兩種并聯(lián)機(jī)構(gòu)的靜剛度及有限元分析
2013-03-17 01:43:40王南高鵬崔國(guó)華郝麗紅
王南,高鵬,崔國(guó)華,郝麗紅
(1.河北工程大學(xué)機(jī)電學(xué)院,河北邯鄲056038;2.中國(guó)科學(xué)院深圳先進(jìn)技術(shù)研究院,廣東深圳518055)
并聯(lián)機(jī)構(gòu)的剛度是并聯(lián)機(jī)構(gòu)性能的重要指標(biāo),并且為并聯(lián)機(jī)構(gòu)的設(shè)計(jì)提供重要理論依據(jù)。對(duì)并聯(lián)機(jī)構(gòu)的建立精確的剛度模型,成為近年來研究學(xué)者的研究重點(diǎn)。陳吉清等[1]利用螺旋矢量法建立了并聯(lián)機(jī)床剛度的數(shù)學(xué)模型,并對(duì)并聯(lián)機(jī)床動(dòng)態(tài)性能進(jìn)行了分析。呂亞楠等[2]利用有限元法研究了一種冗余并聯(lián)機(jī)床的靜剛度。李育文等[3]用有限元法分析了一種6-UPS并聯(lián)機(jī)床靜剛度,并且考慮了并聯(lián)機(jī)床的支鏈和機(jī)架的變形。王友漁等[4]借助子結(jié)構(gòu)綜合思想和Ansys參數(shù)化設(shè)計(jì)語言,構(gòu)造了Trivariant和Tricept兩種機(jī)械手的有限元模型,充分考慮了機(jī)構(gòu)中各種鉸鏈對(duì)并聯(lián)機(jī)構(gòu)處于不同位形時(shí)的整機(jī)靜、動(dòng)態(tài)特性的有限元快速重構(gòu)技術(shù)。胡波等[5]提出了一種將3-RPS機(jī)構(gòu)的變形和剛度轉(zhuǎn)化為一個(gè)等效無約束反力的6自由度并聯(lián)機(jī)構(gòu)3-RPPS的變形和剛度進(jìn)行分析。
在少自由度并聯(lián)機(jī)構(gòu)中,由于機(jī)構(gòu)結(jié)構(gòu)自身的原因,使得機(jī)構(gòu)內(nèi)部存在約束力/約束力矩,從而對(duì)整機(jī)的剛度精度產(chǎn)生重要影響,因此在分析中應(yīng)予以考慮[6]。本文就3-RPS并聯(lián)機(jī)構(gòu)及其變種3-SPR并聯(lián)機(jī)構(gòu)建立含約束力/力矩的剛度模型,并利用商用有限元軟件Ansys Workbench驗(yàn)證兩種并聯(lián)機(jī)構(gòu)剛度模型的正確性。
1 系統(tǒng)簡(jiǎn)介
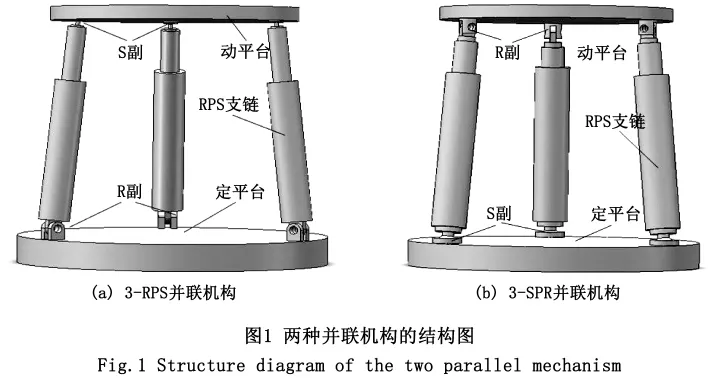
3-RPS并聯(lián)機(jī)構(gòu)是三自由度并聯(lián)機(jī)構(gòu)。由上下2個(gè)平臺(tái)以及3個(gè)支鏈組成。其中3條支鏈由R、P、S3個(gè)運(yùn)動(dòng)副組成,支鏈通過R副與定平臺(tái)相連,另一端通過S副與動(dòng)平臺(tái)相連,其中驅(qū)動(dòng)力由P副提供。三條支鏈平均分布將動(dòng)、定平臺(tái)連接起來(圖1-a)。3-SPR并聯(lián)機(jī)構(gòu)是3-RPS并聯(lián)機(jī)構(gòu)的變異模型,上、下兩個(gè)平臺(tái)通過3個(gè)SPR支鏈連接。一端由S副連接定平臺(tái),另一端由R副連接動(dòng)平臺(tái)。其中P副提供動(dòng)力輸出(圖1-b)。
1.1 位置逆解
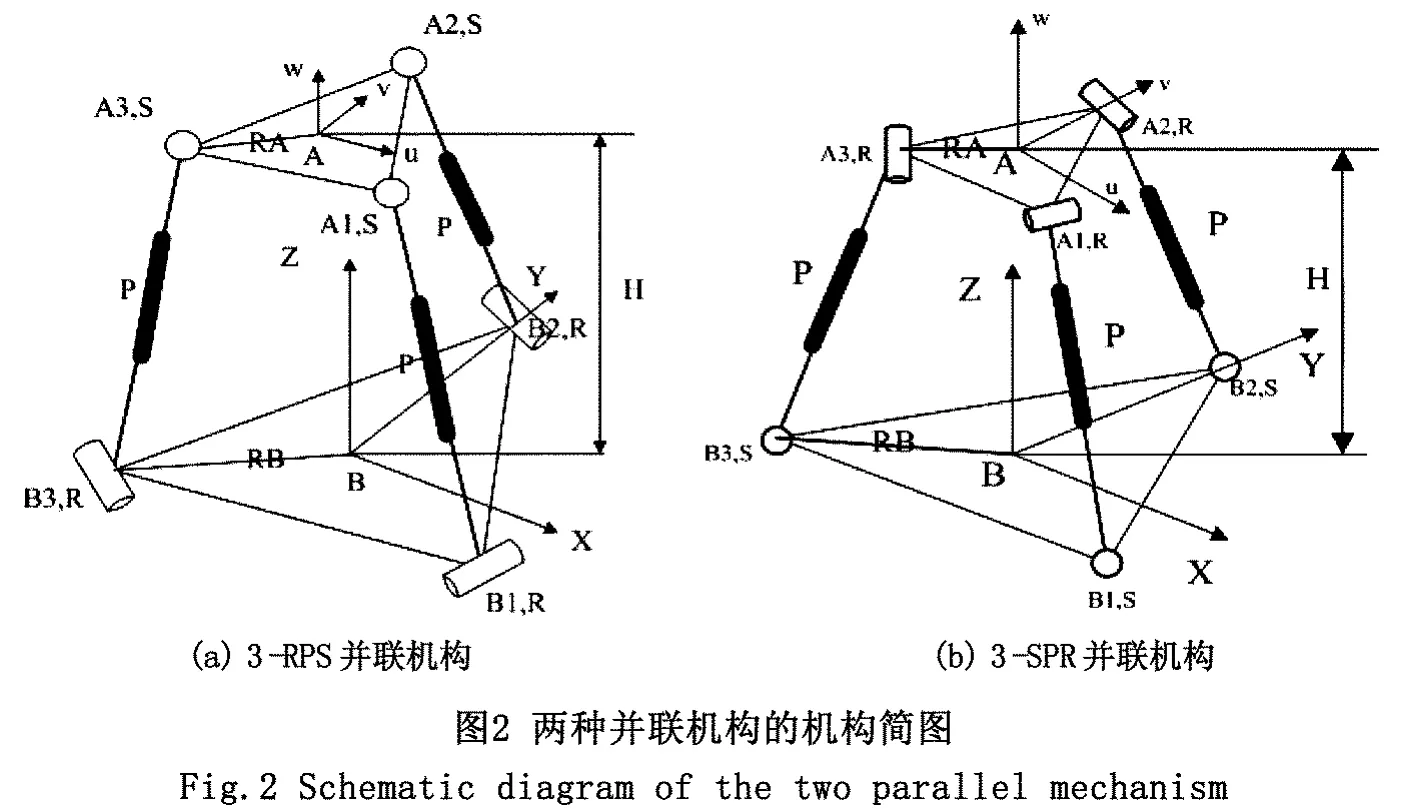
圖2為兩種并聯(lián)機(jī)構(gòu)的機(jī)構(gòu)簡(jiǎn)圖。建立笛卡爾直角坐標(biāo)系B-XYZ,以定平臺(tái)的中心點(diǎn)為坐標(biāo)系原點(diǎn)B,X軸平行BB1且方向向右,Y軸沿BB2方向,Z軸垂直于面B1B2B3且向上。以動(dòng)平臺(tái)的中心點(diǎn)A建立動(dòng)坐標(biāo)系A(chǔ)-uvw,u軸方向AA1且方向向右,v軸沿AA2方向,w軸垂直于面A1A2A3且向上。
設(shè)定A點(diǎn)的初始坐標(biāo)為(0,0,H),動(dòng)平臺(tái)的任一位形可描述為動(dòng)平臺(tái)繞u軸旋轉(zhuǎn)α,繞v軸旋轉(zhuǎn)β,w方向的位移ZA。
封閉向量Li為

式中:qi-桿長(zhǎng);li-沿桿方向的矢量;Ai-點(diǎn)Ai在B-XYZ坐標(biāo)系中的位矢;-動(dòng)平臺(tái)上Ai的坐標(biāo)變化齊次矩陣。
由于機(jī)構(gòu)本身的約束關(guān)系,可以得到
聯(lián)立式(1)、式(2)、式(3)得桿長(zhǎng)qi為

1.2 雅可比矩陣的求解[7]
設(shè)動(dòng)平臺(tái)的速度為V,則

則微動(dòng)平臺(tái)的驅(qū)動(dòng)映射雅可比矩陣JA為
ri球鉸各點(diǎn)相對(duì)于動(dòng)平臺(tái)中心點(diǎn)的矢徑
球鉸點(diǎn)S的速度矢量AVi可表示為

AVi在R的投影Vui=0,可得

則可得到約束映射矩陣JC
并可得到完整的映射矩陣

1.3 剛度矩陣的求解
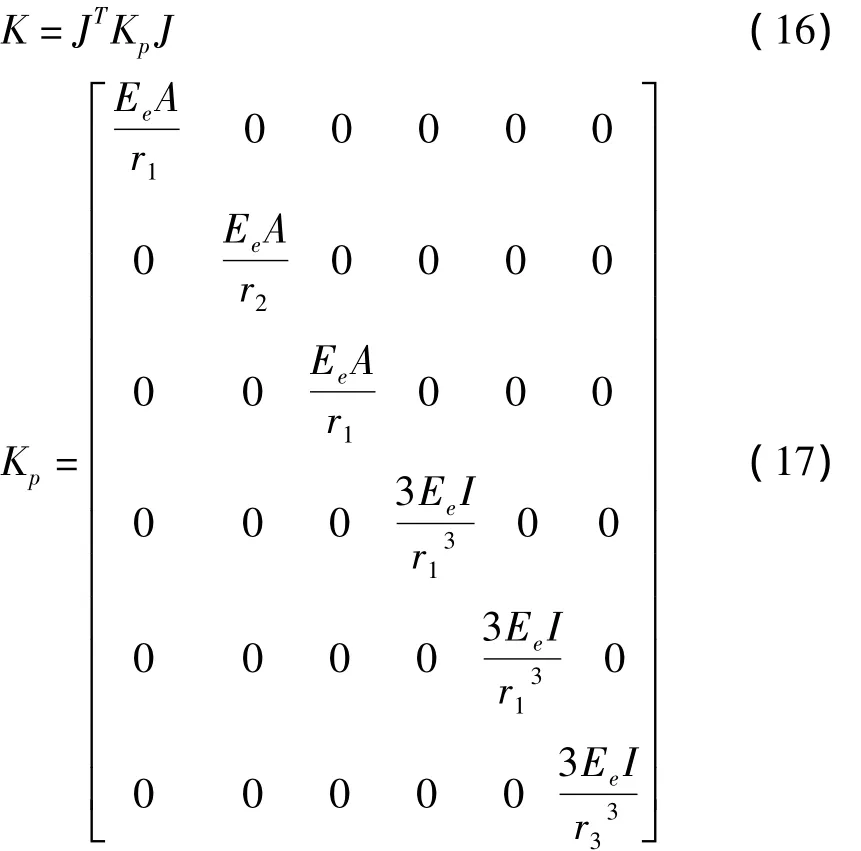
各分支在驅(qū)動(dòng)力Fai和約束反力Fpi的作用下產(chǎn)生變形,設(shè)約束反力Fpi產(chǎn)生的變形δri沿ri方向,可以得到

式中:A-桿的橫截面積;Ee-彈性模量;ki-各分支的剛度系數(shù)。
由于δri很小,其方向可以看作是沿Fpi方向,也就是R副的方向,可知

式中:EeI-分支的彎曲剛度;I-分支的慣性矩。

得到機(jī)構(gòu)的剛度矩陣K為
由于3-SPR并聯(lián)機(jī)構(gòu)與3-RPS的結(jié)構(gòu)類似,推導(dǎo)雅可比矩陣的過程同上。在剛度模型中,由于S副位于其支鏈的下面,其變形情況也與3-RPS類似,推導(dǎo)過程略。
2 數(shù)值算例
給定參數(shù)RB=100 mm,RA=80 mm,初始高度H=75 mm,

由兩種并聯(lián)機(jī)構(gòu)的靜剛度可以發(fā)現(xiàn)(表1),Z方向的剛度值總比其它兩個(gè)方向大,并且3-SPR并聯(lián)機(jī)構(gòu)的剛度比3-RPS的剛度要大。
3 有限元分析
并聯(lián)機(jī)構(gòu)的剛度模型是位形的函數(shù),因此在應(yīng)用有限元軟件對(duì)并聯(lián)機(jī)構(gòu)分析時(shí),定會(huì)針對(duì)不同位形對(duì)并聯(lián)機(jī)構(gòu)進(jìn)行有限元分析[8]。利用Solidworks三維實(shí)體建模軟件建立兩種并聯(lián)機(jī)構(gòu)的實(shí)體模型,利用軟件自身的裝配將并聯(lián)機(jī)構(gòu)按照實(shí)際情況裝配到一起。根據(jù)桿長(zhǎng),將并聯(lián)機(jī)構(gòu)調(diào)整到需要的位姿,然后導(dǎo)入到Ansys Workbench中,按照并聯(lián)機(jī)構(gòu)的運(yùn)動(dòng)副設(shè)置其連接條件。兩種并聯(lián)機(jī)構(gòu)的材料按照彈性模量E=2.11e11 Pa,泊松比γ=0.3,屈服極限δ=350 MPa。整機(jī)模型采用四面體和六面體單元?jiǎng)澐志W(wǎng)格,單元數(shù)目為14 368,節(jié)點(diǎn)數(shù)為51 153。外載荷F=[10 -15 20]N,M=[-20 10 15]N/m。
表2中列出了兩種并聯(lián)機(jī)構(gòu)在不同位形時(shí)的變形情況。結(jié)合表1可以看到理論分析值與有限元分析的結(jié)果的極為相近,說明剛度模型的準(zhǔn)確性。縱向?qū)Ρ缺?中位置Ⅰ位置Ⅱ位置Ⅲ的變形云圖,Z方向的剛度總比其余兩個(gè)方向大,即兩種并聯(lián)機(jī)構(gòu)承受Z方向載荷能力強(qiáng)于其余兩個(gè)方向。從兩種并聯(lián)機(jī)構(gòu)的X方向變形云圖中可以看出,兩種并聯(lián)機(jī)構(gòu)在不同位形時(shí),3-SPR并聯(lián)機(jī)構(gòu)在X方向的剛度均略大于3-PRS,跟理論分析的結(jié)果一致。

表1 兩種并聯(lián)機(jī)構(gòu)靜剛度Tab.1 Static stiffness of the two parallel mechanism N/m2
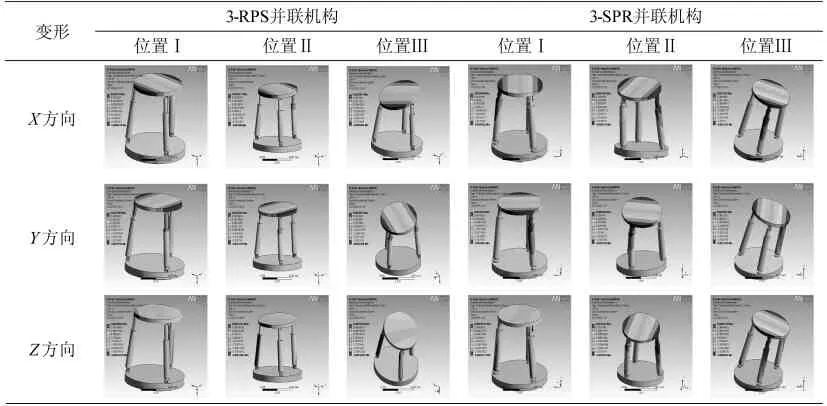
表2 兩種并聯(lián)機(jī)構(gòu)各向變形云圖Tab.2 Each direction deformation of the two parallel mechanism
4 結(jié)論
有限元軟件驗(yàn)證結(jié)果表明,3-SPR并聯(lián)機(jī)構(gòu)的剛度性能優(yōu)于3-RPS并聯(lián)機(jī)構(gòu)的剛度性能,兩種并聯(lián)機(jī)構(gòu)的Z方向剛度均比X、Y兩個(gè)方向的剛度大。
[1]陳吉清,蘭鳳崇.Stewart并聯(lián)機(jī)床瞬時(shí)剛度分析與應(yīng)用[J].南京理工大學(xué)學(xué)報(bào),2007,31(4):482-486.
[2]呂亞楠,王立平,關(guān)立文,等.一種冗余并聯(lián)機(jī)床靜剛度有限元分析與優(yōu)化設(shè)計(jì)[J].機(jī)械設(shè)計(jì)與制造,2008,2(2):1-3.
[3]李育文,張華,楊建新,等.6-UPS并聯(lián)機(jī)床靜剛度的有限元分析和實(shí)驗(yàn)研究[J].中國(guó)機(jī)械工程,2004,15(2):112-115
[4]王友漁,趙興玉,黃田,等.可重構(gòu)混聯(lián)機(jī)械手Trivariant和Tricept的靜動(dòng)態(tài)特性預(yù)估與比較[J].天津大學(xué)學(xué)報(bào),2007,40(1):41-45.
[5]胡 波,路懿.求解3-RPS并聯(lián)機(jī)構(gòu)剛度的新方法[J].機(jī)械工程學(xué)報(bào),2010,46(1):24-29.
[6]劉樹青,吳洪濤.一種新型起重機(jī)器人的運(yùn)動(dòng)學(xué)分析與應(yīng)用[J].河北科技大學(xué)學(xué)報(bào),2004,25(2):58-61.
[7]王南,張莉婷,郝莉紅.空間3-UPU/UPU機(jī)構(gòu)的剛度分析[J].河北工程大學(xué)學(xué)報(bào):自然科學(xué)版,2012,29 (3):85-87.
[8]LU Y,HU B.Analyzing kinematics and solving active/ constrained forces of a 3SPU+UPR parallel manipulator[J].Machine and Mechanism Theory,2007,42 (10):1298-1313.
猜你喜歡
計(jì)算機(jī)應(yīng)用(2022年2期)2022-03-01 12:33:42
計(jì)算機(jī)應(yīng)用(2021年4期)2021-04-20 14:06:36
計(jì)算機(jī)應(yīng)用(2021年1期)2021-01-21 03:22:38
中華詩詞(2020年1期)2020-09-21 09:24:52
小學(xué)生作文(中高年級(jí)適用)(2018年5期)2018-06-11 01:22:56
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2017年11期)2017-04-23 07:18:00
數(shù)學(xué)大王·中高年級(jí)(2016年12期)2016-12-26 21:37:36
機(jī)械工程師(2015年10期)2015-02-02 01:14:03
小天使·一年級(jí)語數(shù)英綜合(2015年2期)2015-01-14 06:35:05
機(jī)電產(chǎn)品開發(fā)與創(chuàng)新(2014年4期)2014-03-11 16:42:24
