新型混合動力汽車工作模式分析與參數匹配設計
2012-12-03 14:51:36彭志遠秦大同段志輝楊亞聯
中國機械工程 2012年9期
彭志遠 秦大同 段志輝 楊亞聯
1.重慶大學機械傳動國家重點實驗室,重慶,400044
2.重慶長安新能源汽車有限公司,重慶,401120
0 引言
目前,能源問題和環境污染已成為傳統燃油汽車所面臨的兩大突出問題,結合純電動汽車和傳統燃油汽車優點的混合動力汽車成為世界各大汽車公司研究的熱點[1-2]。采用行星齒輪機構的混合動力系統由于其發動機與驅動輪之間無直接機械連接,具有可獨立于汽車行駛工況對發動機工作點進行優化控制的特點,因而可實現整車的高燃油經濟性[3-4]。世界各大汽車公司推出的混合動力汽車,如日本豐田公司推出的“Prius”[5-6]、美國福特公司推出的“Escape”[7-8]以及美國通用公司推出的“Allison”[9]均采用了基于行星齒輪機構的混合動力系統。但以上汽車公司所推出的這些混合動力系統均采用雙電機形式,有的甚至采用雙行星齒輪機構形式,這導致了系統的成本高、結構復雜,并且這些公司均申請了專利對其技術方案進行保護。因此國內需要研究開發具有自主知識產權的混合動力系統方案來規避國外專利從而推動我國節能汽車技術和產業的發展。
段志輝[10]提出了一種采用單電機行星齒輪機構的新型混合動力系統方案,該方案通過控制濕式多片離合器的接合與分離,可以實現混合動力系統在多種模式下工作。筆者對該混合動力系統方案進行了工作模式分析和系統參數匹配設計,并通過系統建模對采用該系統的混合動力整車的動力性和燃油經濟性進行了仿真計算分析,結果驗證了該系統方案的先進性和參數匹配設計的合理性。
1 系統方案與工作模式分析
筆者所提出的混合動力系統方案如圖1所示,發動機輸出軸與行星機構的齒圈、濕式多片離合器的主動盤以及單向離合器連接,行星機構的太陽輪與ISG電機的轉子連接,系統動力由行星架輸出。

圖1 新型混合動力汽車驅動系統結構
該混合動力系統具有純電動驅動、行車充電驅動、發動機單獨驅動、電機助力驅動以及再生制動等典型工作模式,通過工作模式的合理選擇和各工作模式之間的轉換,可優化系統性能,達到整車節能減排的目的。
1.1 純電動驅動
當汽車處于城市低速、低負荷行駛工況時,采用純電動驅動可以避免發動機在低效率工作點運行。在該工作模式下濕式多片離合器處于分離狀態,行星機構的齒圈被單向離合器鎖死(ωr=0),發動機不參與工作。純電動驅動模式下系統功率流如圖2所示,電池輸出的功率經功率轉換器驅動ISG電機運行,功率從行星機構的太陽輪輸入,經過行星輪,最后通過行星架輸出。此時各運動部件的轉速、轉矩滿足以下關系:

圖2 純電動驅動模式下功率流
式中,ωs、ωr、ωc分別為行星機構的太陽輪、齒圈、行星架的轉速;Ts、Tr、Tc分別為行星機構的太陽輪、齒圈、行星架的轉矩;Zr、Zs分別為行星機構的齒圈、太陽輪的齒數;k為行星機構傳動系數。
因此,行星架輸出功率為

1.2 行車充電驅動
當車輛在電池電量或負荷較低的情況下行駛時,在保證汽車正常行駛性能的同時,電動機以發電模式運行以維持電池電量水平,并提高發動機負荷率使之工作在高效區,從而提高能量利用率。此時系統有兩種工作模式,其功率流如圖3所示。模式一是濕式多片離合器接合,行星機構自鎖,發動機輸出功率一部分驅動ISG電機發電,另一部分通過行星機構直接輸出;模式二是濕式多片離合器分離,發動機輸出功率經行星機構分流后,一部分經過太陽輪驅動ISG電機發電,另一部分由齒圈輸入,經過行星輪最后由行星架輸出,以驅動整車行駛。
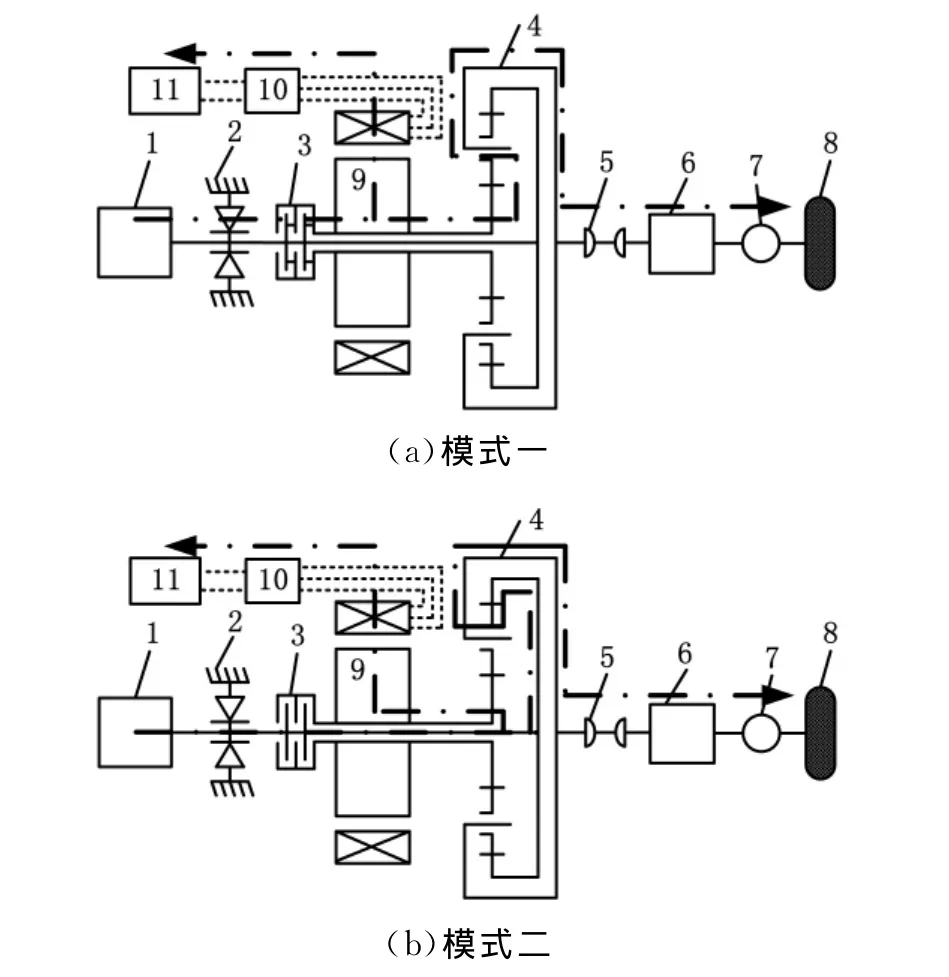
圖3 行車充電驅動模式下功率流
在ISG電機的某個轉速下,當太陽輪所需要提供的發電轉矩超過ISG電機該轉速下的最大發電轉矩(即式(2)的轉矩關系不滿足比例關系)時,需要接合濕式多片離合器,進入行車充電模式一。此時,各部件轉速、轉矩滿足以下關系:

因此,系統行星架輸出功率為

當濕式多片離合器分離、系統進入行車充電模式二時,各運動部件轉速、轉矩須滿足式(1)和式(2),在車速、外界負荷給定的情況下,通過調節ISG電機轉速大小和控制其反向運動(ωs<0),可以使發動機工作在高效區。這時,系統行星架的輸出功率為

1.3 發動機單獨驅動
當汽車以較高車速、較大加速度行駛時,發動機負荷率較大,工作在高效區,此時接合濕式多片離合器,進入發動機單獨驅動工作模式,這時ISG電機既不發電也不電動,電機轉子隨行星機構一起轉動。系統的功率流如圖4所示,發動機輸出功率直接通過行星機構輸出,驅動車輛行駛。系統各運動部件的轉速、轉矩關系滿足式(4)和式(5),且Ts=0。此時,系統行星架輸出功率為

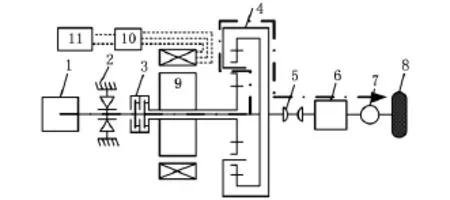
圖4 發動機單獨驅動模式下功率流
1.4 電機助力驅動
當汽車以高車速或大加速度行駛時,ISG電機處于電動模式,電機提供一部分動力輔助發動機驅動車輛行駛,使發動機工作在高效區。這樣既可提高整車動力性,又可有效降低油耗和排放。此時系統有兩種工作模式,其功率流如圖5所示。模式一是濕式多片離合器接合,發動機輸出功率與電機輸出功率疊加后通過行星機構直接輸出;模式二是濕式多片離合器分離,發動機輸出功率與ISG電機輸出功率通過行星機構耦合后輸出。
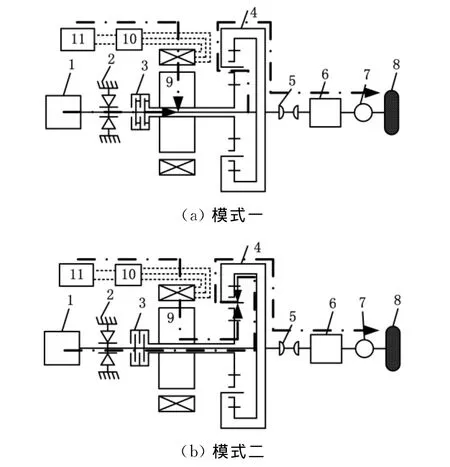
圖5 電機助力驅動模式下功率流
當濕式多片離合器接合,系統進入電機助力模式一時,各運動部件轉速、轉矩須滿足式(4)和式(5)。此時可得到行星架的輸出功率為

當濕式多片離合器分離,系統進入電機助力模式二時,各運動部件轉速、轉矩須滿足式(1)和式(2)。此時可得到行星架的輸出功率公式同式(7)。
在ISG電機的某個轉速下,當太陽輪所需要提供的電動助力轉矩超過ISG電機此轉速下的最大電動轉矩(即式(2)中的轉矩關系不滿足比例關系)時,系統需要濕式多片離合器接合,進入電機助力工作模式一。
1.5 再生制動
在車輛驅動模式下平緩制動或下長坡制動時,發動機制動阻力與行駛阻力始終存在,為了提高能量利用率,在滿足制動安全法規的前提下,應首先考慮ISG電機再生制動,當ISG電機制動力無法滿足制動力需求時,摩擦制動提供一部分制動力。系統進入再生制動時,控制濕式多片離合器接合,發動機制動阻力消耗小部分制動能量,大部分制動能量由ISG電機發電回收到電池中,其系統功率流如圖6所示。系統各運動部件的轉速、轉矩關系滿足式(4)和式(5)。此時電池回收的制動功率為

式中,ηISG、ηbat分別為ISG電機的發電效率與電池的充電效率。
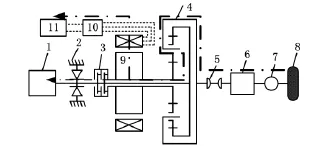
圖6 再生制動模式下功率流
2 系統參數匹配設計
整車系統參數匹配設計的結果直接影響整車的動力性、燃油經濟性以及排放。為此需對傳動系統及其關鍵部件,如發動機、ISG電機、電池進行相關參數的匹配設計。表1、表2所示分別是整車的動力性能指標與整車的主要參數。
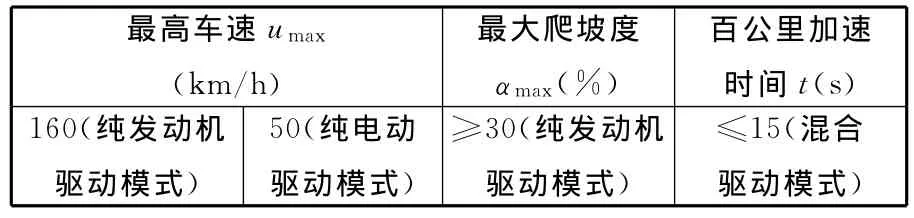
表1 整車動力性能指標
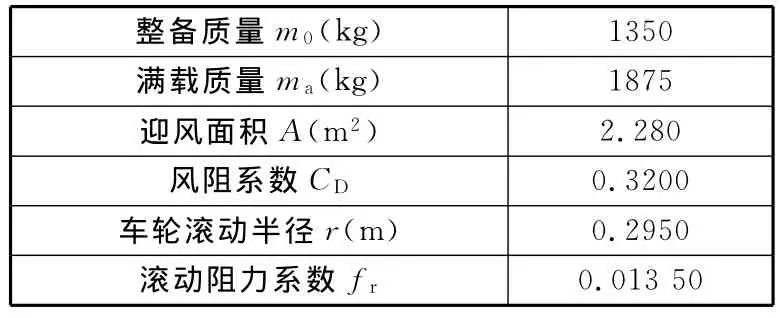
表2 整車主要參數
2.1 變速器參數
2.1.1 主減速器速比
對于混合動力汽車而言,為了獲得良好的加速性能和爬坡性能,同時降低電機功率和電池組容量[11],原則上應盡量選取較大的主減速器速比i0。主減速器速比的選取應滿足汽車最高行駛速度要求:

式中,ne-max為發動機最高轉速。
通過計算可得i0≤4.17,參考傳統車原配變速器設計參數,初步選擇i0=3.93。
2.1.2 變速器速比
當電池荷電狀態(S OC)值過低時,混合動力汽車應運行在發動機單獨驅動模式下。為了使發動機單獨驅動時具有較大爬坡性能,保證整車正常行駛,變速器最大速比必須滿足整車以最低穩定速度25km/h達到30% 的最大爬坡度要求[12]。由于車速較低,空氣助力可以忽略不計,根據下式可以初步計算出變速器最大速比:

式中,ηt為傳動系統效率(取0.85);Te-max為發動機最大輸出轉矩,Te-max=138N·m。
根據式(12)可以計算得到iAMT1≥3.535,初步選擇變速器最大速比為3.67。其他各擋的傳動比大致按等比級數分配,最終確定各擋位傳動比分別為3.67、2.05、1.31、0.96、0.78。
2.2 行星機構參數
行星機構參數選擇的主要依據是讓發動機工作在1500~4000r/min的經濟轉速范圍內,并讓ISG電機在轉速范圍0~6000r/min內能參與加速至最高車速50km/h(純電動驅動)和160km/h(電機助力驅動)。
在純電動驅動模式下,行星機構齒圈被單向離合器鎖死,系統的傳動比為

式中,ωtire為車輪轉速;u為車速。
由式(13)可以得到電機轉速與車速的關系:

由式(14)計算分析可知:ISG電機按最高轉速ωs=6000r/min設計時,采用1~3擋均不滿足純電動驅動時最高車速50km/h的要求,采用4、5兩擋計算出的k值分別為2.54、3.36。
在電機助力驅動模式下,行星機構各運動部件的關系如式(1)所示,按照發動機經濟轉速范圍為1500~4000r/min、ISG 電機最高轉速ωs為6000r/min、AMT速比為0.78(5擋)、以及該模式下最高車速160km/h的要求,可得下式:

由式(15)可得0.545≤k≤3.85,綜合考慮兩種工作模式下k值的范圍,行星機構參數設計為:齒圈齒數Zr=72,太陽輪齒數Zs=36,行星輪齒數Zp=18,行星輪個數Np=4,行星機構傳動系數k=2。
2.3 發動機參數
混合動力汽車在高速行駛(包括在城市中的高速行駛)時優先采用發動機單獨驅動,避免以混合驅動或純電動方式高速行駛時電池的快速充放電損失,從而延長電池使用壽命。因此,綜合考慮汽車預期的最高車速和車載附件功率消耗初步選擇發動機的最大功率為

式中,Pe為發動機輸出功率;g 為重力加速度,取9.81m/s2。
根據表1動力性指標中所確定的車輛最高速度umax=160km/h,并假定車載附件消耗功率(包括空調)Paux=5kW,計算得到發動機輸出功率為64.2kW,考慮加上10%的蓄電池充電功率余量,最終選擇最大功率為72kW、排量為1.6L的JL475Q3型多點電噴發動機。通過發動機臺架試驗獲得發動機外特性曲線及效率等高線,如圖7所示。
2.4 ISG電機參數
2.4.1 電機功率
電動機額定功率可由汽車純電動驅動行駛的最高車速及在低速行駛時具有的克服較小坡度的能力來確定。由動力性能指標可知,整車純電動最高車速為50km/h,考慮純電動模式下車輛應有一定的爬坡能力(一般坡度α范圍為2%~5%),這里坡度取5%。電機輸出功率為
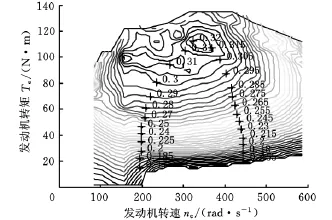
圖7 發動機效率等高線及其外特性

式中,α為坡度;um為純電動驅動時的車輛速度。
由式(17)可得電機的初選功率為12.8kW,綜合考慮車載附件所消耗的電功率,最終選擇ISG電機額定功率為18kW,峰值功率為30kW。
2.4.2 電機基速與最高轉速
由前文可知,當濕式多片離合器結合時,行星機構自鎖,此時發動機與ISG電機串聯在一起具有相同的轉速。發動機最高轉速一般為6000r/min,為了使電機與發動機轉速更好地匹配,選擇ISG電機最高轉速為6000r/min。通過對所選電機性能的測試,發現該電機的基速在2500r/min左右,圖8所示為該電機的外特性曲線。
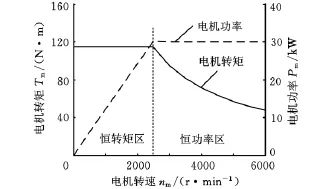
圖8 ISG電機外特性曲線
2.5 電池參數
2.5.1 電池功率
電池在荷電狀態SOC值工作范圍(0.2~0.8)內必須滿足驅動電機的最大功率要求,即在這個范圍內的任意荷電狀態下應滿足驅動電機的最大功率要求。綜合考慮電機逆變器工作效率、電池效率,電池組的峰值功率由下式決定:

式中,Pm-max為電機峰值功率;ηmc-a為電機逆變器平均工作效率(取0.95);ηbat-a為電池平均工作效率(取0.9)。
經計算電機峰值功率為35.1kW。
2.5.2 電池電壓
確定電池組功率后,電池組電壓的設計取決于電池內阻,由單體鎳氫電池的放電特性可知,電池電壓在1.2V時電池特性曲線變化平緩,即單體鎳氫電池的額定電壓應為1.2V。設計電池的電壓就是確定單體鎳氫電池的個數。電池個數一般從功率方面考慮,按下式確定:

式中,Pbmax為單體電池最大計算功率;Ra為單體電池內阻;Ubat為電池額定電壓。
針對某型號鎳氫電池,利用電池測試平臺ARBIN及其MITS軟件測量電池荷電狀態SOC值在0.2~0.8范圍內,單體電池的放電內阻均值為0.0024Ω。由式(19)、式(20)計算出電池個數為234。按照現行電池排列方案每組6個單體鎳氫電池,需要39組。取偶數40組,則電池組的額定電壓為6×40×1.2V=288V。
2.5.3 電池容量
根據該混合動力汽車規定的純電動驅動模式續駛里程為s=10km,純電動驅動模式最高車速um-max=50km/h,電池SOC值工作范圍為0.2~0.8,電池組能量Cbat可由下式計算得到:

式中,ηm-a為電機平均工作效率(取0.85);Sh、Sl分別為電池SOC的上下限值(分別為0.2與0.8);Pmot為純電動驅動模式最高車速對應的功率,可由式(16)計算得出為5.47kW。
根據式(21)可以計算出電池組所需能量為2.38kW·h,考慮到整車行駛過程中,再生制動將回收部分能量,本文選擇電池組額定電壓為288V、額定容量為8A·h,實際電池組總能量約為2.3kW·h。
3 整車性能仿真
為驗證所設計的混合動力汽車傳動系統參數匹配設計的正確性,筆者在MATLAB/Simulink環境下采用整車動力學理論建模與關鍵零部件(如發動機、電機、電池)數值建模相結合的方法建立了整車性能仿真模型。
3.1 燃油經濟性仿真
整車基本控制策略采用本文1.1~1.5節所述方法。筆者在ECE_EUDC循環工況下對整車燃油經濟性進行了仿真。
從圖9可以看出,經過一個ECE_EUDC循環工況后,電池SOC值為0.4875,較初始值0.5下降了0.0125,達到了電池SOC維持平衡的要求(電池SOC經一個循環工況后,一般要求其變化在0.02以內),汽車的續駛里程不會受電池容量的限制。從表3可以看出,所設計的混合動力汽車在ECE_EUDC循環工況下,較傳統汽車燃油節省36.8%,對提高燃油經濟性具有明顯的效果。
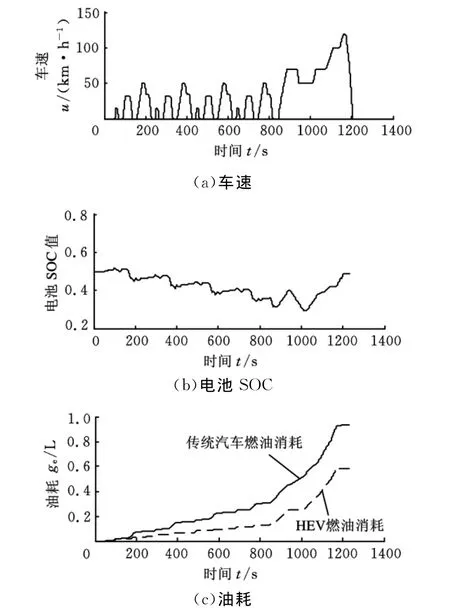
圖9 ECE_EUDC循環工況仿真結果
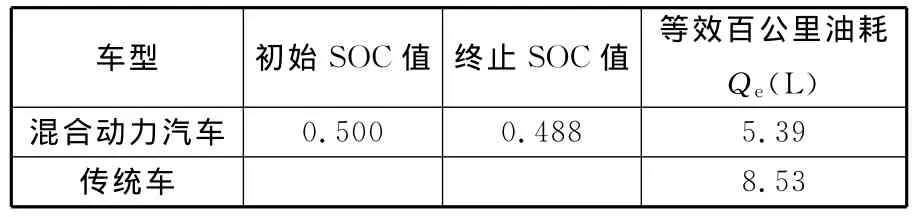
表3 整車燃油經濟性仿真結果
3.2 動力性仿真
對所設計的混合動力汽車進行了ISG電機單獨驅動、發動機單獨驅動、ISG電機與發動機混合驅動條件下加速性能仿真以及勻速25km/h下的最大爬坡度仿真,仿真結果如表4所示。
從表4可以看出:0~50km/h的電機單獨驅動加速時間為8.98s,小于國家863高技術研究發展計劃電動汽車重大專項招標書中對電動汽車的加速性能指標10s的要求;0~100km/h的發動機單獨驅動加速時間為16.3s,混合驅動加速時間僅為9.89s,最大爬坡度超過了30%;50~130km/h混合驅動時的加速能力較發動機單獨驅動時間縮短了10.6s。仿真結果表明,整車動力性能較傳統燃油汽車的動力性能有明顯改善,滿足了混合動力汽車動力性能設計指標。

表4 整車動力性能仿真結果
4 結論
(1)提出了新型混合動力汽車動力傳動系統的結構方案,并對其工作原理和典型工作模式進行了分析。
(2)根據混合動力汽車的設計原則,進行了系統關鍵零部件(發動機、電機、電池、變速器、主減速器以及行星機構)的參數匹配設計。
(3)在 MATLAB/Simulink環境下,建立了整車性能仿真模型,并對其燃油經濟性和動力性進行了仿真計算。結果表明,所設計的新型混合動力汽車的動力性滿足整車動力性能指標要求,其經濟性較傳統燃油汽車有大幅度提高。
[1]Poxon J,Jennings P,Allman-Ward M.Development of a Hybrid Electric Vehicle(HEV)Model for Interactive Customer Assessment of Sound Quality[C]//Hybrid and Eco-friendly Vehicle Conference.Coventry,2008:1-4.
[2]Xin Li,Williamson S S.Comparative Investigation of Series and Parallel Hybrid Electric Vehicle(HEV)Efficiences Based on Comprehensive Parametric Analysis[C]//Vehicle Power and Propulsion Conference.Arlington,2007:499-505.
[3]Borhan H A,Vahidi A,Philips A M,et al.Predictive Energy Management of a Power-split Hybrid Electric Vehicle[C]//American Control Conference.St.Louis,2009:3973-3976.
[4]鄒乃威,王慶年,劉金剛.混合動力汽車行星機構動力耦合裝置控制研究[J].中國機械工程,2010,23(21):2847-2851.
[5]Prokhorov D.Toyota Prius HEV Neurocontrol[C]//Nueral Networks International Joint Conference.Orlando,2007:2129-2134.
[6]Liu Jinming,Peng Huei.Control Optimization for a Power-split Hybrid Vehicle[C]// American Control Conference.Minneapolis,2006:14-16.
[7]Miller J M.Hybrid Electric Vehicle Propulsion System Architectures of the e-CVT Type[J].IEEE Transactions on Power Electronics,2006,21(3):756-767.
[8]Syed F U,Kuang M L,Hao Ying.Active Damping Wheel-torque Control System to Reduce Driveline Oscillations in a Power-split Hybrid Electric Vehicle[J].IEEE Transactions on Vehicular Technology,2009,58(9):4769-4785.
[9]Miller J M,McCleer P J,Everett M.Ultracapacitor Plus Battery Energy Storage System Sizing Methodology for HEV Power Split Electronic CVT’s[C]//Proceedings of the IEEE International Symposium on Industrial Electronics.Dubrounik,2005:317-324.
[10]段志輝.汽車油電混合動力系統的機電動力耦合機構:中國,200810184141.8[P].2009-05-06.
[11]王保華,張建武,羅永革.EQ6110HEV并聯混合動力系統參數匹配及性能研究[J].汽車工程,2006,28(1):7-11.
[12]余志生.汽車理論[M].北京:機械工業出版社,2000.
猜你喜歡
汽車維修與保養(2021年8期)2021-02-16 00:28:30
汽車維修與保養(2021年8期)2021-02-16 00:28:18
汽車與安全(2019年9期)2019-11-22 09:48:03
兒童時代·快樂苗苗(2017年7期)2018-01-24 18:28:45
作文大王·低年級(2016年4期)2016-04-18 00:24:37
汽車與新動力(2015年1期)2015-02-27 12:11:01
決策探索(2014年21期)2014-11-25 12:29:50
汽車與新動力(2014年2期)2014-02-27 12:10:15
汽車與新動力(2013年5期)2013-03-11 16:08:17
燃氣渦輪試驗與研究(2010年4期)2010-04-16 03:54:22