基于Recurdyn的蛇形機器人的蜿蜒運動仿真
2013-03-17 01:43:42龐博鄧宏彬
河北工程大學學報(自然科學版) 2013年1期
關鍵詞:模塊化
龐博,鄧宏彬
(1.河北工程大學機電工程學院,河北邯鄲056038;2.北京理工大學機電學院,北京100081)
蛇形機器人的冗余度極高,具有多自由度的運動能力,使其可以模仿出生物蛇的多種運動模式,在運動行進過程中蛇形機器人與地面多點甚至線或面接觸,運動穩定性好,對地形的適應能力強,在很多領域具有十分廣泛的應用前景。
目前研制出的蛇形機器人具有多種結構形式[1-3],可實現多種運動模式[4-8],蜿蜒運動作為生物蛇最典型的一種運動,是蛇形機器人運動模式研究的核心問題。本文以研制出的九關節蛇形機器人為研究對象,對蛇形機器人的蜿蜒運動機理進行了深入研究,在多體系統動力學仿真軟件Recurdyn中建立蛇形機器人的運動模型進行仿真,最后對仿真結果進行了分析和說明。
1 蛇形機器人蜿蜒運動機理
1.1 簡化的蜿蜒運動曲線
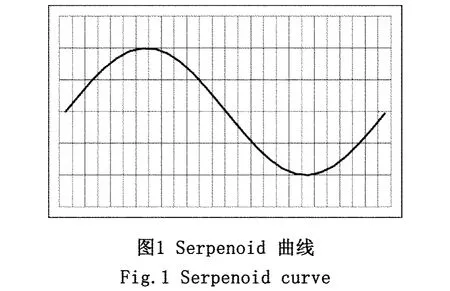
蛇進行蜿蜒運動時,通常采用 Serpenoid曲線[1]進行分析,如圖1所示。
一個周期內,Serpenoid曲線的曲率方程為

式中:l-蛇形機器人的總長;Kn-蛇形機器人體內傳遞波的個數;a-Serpenoid曲線的初始彎角; s-蛇形機器人沿Serpenoid曲線軸線方向的位移。
本文采用簡化的Serpenoid曲線[2]作為蛇形機器人步態的產生方式,弧長為s處的曲率定義為

式中:a-Serpenoid曲線的初始彎角;b-常數。
將式(2)對s積分,可以得到Serpenoid曲線上弧長為s處切線方向與水平方向的夾角。將Serpenoid曲線近似為長度為l的線段的集合,l趨近于無窮時,兩個相鄰長度為l的線段在弧長為s處的夾角為

實際中蛇形機器人模塊長度不可能無窮小,即l不可能趨近于無窮,以模塊實際長度來擬合Serpenoid曲線,仍可以近似模擬的蜿蜒運動。
1.2 蜿蜒運動步態的產生
蛇形機器人的模塊化關節長度為2l,當s=0,2l,4l,…時,蛇形機器人在各模塊化關節處的轉角為

式中:i-各關節的序號。
各關節的相對轉角確定后,可使蛇形機器人確立靜態的蜿蜒構型。蜿蜒運動中,蛇形機器人各個關節應沿Serpenoid曲線動態運動,s的取值應為隨時間變化的序列,設s=ct,ct+2bl,ct+ 4bl,…,其中c為常數。令A=-2asin(bl),ω= bc,β=2bl,動態情況下蛇形機器人在各模塊化關節處的轉角為

2 蛇形機器人的模型建立與仿真
2.1 蛇形機器人的模型結構
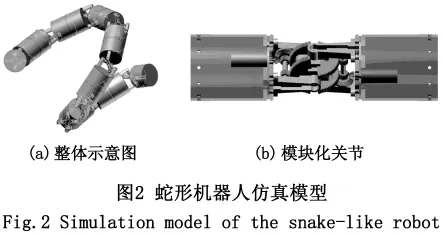
蛇形機器人模型如圖2所示,結構上采用模塊化關節設計,其整體機械結構由九個相同模塊串聯而成,各模塊的尺寸為:直徑65 mm,長238.5 mm。蛇形機器人的模塊化關節類似于一個萬向節機構,具有橫縱兩個方向的自由度,每個自由度由各自的電機和控制系統進行驅動與控制。通過模塊化關節連接而成的蛇體具有高冗余度,可以使蛇形機器人實現多種姿態與運動模式。
2.2 仿真環境設置
蛇形機器人的初始姿態利用三維設計軟件調整各段關節與萬向節的角度來實現,然后導入RecurDyn中設定參數后進行虛擬仿真,導入后模型如圖3(a)所示。RecurDyn的仿真環境設置如下:機器人各關節與地面使用實體接觸(Solid Contact),各參數設置如圖3(b)所示。
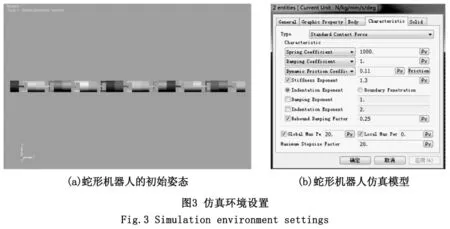
各關節與萬向節的約束采用轉動副(Joint),蛇形仿生機器人通過設定各轉動副(Joint)的運動(motion)來模擬電機驅動情況下各關節運動。運動(motion)選用位移模式,即設置各轉動副的位移時間函數。與地面水平的轉動副位移時間函數均設置為0,即蜿蜒運動情況下水平方向的轉動副不參與運動。與地面垂直的各轉動副位移時間函數設置為

式(6)中,n根據各轉動副位置依次取0~8,使參與運動的各關節轉動副相位依次滯后從而產生蜿蜒運動。Recurdyn中step函數為3次多項式逼近階躍函數,可用于定義一個光滑的階躍函數。
2.3 仿真
式(6)中,參數A的大小決定了蛇形機器人蜿蜒曲線擺動的幅度;β的大小決定了蛇形機器人體內形成波的個數。設置仿真時間為30 s,步數為1 000,使模型的運動達到穩定。仿真包含以下情況:
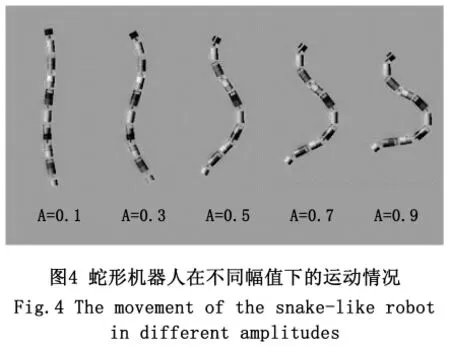
情況1:保持ω和β不變,改變A的值。設置式(6)中ω=1,為了使蛇形機器人體內形成一個波,取β=0.7。每次仿真改變一次A值。蛇形機器人在不同幅值下的運動情況如圖4所示。不同幅值下蛇形機器人的前進速度如表1所示。
情況2:保持A和β不變,改變ω的值。設置式(6)中A=0.7,為了使蛇形機器人體內形成一個波,取。每次仿真改變一次值。蛇形機器人在不同頻率下的運動情況如圖5所示。
不同頻率下蛇形機器人的前進速度如表2所示。
情況3:保持A和ω不變,改變β的值。設置式(6)中A=0.7,ω=1。每次仿真改變一次β值。蛇形機器人在不同形成波個數下的運動情況如圖6所示,不同頻率下蛇形機器人的前進速度如表3所示。

表1 不同幅值下蛇形機器人的前進速度Tab.1 The forward speed of the snake-like robot in different amplitudes

表2 不同頻率下蛇形機器人的前進速度Tab.2 The forward speed of the snake-like robot in different frequency

表3 不同形成波個數下蛇形機器人的前進速度Tab.2 The forward speed of the snake-like robot in different frequency
3 仿真分析
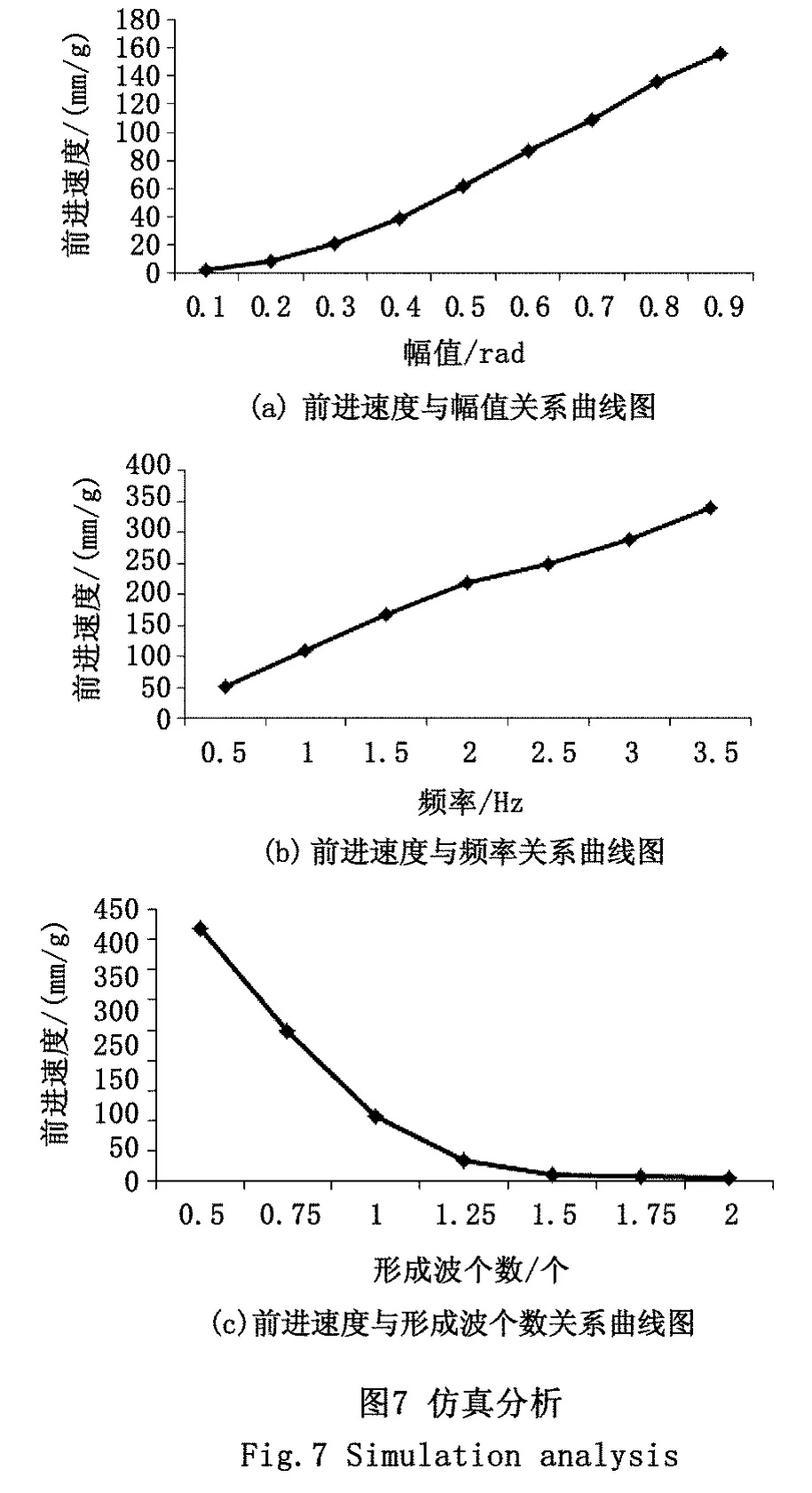
根據仿真數據繪制關系曲線如圖7所示。
1)前進速度與幅值關系曲線圖如圖7(a)所示,圖中可以看出,隨著幅值的增加,蛇形機器人的前進速度有著明顯的增加,實際中,蛇形機器人模塊化關節角函數的幅值由關節設計的最大轉角限制,設計的蛇形機器人前進速度最大的最優幅值為0.7rad。
2)前進速度與頻率關系曲線圖如圖7(b)所示,圖中可以看出,隨著關節角函數頻率的增加,蛇形機器人的前進的速度一直增加,實際中,蛇形機器人模塊化關節角函數的頻率受所選用電機的限制。
3)前進速度與頻率關系曲線圖如圖7(c)所示,圖中可以看出,隨著蛇形機器人體內形成波個數的增加,蛇形機器人的前進速度越來越小,但波的個數太少的話會影響蛇形機器人的前進方向,無法形成完整的蜿蜒曲線。
4 結論
1)隨著關節角函數幅值、頻率的增加,蛇形機器人蜿蜒運動前進的速度隨著增加。但是在實際中,關節角函數的幅值由關節設計的最大轉角限制,關節角函數的頻率受選用電機限制,因此通過合理地設計模塊化關節、選擇關節電機,可以增強蛇形機器人的蜿蜒運動性能。
2)當蛇形機器人模塊化關節數目與蜿蜒曲線長度一定時,在形成波個數滿足形成蜿蜒曲線的情況下,減少蛇形機器人蜿蜒曲線的形成波個數,有利于提高蛇形機器人前進速度。
3)提出的蛇形機器人能夠在仿真環境下完成預定的蜿蜒運動,對進一步的樣機實驗具有重要指導意義。下一步需要對蛇形機器人的運動步態規劃做進一步的完善,使其運動軌跡更加平滑,適合更多復雜的自然環境。
[1]HIROSE S.Biologically inspired robots-snake-like locomotors and manipulators[M].Oxford:Oxford University Press,1993.
[2]MA S G,TADOKORO N.Analysis of creeping locomotion of a snake-like robot[J].Autonomous Robots,2006,20:15-23.
[3]李斌,馬書根,王越超,等.一種具有三維運動能力的蛇形機器人的研究[J].機器人,2004,26(6):506 -509.
[4]孫紅,馬光榮.蛇形機器人一種基于Serpenoid曲線的蠕動步態機械設計與研究[J].機械設計與研究,2008,24(1):40-44.
[5]王光榮.蛇形機器人蠕動、蜿蜒運動運動特性的研究[D].上海:上海交通大學,2004.
[6]YAN CL,MA SG,LI B,et al.Modular universal unit for a snake-like robot and reconfigurable robots[J]. Journal of Advanced Robotics,2009,23(7-8):865 -887.
[7]WU XD,MA SG.Adaptive Creeping locomotion of a CPG-controlled snake-like robot to environment change[J].Journal of Autonomous Robots,2010,28 (3):283-294.
[8]王南,王晶,平恩順.基于ADAMS/Car的雙橫臂懸架的運動學建模與仿真[J].河北工程大學學報:自然科學版,2010,27(4):55-58.
猜你喜歡
海洋信息技術與應用(2022年1期)2022-06-05 07:38:22
裝備制造技術(2021年2期)2021-07-21 05:38:44
現代裝飾(2020年5期)2020-05-30 13:01:56
汽車與新動力(2019年5期)2019-11-07 05:20:16
系統管理學報(2018年3期)2018-08-13 01:05:42
中國核電(2017年2期)2017-08-11 08:00:56
流程工業(2017年4期)2017-06-21 06:29:52
流程工業(2017年4期)2017-06-21 06:29:50
石油化工建設(2015年2期)2015-12-01 04:16:44
中國教育技術裝備(2015年10期)2015-03-01 02:41:05
