉時,產生近似正弦或余弦的向上托舉力和向前的推進力,兩者呈周期性波動。其中托舉力最大值為513.29N,推進力最大值達到451.65N,并且托舉力和推進力大部分處于正值范圍內,由此可見通過仿生葉輪轉動,可實現車體從水下托出水面,進入滑行狀態。圖11為0.75s時刻各仿生葉片的壓力云圖。兩側壓力差對葉片面積的積分即為單個葉片受力大小,進而可求整個仿生葉輪所受到的托舉力和牽引力。
(4)仿生葉輪浸水深度h分別為-0.20m、0m、0.2m(處于水-氣兩相介質中),夾角θ=120°時,仿真分析推進裝置的水動力性能,如圖12和13所示。

圖12 不同浸水深度產生的托舉力Fig.12 Lift force at different deepness in water
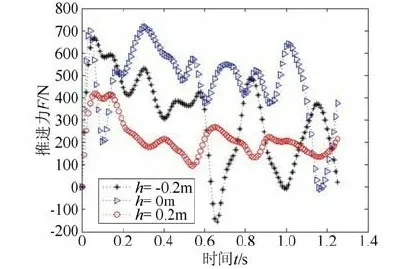
圖13 不同浸水深度產生的推進力Fig.13 Propulsive force at different deepness in water
從圖14和15分析得出,在一個旋轉周期內,h=0m 時產生的平均推進力和托舉力均最大,h=-0.2m、0.2m 時相對較小,其中牽引力在h=0.2m 時最小。這是由于此狀態下仿生葉輪拍打的水體積較少,故作用力較小,與實際相符。
(5)設仿生葉輪浸水深度h=0,夾角條件θ為105°、120°和135°時,仿真分析推進裝置的水動力性能,如圖14和15所示。
從圖11和12分析得出,θ=135°時仿生葉輪產生的平均推進力最大,θ=120°、105°依次減小;θ=105°時產生的平均托舉力最大,θ=120°、135°時依次減小。可得到當θ增加時,推進力增大,托舉力相應減小。
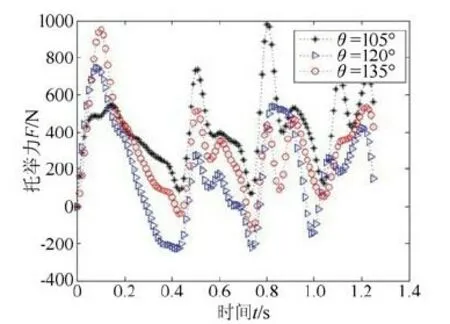
圖14 不同夾角推進裝置產生的托舉力Fig14 Lift force at different angles
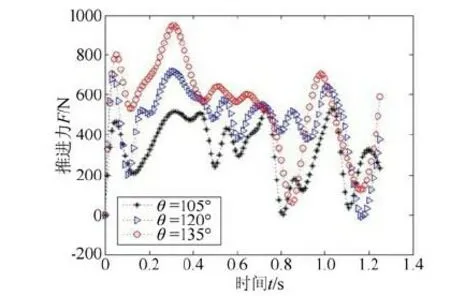
圖15 不同夾角推進裝置產生的推進力Fig15 Propulsive force at different angles
(6)仿真結果分析:①設想的輪-葉復合式推進裝置能夠產生向上的托舉力和向前的推進力;②推進裝置在不同浸水深度h和夾角θ時產生的推進力和托舉力不同,其中θ增大時,托舉力減小,推進力增大;③隨著ω增大,產生的托舉力不斷增大,定能將兩棲車輛托出水面,進入滑行狀態,從而減小水阻力。 由此可見,基于蛇怪蜥蜴踏水機理設計的新型輪-葉復合式兩棲車輛水上推進裝置在理論上是可行的。
1.5 試驗論證
在仿真分析的基礎上,進一步開展了輪-葉復合式推進裝置原理試驗,試驗效果良好。
試驗一:課題組研究設計了仿生葉輪機構,采用兩臺電機驅動單組仿生葉輪機構,電機功率為0.25kW,箱體內包括2塊充電電瓶,電機和傳動裝置總質量30kg。開始時,整個機構沉入水中;通電后,葉輪拍打水面,箱體被托起一定角度,如圖16(a)所示。經浮力實驗測試,在水中將箱體一端提升到相同角度需要150N 的作用力,即采用額定功率為0.25kW 的電機產生了150N 的托舉力。
實驗二:課題組用4臺電機制作了無排水浮箱的雙組仿生葉輪機構,每臺電機額定功率為0.25kW,總質量約25kg。未加電時,由于重力大于浮力,葉輪及電機沉入水中;加電后,因葉輪轉速提高而托起整個機構,整個機構被完全托出水面,仿生葉輪幾乎與水面相切,提升效果良好,如圖16(b)所示。
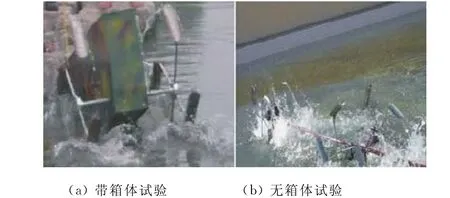
圖16 推進原理試驗Fig.16 Principle tests of the propulsion
先期試驗效果表明,在較小輸出功率下,依靠仿生葉輪與水的高速作用產生的托舉力,可把較大重量的車體托出水面,進入滑行狀態,從而減小水阻力。據此原理,若采用大功率發動機,產生的托舉力足以將渡海車輛托舉出水面,進入滑行狀態。因此,所設想的輪-葉復合式兩棲車輛水上推進技術,在原理上具有可行性。
在以后的研究中,將進一步優化仿生葉輪的結構、參數、材質等,使得仿生葉輪的水動力性能和機械傳動性能達到最優。
2 結束語
通過理論分析和原理試驗論證,提出的基于蛇怪蜥蜴踏水機理的輪-葉式兩棲車輛水上推進技術達到了預期的設想,能夠在不具備大功率車載發動機和復雜滑板技術的情況下,通過改變航態,巧妙地避開了兩棲車輛提速過程中遇到的“阻力墻”現象,大大減小水阻力,有利于航速的大幅度提升。此外,該技術原理還可用于船舶等其他排水型載具的水上推進研究。
[1] 王瑾.高速兩棲突擊車[J].兵器知識,2009,(11):34-36.[2] 李莉,王憲成,韓樹,等.兩棲裝甲車輛興波阻力的計算及流場分析[J].兵工學報,2010,31(8):1103-1105.
[3] 賈小平,于魁龍.減小兩棲車輛水上行駛阻力的方案探討[J].裝甲兵工程學院學報,1998,129(3):54-58.
[4] 韓占忠,王國玉,閆為革.兩棲車輛航行粘性阻力數值分析[J].車輛與動力技術,2003,90(2):6-10.
[5] 胡海坤,張聲濤,熊克芳.車輛“減阻等速”研究與試驗[J].車輛與動力技術,2006,101(1):5-10.
[6] 宋桂霞,趙又群.減少兩棲車輛興波及阻力方法研究與仿真分析[J].系統仿真技術,2010,6(2):110-115.
[7] 宋桂霞,沈磊.兩棲車輛車輪收起前后阻力對比并行計算分析[J].機械科學與技術,2010,29(8):1151-1155.
[8] 李雄,吳穎.AAAV 先進兩棲突擊車[J].兵器博覽.2003,(3):14-17.
[9] 潘玉田,雷建宇,馬新謀,等.提高兩棲戰斗車輛水上航速的研究[J].火炮發射與控制學報,2005,(3):69-72.
[10]TONIA H S,LAUDER G V.Running on water:threedimensional force generation by basilisk lizards[J].Proc.Natl Acad.Sci,2004(101):16784-16788.
[11]GLASHEEN J W,MCMAHON T A.A hydrodynamic model of locomotion in basilisk lizard[J].Nature,1996(380):340-342.
[12]王福軍.計算流體動力學分析——CFD 軟件原理與應用[M].北京:清華大學出版社,2004.
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
