戰術導彈三回路過載駕駛儀時頻特性分析
2013-02-28 08:06:40王嘉鑫林德福祁載康
兵工學報 2013年7期
關鍵詞:設計
王嘉鑫,林德福,祁載康
(北京理工大學 宇航學院,北京100081)
0 引言
在未來空戰中,近程空對空格斗導彈應具備越肩發射攻擊第4 代戰斗機的能力,從而對導彈控制系統提出了3 點新要求:1)亞秒級的制導時間要求系統快速響應;2)對抗高機動目標強調對靜不穩定彈體的增穩能力;3)大空域飛行要求系統具備強魯棒性。三回路過載駕駛儀能夠適應上述需求,其過載主反饋保證了快速性;增穩回路利用“合成穩定性”和高頻振蕩環節設計解決了對靜不穩定彈體的控制問題,同時增強了系統的魯棒性[1-7]。
現有文獻大多關注在給定性能指標下三回路過載駕駛儀的設計方法,而研究該類駕駛儀時頻特性的資料較少。Nesline 等[5]認為三回路過載駕駛儀對飛行高度、速度以及彈體質心變化的敏感度較低,魯棒性較強,并可降低雷達天線罩斜率寄生回路對制導系統的影響。文獻[8 -11]提出了通過包含時域響應和高頻性能的混合指標、ITAE 最優控制指標和改進的Butterworth 濾波器等方法設計駕駛儀性能指標,并提出了基于輸出反饋極點配置的工程設計方法。
本文對三回路過載駕駛儀及其內回路的結構、時域和頻域性能以及對靜不穩定彈體的增穩能力進行了解析分析,并通過無量綱分析方法,提出了一種三回路過載駕駛儀的設計思路。
1 彈體控制模型
將彈體視為剛體模型,利用小擾動線性化假設方法,建立去耦的縱向彈體控制模型,可由如下微分方程表示:

推導由舵轉角到彈體角速度以及法向過載的傳遞函數分別為
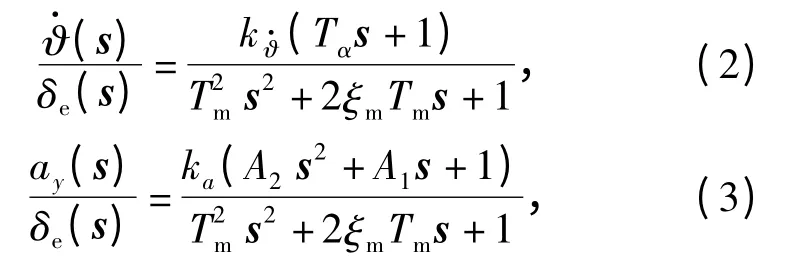
式中:Tm和ξm分別為開環彈體的時間常數和阻尼系數;Tα為攻角滯后時間常數;A1和A2為包含舵面升力的高頻環節系數和ka分別為前向增益。表1 給出了彈體參數的物理意義與表達式[7],其中:Jz為彈體俯仰軸的轉動慣量,S 和L 分別為特征面積和特征長度分別為俯仰力矩系數導數,為升力系數導數。對靜穩定彈體有aα>0,且aα越大靜穩定度越高;aα<0 表示靜不穩定;aα=0 為靜中立穩定。同時對正常式布局彈體aδ>0,而對鴨式布局彈體aδ<0.本文采用的典型彈體仿真參數如表2[10]所示。
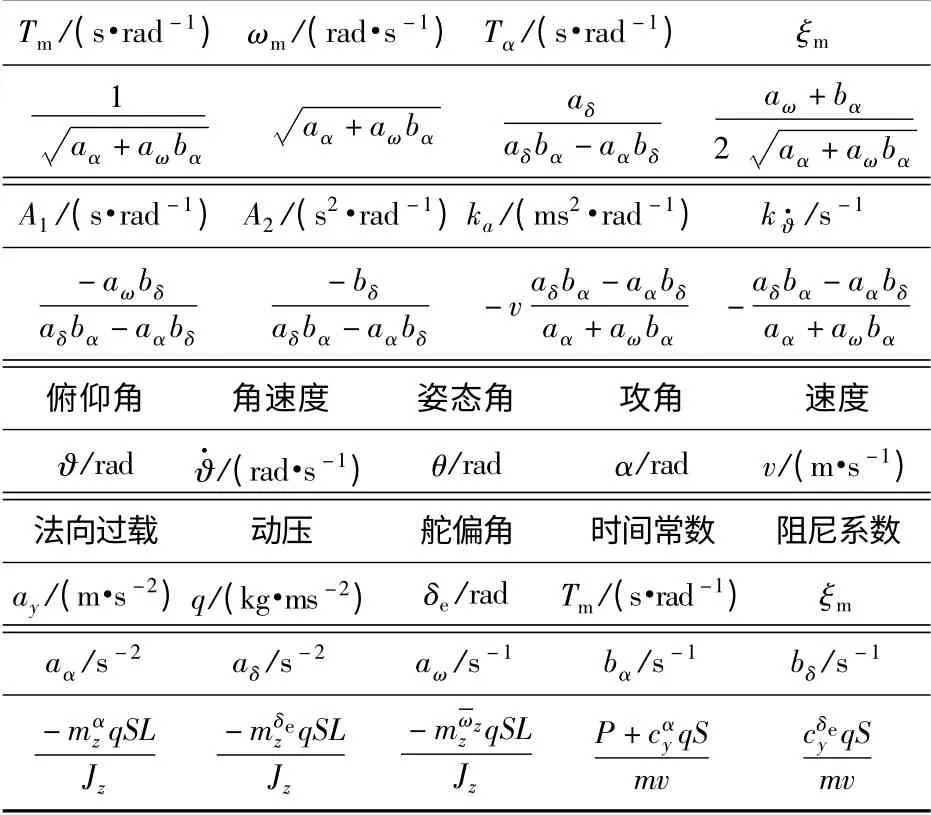
表1 彈體參數的物理意義和表達式Tab.1 Physical significance and expressions of coefficients

表2 仿真參數Tab.2 Simulation parameters
2 新彈體分析
作為多回路反饋的高階控制系統,三回路過載駕駛儀由內向外包括開環彈體以及姿態角速度、姿態角和加速度3 條反饋控制通道,把上述3 條反饋回路獨立構成的飛行控制系統分別簡稱為阻尼回路新彈體、增穩回路新彈體和三回路駕駛儀。
2.1 開環控制系統
開環控制系統也稱開環彈體,如圖1 所示。假設舵機控制系統較快,忽略其動力學滯后,kACT為舵機增益,正常式氣動布局彈體取kACT= -1,鴨式布局kACT=1,則系統傳遞函數為

式中:KC0=kACTvk?·為前向增益;k0為增益調整系數。(4)式表明開環控制系統受彈體氣動性能和飛行環境的影響較大,魯棒性較差,且通常為極度欠阻尼系統,ξm約為0.1[10],彈體頻率較高,抗干擾能力較弱,不能控制靜不穩定彈體,因此,工程上常常需要設計控制器改善開環彈體的性能。

圖1 開環控制系統Fig.1 Open loop control system
2.2 阻尼回路新彈體
阻尼回路新彈體是在開環彈體的基礎上,通過姿態角速度反饋構成的控制系統,其結構如圖2 所示,傳遞函數為

式中:KC1=(kACTk?·v)/(1 +kACTkg為閉環增益;為時間常數;ξ1= (2μmTm+為阻尼;k1為增益調整系數;kg為設計參數,當kgk?·?1 時,有KC1≈kACTk?·v;T1≈Tm,ξ1≈μm+ |kgk?·Tα|/2Tm,通過設計kg使系統(5)式具有良好的阻尼系數,而新彈體的快速性和靜穩定性與開環彈體近似,且系統增益易受彈體飛行狀態的影響,魯棒性較低。新彈體的開環幅值穿越頻率ωCR可由(6)式近似計算[5]:
若要求新彈體穩定,需滿足不等式組

即kg>(1/bα)|aα/aδ|,kg>-(aω+bα)/|aδ|,由于(1/bα)|aα/aδ| >0 >-(aω+bα)/|aδ|,解得

將(8)式代入(6)式,得到ωCR>|aα|/bα.
分析表明,1)對靜穩定彈體,不等式(8)式始終成立,而對靜不穩定彈體,控制系統的穩定性與平衡狀態下攻角和舵轉角的傳遞比的倒數|aα/aδ|相關,當舵效率較高時,即|aα/aδ|較小,阻尼回路新彈體更易達到穩定;2)開環增益kgk?·對系統的穩定性影響較大,但(6)式表明ωCR與kg呈正比,而考慮工程上為獲得足夠的穩定裕度通常期望ωCR遠小于舵機頻帶或傳感器頻帶,因此阻尼回路對靜不穩定彈體的增穩性能將受到頻帶限制。
2.3 增穩回路新彈體
增穩回路新彈體是在阻尼回路的基礎上,增加姿態角主反饋構成的控制系統,如圖3 所示。
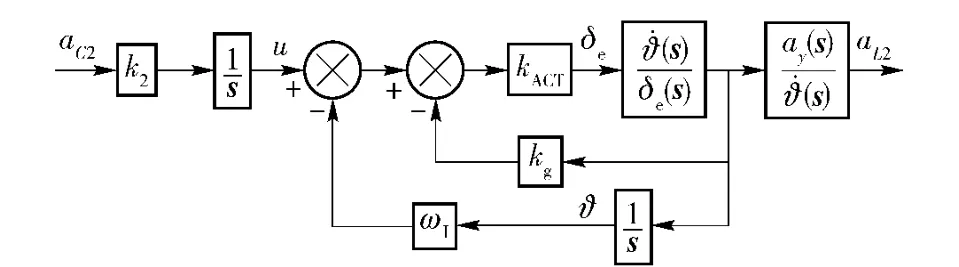
圖3 增穩回路新彈體Fig.3 Stabilizing loop system
增穩回路的設計目的是在彈體響應的短周期內以姿態角速率的積分近似攻角,并將與攻角呈正比的恢復力矩信號反饋至輸入端,從而增加了彈體的靜穩定性,且這種增穩能力取決于控制系統的設計參數,因此可以被稱為“合成穩定性”。在工程上,對姿態角的測量較為容易,因此增穩回路普遍采用姿態角作為主反饋量。(10)式給出了增穩回路新彈體的傳遞函數:


對比(10)式和(11)式可知,增穩回路新彈體與姿態駕駛儀具有相同的特征方程:

式中:T1和T2分別為一階和二階環節時間常數;μ2為阻尼系數。由姿態駕駛儀性能可知,當μ2≈0.5 時,存在如下關系[12]:T1>Tα,T2<Tm,即增穩回路新彈體的二階環節時間常數小于開環彈體時間常數Tm,從而使新彈體的振蕩頻率加快,由于靜穩定性與彈體無阻尼振蕩頻率呈正比,增穩回路新彈體的穩定性較開環彈體有所提高;同時一階環節時間常數大于攻角滯后時間常數Tα,導致系統的響應速度很慢,并且由T1決定的一階根為主導極點,而通常又有Tα?Tm,因此系統閉環極點間的“距離”由此拉開。
若要求增穩回路新彈體穩定,需滿足下列不等式組:

解得

可知當增穩回路和阻尼回路新彈體達到臨界穩定時分別所需設計增益kgSL和kgDL的比為

(15)式表明,提高彈體靜穩定性至臨界穩定時,增穩回路新彈體所需設計增益kg遠小于阻尼回路新彈體,而增穩回路的開環穿越頻率ωCR仍可由(6)式近似計算[5],那么當kg下降后ωCR也降低,即對舵機頻帶的要求也可隨之降低,然而增穩回路新彈體的快速性和阻尼系數均下降。
2.4 三回路駕駛儀
三回路駕駛儀是在增穩回路的外層通過過載反饋構成的閉環控制系統,如圖4 所示。其中,kA、ωI和kg為設計參數。
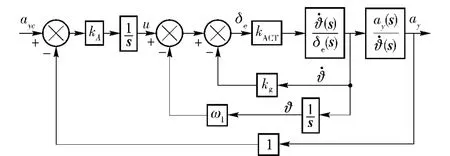
圖4 三回路駕駛儀Fig.4 Three-loop autopilot
三回路駕駛儀的閉環傳遞函數具有如下形式:
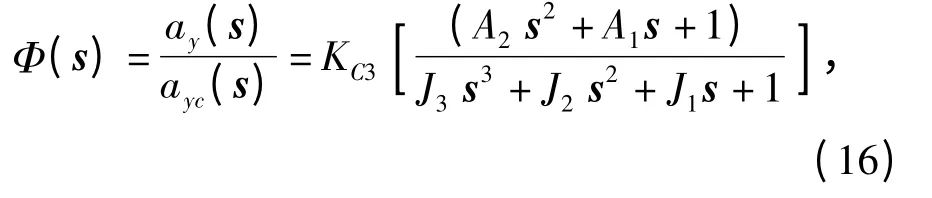
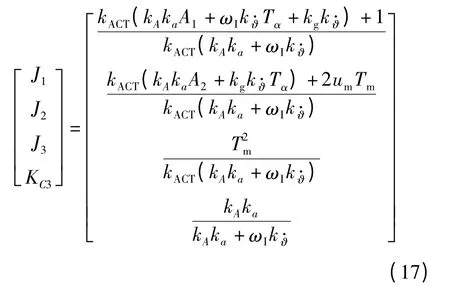
式中:J3、J2、J1為閉環特征多項式系數;KC3為閉環增益。其表達式如下
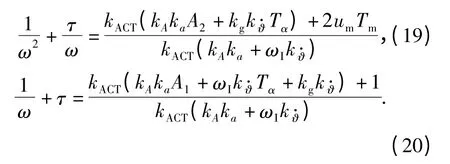
將(16)式的特征多項式分解為一階和二階環節的積,得到

式中:τ 為一階環節的時間常數;ω 和ξ 分別為二階環節的角頻率與阻尼系數,不失一般性,設ξ =0.5,解得
忽略由舵面升力帶來的高頻零點對閉環系統動態性能的影響,即A1≈0,A2≈0,同時設開環彈體參數Tm?1,μm?1,當ωITα?kg?2umTm/k?·Tα時,一階環節為閉環主導模態,那么有

上述分析表明:1)一階環節時間常數τ <Tα,時域響應比增穩回路快,且其快速性可通過設計參數調節;2)二階環節的頻率可由設計參數決定;3)當kg一定時,ωI的取值越大,二階環節越快,一階環節越慢。綜上所述,三回路駕駛儀能夠通過調節設計增益使一階慢根為閉環主導極點,并“遠離”開環彈體極點,且高頻振蕩極點的可控性較強,使控制系統具有較高的魯棒性。
若要求三回路駕駛儀穩定,需滿足不等式組
達到臨界穩定時三回路駕駛儀和增穩回路設計增益的比分別為
分析表明:二者的阻尼回路設計增益kg基本一致;當aα>-ωCRbα時,ωITL比ωISL略小,說明過載閉環后需要更大的反饋控制增益保證系統穩定性。
2.5 對靜不穩定彈體的增穩能力對比
x*=aα/bα表征了靜不穩定彈體的靜穩定度,在臨界穩定時,由不等式(7)式、(13)式、(24)式可分別得到阻尼回路新彈體、增穩回路新彈體和三回路駕駛儀的控制器參數對于x*的約束關系分別如(27)式~(29)式所示,且當x*的下限值越小,表明控制系統對靜不穩定彈體的增穩能力越高。
1)阻尼回路新彈體

2)增穩回路新彈體
當ωCR>-aω-bα時,有

3)三回路駕駛儀
當ωCR> - aω-bα且kA>-ωI/v 時,有

上述分析表明,當設計增益滿足不等式(30)式時

3 種控制系統對被增穩彈體的x*下限值之比約為
(31)式、(32)式表明,增穩回路對靜不穩定彈體的增穩能力相比阻尼回路大幅提高,而三回路駕駛儀與增穩回路基本一致。綜上所述,三回路駕駛儀的增穩回路能夠有效提高控制系統的穩定性;過載反饋閉環之后,在提高系統響應速度的同時,對彈體的增穩能力依然較高。
3 三回路駕駛儀的無量綱分析
3.1 三回路駕駛儀的無量綱化
為便于分析設計參數對控制系統的影響,將三回路駕駛儀進行無量綱化。設閉環系統(16)式的低頻主導極點和高頻振蕩極點分別為p1、p2和p3,為保證系統具有良好的穩定性,三回路駕駛儀的閉環極點均為LHP 極點,并存在如下關系:

上述分析表明,τ、ω 和ξ 是三回路駕駛儀的主要性能參數,并能夠與閉環極點相互表示。在給定狀態空間描述下,利用輸出反饋的極點配置方法[9],三回路駕駛儀的閉環極點能夠任意接近期望極點,從而使駕駛儀的設計參數與閉環極點一一對應,并以此確定系統的開環性能。為便于分析,采用無量綱化方法,研究三回路駕駛儀的設計參數、閉環極點、開環和閉環系統性能參數之間的對應關系。
令λ=ωτ 為無量綱時間常數,表征了低頻極點與高頻極點的距離。定義無量綱算子忽略高頻零點的影響,得到三回路駕駛儀閉環傳函的無量綱表達式為
λ、ξ 和Kc決定了三回路駕駛儀無量綱系統的性能。在低頻處較小而λ 較大,系統(34)式可近似為一階慣性環節,傳遞函數為

3.2 無量綱系統的時域分析
為考察駕駛儀無量綱閉環系統的時域性能,令閉環增益Kc≈1,阻尼系數ξ=0.6[6],獲得三回路駕駛儀無量綱模型和一階環節無量綱模型的單位階躍響應上升時間隨λ 的變化曲線如圖5 所示。圖6給出了當λ =7 時無量綱駕駛儀對單位階躍過載指令的響應曲線。
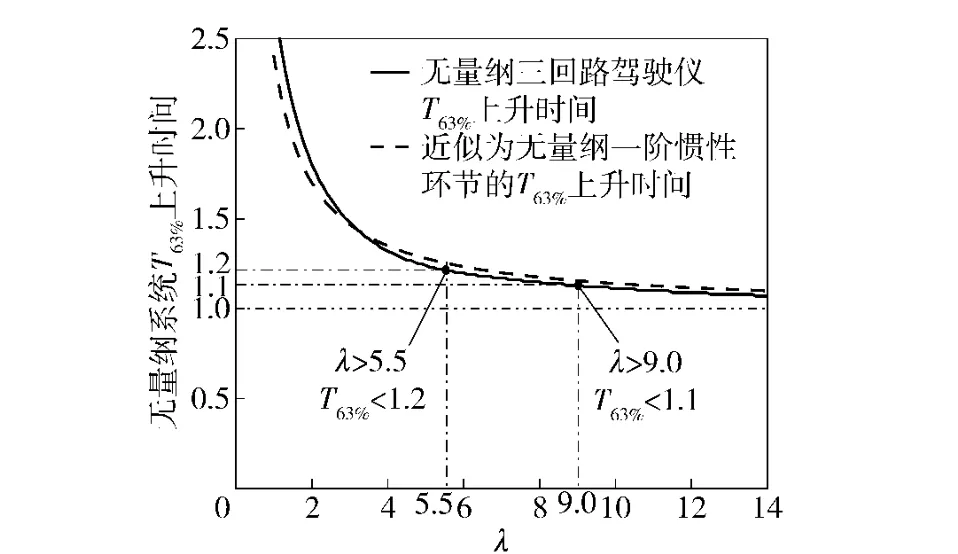
圖5 無量綱系統T63%隨λ 的變化Fig.5 Non-dimensional λ
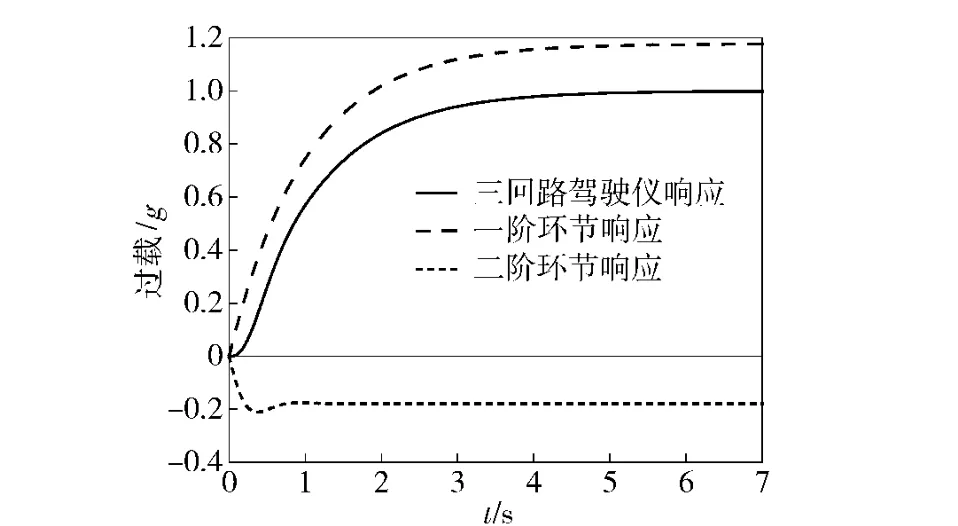
圖6 無量綱駕駛儀的單位階躍響應Fig.6 Response of the autopilot to a step command
仿真結果表明:1)駕駛儀和一階環節的T63%近似,工程上可利用一階環節近似估計三回路駕駛儀的時域性能;2)隨λ 的增大而減小,當λ 足夠大時趨近于1;3)當λ >5.5 時能夠收斂至±20%的誤差帶以內;當λ >9 時基本不再隨λ 變化;4)一階環節為駕駛儀閉環主導環節。
3.3 無量綱系統的頻域分析
通常彈體動力學的不確定性最大[7],因此將三回路駕駛儀閉環模型在彈體環節處斷開構成開環控制系統,其幅相裕度與穿越頻率是駕駛儀的重要設計指標,在頻域內考察λ 對相位裕度和穿越頻率的影響。(36)式給出了駕駛儀的無量綱開環傳遞函數:
(36)式并不顯含λ,且與彈體氣動性能以及設計參數相關,但由前述對應關系可得到駕駛儀開環性能隨設計指標的變化規律。令)的相位裕度為Pm,穿越頻率為ωCRτ,在表2 給出的仿真條件下,Pm和ωCRτ 隨λ 的變化曲線分別如圖7 和圖8 所示。研究結果表明:1)駕駛儀速度越快,隨λ 增大,穩定裕度收斂越快;2)開環穿越頻率隨λ 近似線性變化,當λ 較大時,曲線的斜率ωCR/ω 約為常值;3)繼續增大λ,穩定裕度將趨于常值,穩定性不再提高,而無量綱穿越頻率將繼續增大。
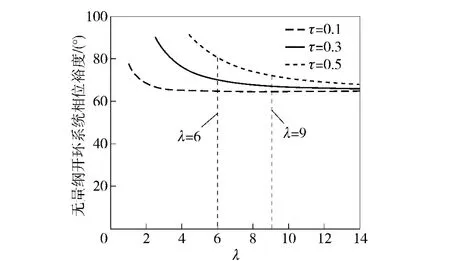
圖7 開環相位裕度隨λ 的變化Fig.7 Open loop phase margin versus λ
綜上所述,本文提出了一種三回路駕駛儀的設計思路:通過增穩回路設計一個遠離開環彈體頻率且主要受系統設計參數決定的閉環一階低頻主導極點和一對阻尼合適的高頻極點,在折衷了系統快速性的同時達到提高魯棒性和穩定性的目的。控制系統付出的代價是:若增強低頻極點的時域主導性需要增大高、低頻極點間的頻率差,而高頻極點又直接影響駕駛儀的開環穿越頻率以及舵機帶寬,將導致響應較快的舵機系統搭配較慢的駕駛儀,使控制資源的利用率下降。
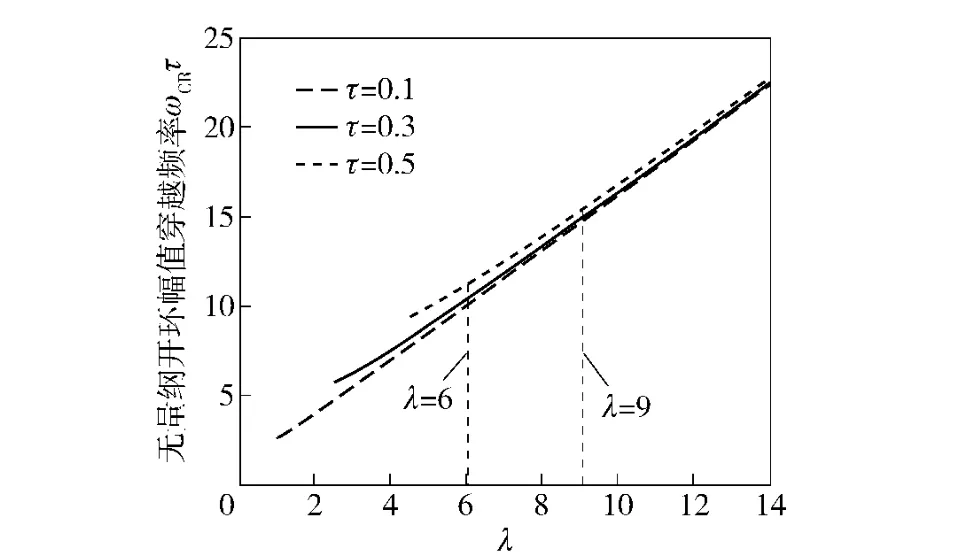
圖8 無量綱穿越頻率ωCRτ 隨λ 的變化Fig.8 Non-dimensional crossover frequency ωCRτ versus λ
在駕駛儀設計中,首先根據總體需求確定控制系統快速性指標τ 和合適的阻尼系數ξ,其次選取合適的λ,同時檢驗開環穿越頻率ωCR與舵機頻帶的匹配性和穩定裕度等指標,研究表明在保證舵機系統頻帶約為駕駛儀穿越頻率的3 ~5 倍時,λ 可取6 ~9.該設計思路通過閉環系統設計并輔以開環指標檢驗,能夠使駕駛儀具有合適的快速性、穩定性和魯棒性。
4 結論
建立了縱向彈體控制模型,提出了三回路過載駕駛儀的兩層內回路可獨立構造新彈體的概念,并對比研究了開環彈體、阻尼回路新彈體、增穩回路新彈體和三回路駕駛儀的結構、快速性、魯棒性以及對靜不穩定彈體的增穩能力;推導了三回路駕駛儀的無量綱模型并進行了仿真分析;最后提出了一種三回路駕駛儀的設計思路。
研究結果表明:阻尼回路新彈體可抑制彈體擺動,但其增穩能力和魯棒性較弱;增穩回路新彈體構造了一階低頻主導極點,具有良好的增穩能力和魯棒性,但受彈體氣動性能限制,其響應速度較慢;三回路駕駛儀的時頻特性主要由設計參數決定,魯棒性較強,其增穩回路提高了系統的穩定性,過載主反饋使駕駛儀具有較快的響應速度。
References)
[1]Mracek C P,Ridgely D B.Missile longitudinal autopilot:comparison of multiple three loop topologies[C]∥AIAA Guidance,Navigation,and Control Conference.San Francisco:AIAA,2005:2005 -6380.
[2]Mracek C P,Ridgely D B.Missile longitudinal autopilot:connections between optimal control and classical topologies[C]∥AIAA Guidance,Navigation,and Control Conference.San Francisco:AIAA,2005:2005 -6381.
[3]Wise K A.Robust stability analysisi of adaptive missile autopolit[C]∥AIAA Guidance,Navigation,and Control Conference.Keystone:AIAA,2008:1 -18.
[4]Kang S,Kim H J,Won D,et al.Robust roll-pitch-yaw integratedautopilot for a high angle-of-attack missile[C]∥AIAA Guidance,Navigation,and Control Conference.Keystone:AIAA,2008:2008 -7001.
[5]Nesline F W,Zarchan P.Robust instrumentation configuration for homing missile flight control[C]∥Guidance and Control Conference.Reston:AIAA,1980:209 -219.
[6]Zarchan P.Tactical and strategic missile guidance[M].5rd ed.Virginia:AIAA Inc,2007:483 -539.
[7]Garnell P,East D J.Guided weapon control systems[M].Oxford:Pergamon Press,1977.
[8]Lin D F,Fan J F,Qi Z K,et al.Analysis and improvement of missile three-loop autopilots[J].Journal of Systems Engineering and Electronics,2009,20(4):844 -851.
[9]Fan J F,Lin D F,Qi Z K,et al.Missile autopilot design using optimal control and frequency constraint[C]∥2nd International Syposium on Systems and Contron in Aerospace and Astronauties,ISSCAA,Shenzhen,China:IEEE,2008:1 -6.
[10]王輝,林德福,祁載康.導彈偽攻角反饋的三回路駕駛儀分析[J].系統工程與電子技術,2012,34(1):92 -98.WANG Hui,LIN De-fu,QI Zai-kang.Design and analysis of missile three-loop autopilot with pseudo-angle of attack feedback[J].Systems Engineering and Electronics,2012,34(1):92 -98.(in Chinese)
[11]Wang H,Lin D F,Wang J,et al.Design and analysis of missile two-loop autopilot with PI compensator under Multi-constraints[C]∥3rd International Conference on Advanced Computer Theory and Engineering (ICACTE).Chengdu IEEE,2010:V5-117-121.
[12]魏先利,夏群力,祁載康.姿態及過載自動駕駛儀比例導引對比研究[J].彈箭與制導學報,2003,23(4):5 -8,12.WEI Xian-li,XIA Qun-li,QI Zai-kang.Comparing study of proportion navigation guidance law of attitude and acceleration autopilots[J].Journal of Projectiles,Rockets,Missiles,and Guidance,2003,23(4):5 -8,12.(in Chinese)
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04