微機皮帶秤設計研究
2013-01-03 02:42:38滑葳
赤峰學院學報·自然科學版 2013年12期
滑 葳
(臨河熱電廠,內蒙古 巴彥淖爾 015000)
1 微機皮帶秤的總體設計方案
電子皮帶秤是一種連續輸送松散物料并進行自動稱量的專用儀表,在我國各行各業得到了廣泛的應用.電子皮帶秤的結構形式有很多種,目前現場采用較多的是帶微處理器的電子皮帶秤.本文設計的內容即為一個微機皮帶秤系統,它主要由稱重傳力機構,荷重傳感器,測速傳感器,放大整形電路、單片機控制系統等幾個部分組成.其稱重原理如下:稱重傳力機構(簡稱秤體)將皮帶上瞬間通過的物料重量m(t)轉變為作用于荷重傳感器上的載荷力P(t),再以力—電式荷重傳感器變成電壓信號Up(t),經放大,濾波后轉變為與瞬時物料重量成正比的數字量Np(t),送給微機.與此同時皮帶線速度V(t)由磁電感應式速度/電脈沖測速傳感器檢出,然后經放大,整形后也送入微機,兩信號在微機中先進行數字濾波,然后作如下算法處理
式中W(t)——瞬時輸送量(kg/s);
m(t)——單位長度皮帶上的瞬時物料重量(kg/s);
P(t)——作用于秤上的載荷量(kg);
L——秤體上的皮帶長度(m);
V(t)——瞬時皮帶線速度(m/s);
Np(t)——經A/D轉換單位長度皮帶上瞬時物料重量所對應的數字量;
NV(t)——瞬時皮帶線速度經磁電感應式速度電脈沖轉換器檢出的脈沖頻率;
K——標準物料對應的轉換系數(頻率/kg);
N0(t)——皮帶秤的系統零值.
單位長度皮帶上的瞬時物料重量可用下式計算:

經公式(1-1)處理后的數據,在單片機的控制管理下,可向用戶提供總輸送量和其它的顯示或打印數據,同時還可以向遠方傳遞控制信息和其它的模擬或數字信號.微機皮帶秤的總體設計框圖如圖1所示.
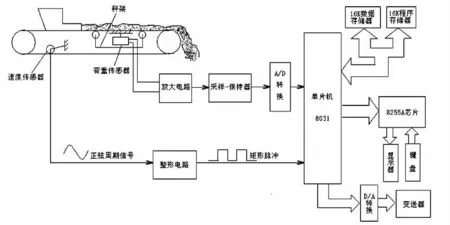
圖1 總體設計框圖
通過圖1可知,本文設計的皮帶秤系統檢測壓力和速度兩路模擬信號,具體檢測重量信號采用的是電阻應變式壓力傳感器,其輸出信號為毫伏級,故需要進行放大,該信號通過三運放構成的精密差動放大電路進行放大、濾波后送入單片機8031.另一路速度信號由電磁式速度傳感器檢出,將該信號接入8031內部的計數器計得每分鐘的脈沖個數,即可得轉速信號.這兩路信號在8031中進行運算并得出物料的瞬時流量信號,通過8255芯片擴展的顯示器可完成實時顯示.
2 檢測單元及放大整形電路的設計
2.1 稱重傳力機構的設計
微機皮帶秤的稱重傳力機構由前、后承重杠桿,無摩擦絞支點,承重托輥和計算箱等組成,如圖2所示.當皮帶上有物料通過時,物料首先經皮帶將載荷力傳遞給承重托輥.由于承重托輥直接支承在承重杠桿上,而前后承重杠桿的端部又可作微小轉動的無摩擦支點承在地基上,因此承重托輥上的載荷力最后分別在兩個承重杠桿的另一端(秤體中部)綜合,并由傳力簧片傳遞到計量箱內.
計量箱位于秤體中部的皮帶下方,它分為有平衡結構和無平衡結構兩種.計量箱的作用是將傳力簧片送來的載荷力傳遞給力-電式荷重傳感器變為電信號送出.
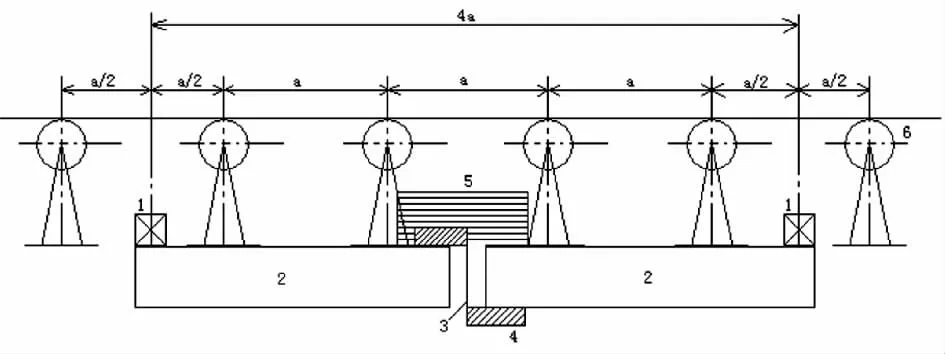
圖2 傳力機構
2.2 荷重傳感器的原理及選用
荷重傳感器的種類很多,有壓磁式荷重傳感器及電阻應變式荷重傳感器等.本設計中采用電阻應變式荷重傳感器.
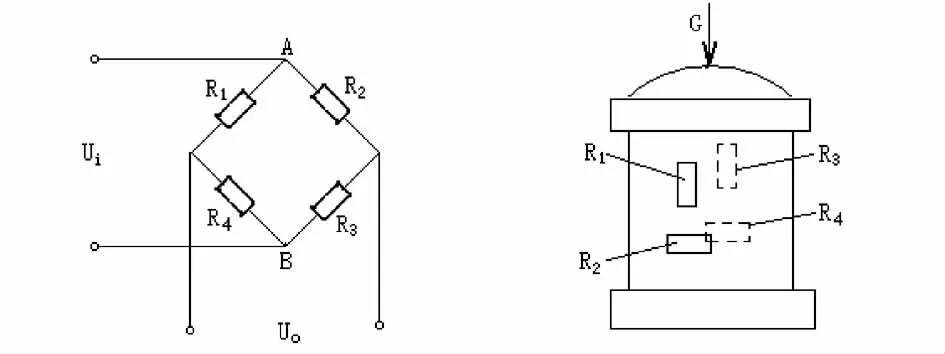
圖3 電阻應變式荷重傳感器原理圖
皮帶秤中荷重傳感器容量可按下式選擇:

式中Qmax——最大瞬時輸出量(t/h);
v——皮帶速度(m/s);
a——承重托輥間距(m);
η——秤體的傳力系數;
α——傳感器安全系數取1.2~1.3.
秤體的傳力系數η根據秤體結構的不同而定.圖2秤體有平衡結構時,

式中d1——傳力吊桿到平衡支點的距離;
d2——傳感器力作用點到平衡杠桿支點的距離.
圖4 測速傳感原理
2.3 測速傳感器的設計與選用
皮帶秤中皮帶線速度的檢測常采用磁電感應式速度/電脈沖傳感器,其結構原理如圖4所示.測速傳感器由與皮帶接觸的測速輪,連接軸,測速齒輪,測速頭組成,測速頭由繞在磁鋼上的線圈構成,工作時置于返程皮帶上的測速輪在皮帶的摩擦帶動下轉動,同時也帶動測速齒輪同軸轉動,在測速齒輪的周圍均勻的銑了幾個槽齒,當測速頭與凸齒相對時,磁通最大,凹齒與測速頭相對時磁通最小,根據電磁感應原理,周期變化的磁通在線圈中將感應出周期變化的電壓,其頻率f正比于皮帶的線速度V.

式中n——測速齒輪的齒數;
V——皮帶線速度(m/s);
D——測速齒輪直徑(m).
公式(2-3)中的f一般要求在1000Hz以上,以保證與荷重傳感器有同等的精度,當f確定后,根據公式(2-3)即可找出符合要求的其它參數的設計數據.電脈沖輸出方式的測速傳感器,具有抗干擾能力強,信號傳輸距離遠和容易被數字電路所接收等優點,因此選用它作為本設計的測速傳感器,其輸出信號為0.5V~2V,50Hz~2000Hz的正弦波信號.
2.4 放大電路的分析與設計
經荷重傳感器轉換后的模擬電壓信號,其信號幅度很小,是毫伏級,由于A/D轉換器的接受的是0~5V的標準電壓.所以需要對傳感器輸出的信號進行放大處理.
2.4.1 放大電路的設計

圖5 放大電路的設計
簡單的差動放大電路在抗干擾方面存在一定缺陷,在本設計中采用的是三個運算放大器組成的增益可調的高輸入阻抗差動式運算電路(如圖5所示),可有效地抑制共模干擾.電路中A1和A2都是同相輸入放大器.如果兩個運算放大器特性相同,則其等效輸入阻抗相近,因而輸入信號UI1和UI2的負載效應也一致.電路中A3是差動放大輸出電路.可變電阻R1跨接在A1和A2的反相輸入端,R2和R3分別為兩個反饋電阻.根據理想運算放大器條件,可得到:

式中,Uom為加在兩個輸入信號源與共端的共模電壓信號.根據歐姆定律,很容易得到下列平衡方程組:
式中,Uo1和Uo2分別為A1和A2的輸出電壓值,聯解上述四個方程組,經過整理可以得到:
把Uo1和Uo2送入A3中,很容易得到運算方程:

如果選R2=R3,則變為:

顯而易見,圖5所示的放大電路對差動信號的增益為(1+2R2/R1)Rf/R,當UI1=UI2=UIc時,由于UA=UB=UIc,R1中電流為零,Uo1=Uo2=UIc,輸出電壓Uo=0.可見,電路放大差模信號,抑制共模信號.差模放大倍數數值愈大,共模抑制比愈高.
荷重傳感器的測量電路輸出的電壓滿度值為20mV,而放大電路的輸出應為0~5V,故Au=5/0.02=250.故我們取R1=1K Ω,R2=2K Ω,Rf=50K Ω,R=1K Ω,可滿足設計要求.
2.5 速度信號放大整形電路的設計
圖6為轉速信號的放大整形電路,圖中D201為齊納二極管,作保護作用.運算放大器接成反相放大器,增益為10倍,放大的目的是提高輸入信號的斜率以避免整形電路的誤動作,D202和D203將對放大器輸出限幅并將負的部分去掉,經處理后的信號接入施密特觸發器進行脈沖整形,最后送入8031的計數器輸入端計得脈沖數并通過工程運算即得轉速.
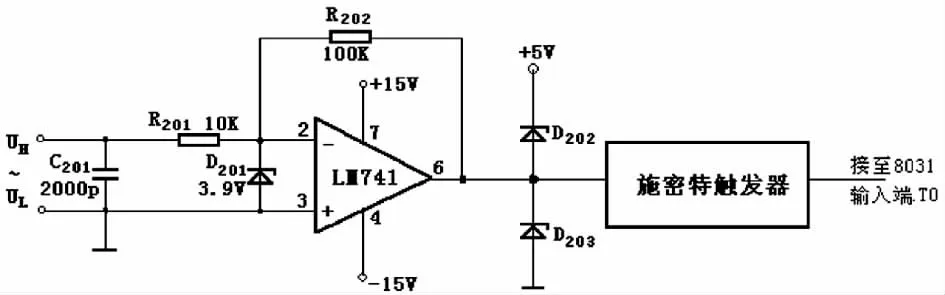
圖6 轉速信號放大整形電路
3 單片機的應用與擴展
3.1 8031單片機結構及應用
單片機內部最核心的部分是CPU,它是單片機的大腦和心臟.CPU的主要功能是產生各種控制信號,控制存儲器、輸入/輸出端口的數據傳送、數據的算術運算、邏輯運算以及位操作處理等.圖7為8031單片機內部結構圖.
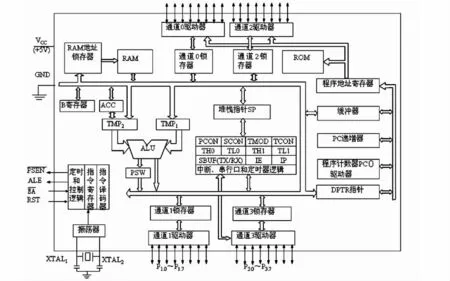
圖7 8031單片機的內部總體結構框圖
本設計中測速傳感器輸出的速度信號經整形后送入8031進行計數,選擇803l內部定時器T1為方式1,產生50ms的定時中斷,將秒單位送秒計數器.選擇8031內部定時器T0為方式1,把T0作為外部中斷請求輸入線,即T0引腳發生負跳變時,計數器加1,1分鐘定時時間到,停止計數,同時讀出T0計數值,送轉速信號暫存單元.由上述可知:T0,Tl均工作于方式 1,T1定時,C/T=0,T0計數,C/T=1,選擇GATE=0,定時器/計數器的運行控制位TRX由軟件置位式清“0”,故T0、T1的方式控制字為15H.
3.2 8255A的結構及功能
8255A是Intel86系列微處理機的配套并行接口芯片,它可為86系列CPU與外部設備之間提供并行輸入/輸出的通道.由于它是可編程的,可以通過軟件來設置芯片的工作方式.所以,用8255A連接外部設備時,通常不用再附加外部電路,給使用者帶來很大方便.本設計就是采用8255芯片來擴展鍵盤和顯示器的.
3.2.1 8255與單片機8031的連接
8255與單片機8031的連接電路如圖8所示.
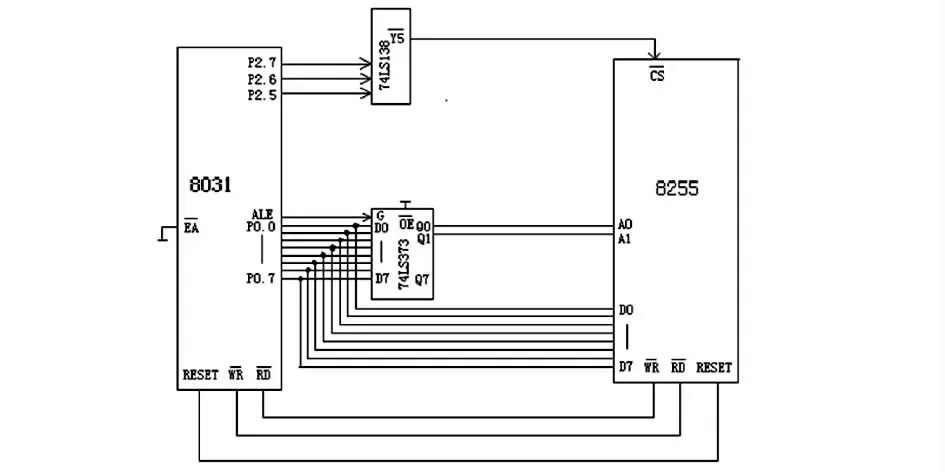
圖8 8031單片機與8255的連接
本設計成功的設計了一個用8031單片機進行控制的皮帶秤系統,它可廣泛地應用于各工礦企業的散狀物料輸送環節.檢測環節選用了電阻應變式荷重傳感器以及簡單實用的電磁式速度傳感器,可靠而實用的實現了對物料重量及傳送速度的檢測.兩路信號經過各自的放大處理電路進入單片機8031,并由8255芯片來實現了鍵盤和顯示器的接口擴展,基本實現了皮帶秤系統的整機功能.
〔1〕田沛.智能化檢測儀表[M].北京:華北電力學院出版社,1993.
〔2〕童詩白.模擬電子技術基礎[M].北京:高等教育出版社,1998.
〔3〕曹巧媛.單片機原理及應用[M].北京:電子工業出版社,1997.
〔4〕潘新民,王燕芳.微型計算機控制技術[M].北京:電子工業出版社,2003.
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25