基于SIHC仿真平臺的船舶航向控制算法性能測試
2013-04-08 06:45:43蔣嬌李麗娜陳國權趙晴
上海海事大學學報 2013年4期
關鍵詞:船舶
蔣嬌,李麗娜,陳國權,2,趙晴
(1. 集美大學 航海學院,福建 廈門 361021;2. 大連海事大學 航海學院,遼寧 大連 116026;3. 中國電信九江分公司,江西 九江 332000)
0 引 言
隨著世界海運事業的發展,船舶數量越來越多,船舶朝大型化、高速化方向發展,船舶的航行安全顯得越來越重要,這客觀上推動著船舶導航與自動化駕駛技術的發展.船舶在海上航行受到風、浪和流的影響,故只有正確控制和使用船舵才能使船舶在各種外界影響下保持航向或者改變航向,從而保證船舶安全迅速地從出發地到達目的地.自動舵具有減少人力、節約燃料、降低機械磨損等功能.目前,船舶航向控制領域出現各類先進的控制算法.為設計滿足不同指標要求及適應各種應用場合的航向智能控制算法,通過選擇若干主流算法集成到船舶智能操控(Ship Intelligent Handling and Control, SIHC)仿真平臺桌面系統進行性能測試.本文基于文獻[1]和[2]實現的算法及文獻[2]提出的控制算法評價方法,著重對該平臺集成的兩種航向控制算法進行初步的性能測試.
1 SIHC仿真平臺簡介
SIHC仿真平臺是用于船舶航行自動化基礎研究的仿真測試平臺,其中的本船具有航向和航跡兩種自動控制模式,能實現船舶自動避碰與航跡自動監控,可用于船舶智能避碰決策算法與智能控制算法測試.該平臺實現以下創新點:智能目標船功能;先進的仿真技術;集成6自由度液壓/電動平臺;接入船舶自動識別系統(Automatic Identification System, AIS)交通流功能;標準電子海圖平臺.本文測試使用的是SIHC仿真平臺的桌面系統,主要由1臺主控臺計算機、1臺目標船服務器、4臺本船計算機構成,本船集成有丹麥航海研究所(Denmark Marine Institute)開發的6自由度船模.
2 船舶航向控制算法原理
2.1 普通PID航向自動舵原理
6自由度船模自帶有普通PID航向自動舵.基于其自帶的船模參數,可以更好地確定PID的3個參數的初始值,從而達到較好的航向控制效果.普通PID航向自動舵結構及原理分別見圖1和2.從圖1可以看出,該自動舵實際上由一個傳統的PID航向自動舵和一個濾波器組成.
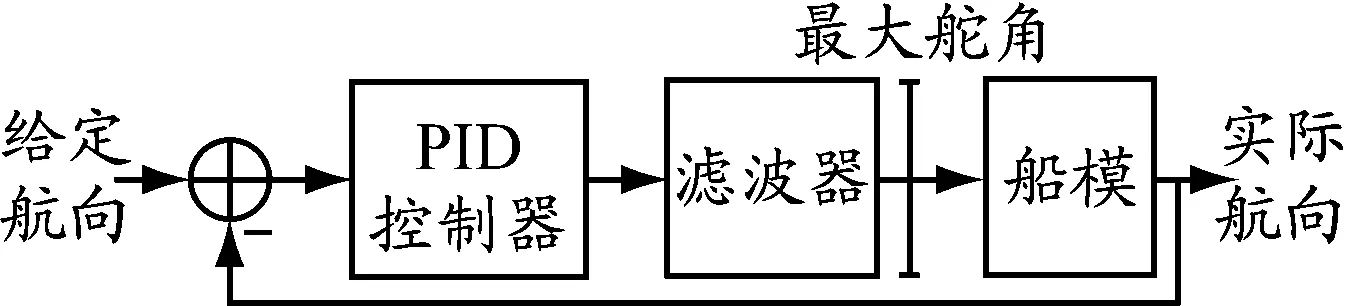
圖1 普通PID航向自動舵結構

圖2 普通PID航向自動舵原理
普通PID航向自動舵控制規律的傳遞函數形式為

式中:U(s)為輸出舵角;E(s)為輸入航向偏差;K為舵增益;TI為積分時間常數;Td為反舵時間; 1/Tg為濾波頻率;1/α為差異化系數.
2.2 模糊自整定PID航向自動舵原理
模糊自整定PID控制[1]運用模糊數學的基本原理和方法,把模糊控制規則的條件及其操作用模糊集表示,并把這些規則和有關信息作為知識存入計算機知識庫中,然后根據控制系統的實際響應情況運用模糊推理,自動實現對PID參數的最佳調整[3].模糊自整定PID控制算法由模糊自整定PID控制器、限幅環節和被控對象等3個部分組成,其原理見圖3.
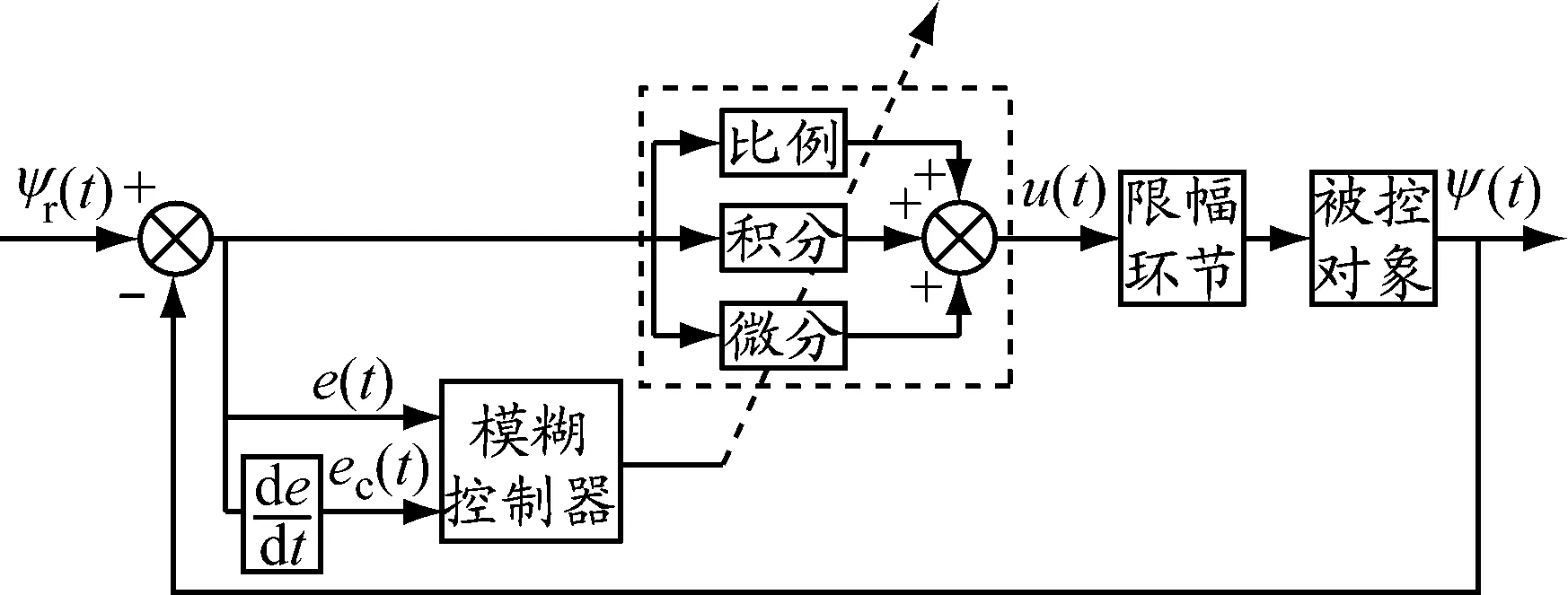
圖3 模糊自整定PID控制原理
模糊自整定PID控制算法在運行中不斷檢測誤差e(t)=ψ(t)-ψr(t)和誤差的變化率ec(t)=de(t)/dt,然后根據模糊規則(見表1~3)對PID的3個參數kp,ki,kd進行調整,以滿足不同e和ec對控制參數的不同要求,從而使被控對象具有良好的動、靜態性能.其中,ψ表示受控系統的航向角,ψr表示其設定值.
在船舶模糊自整定PID自動舵中,必須測量誤差和誤差的變化率即艏搖角速率ec.
在本設計中,作為輸入的e和ec的論域為
e,ec={-5,-4,-3,-2,-1,0,1,2,3,4,5}
作為輸出的修正量Δkp,Δki,Δkd的論域為
Δkp,Δki,Δkd={-5,-4,-3,-2,-1,0,1,2,3,4,5}
選取的輸入、輸出變量詞集[4]為
e,ec,Δkp,Δki,Δkd={NB,NM,NS,ZO,PS,PM,PB}
詞集中的元素依次分別代表負大、負中、負小、零、正小、正中和正大.
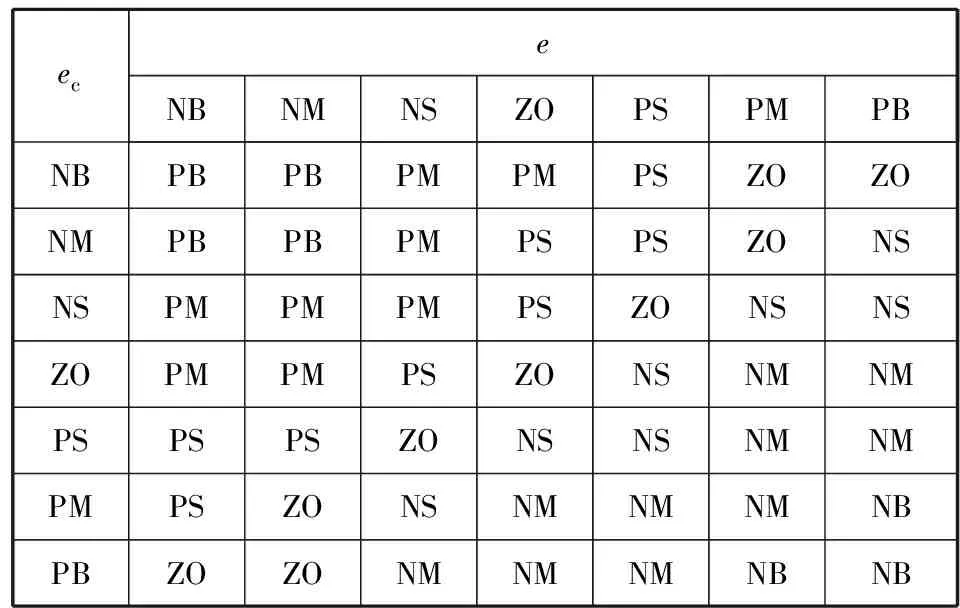
表1 Δkp的模糊控制規則[5]
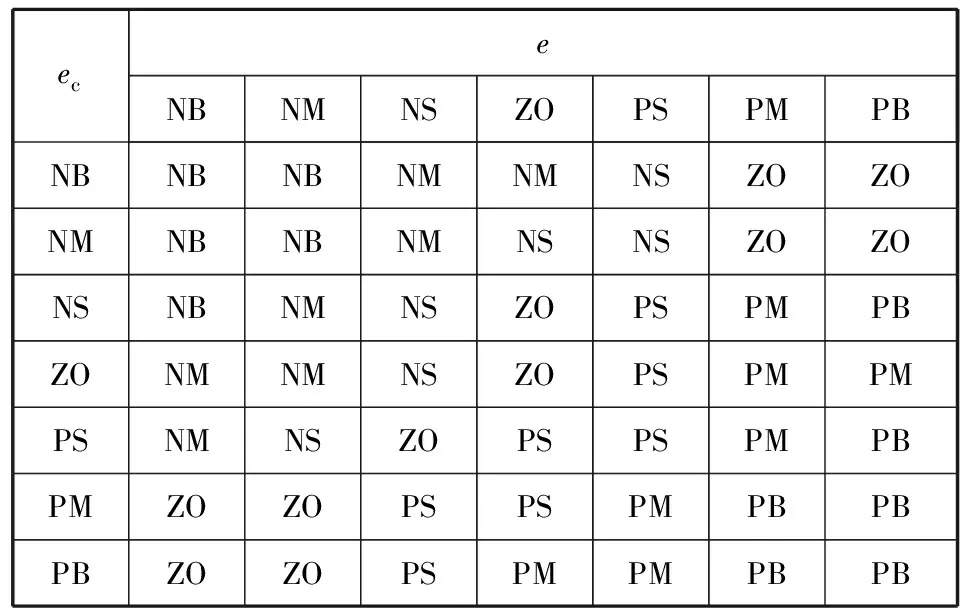
表2 Δki的模糊控制規則
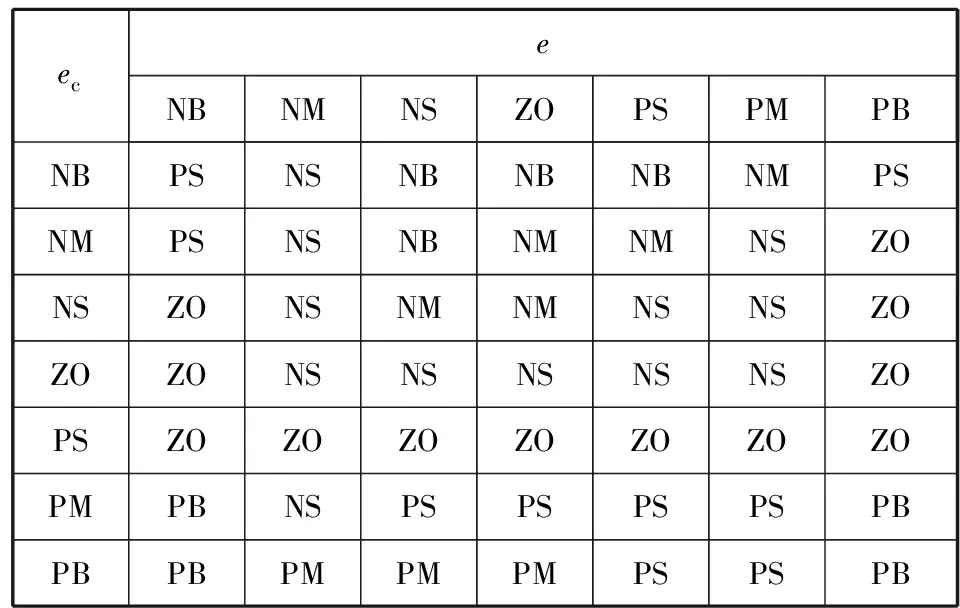
表3 Δkd的模糊控制規則
根據工程技術人員的技術知識和實際操作經驗,本設計中輸入、輸出變量的隸屬度函數曲線NB部分均取降半正態分布曲線,PB部分均取升半正態分布曲線,NM,NS,ZO,PS和PM部分均取三角分布曲線[6],因此可以得出各模糊子集的隸屬度.根據各模糊子集的隸屬度賦值表和各參數模糊控制模型,應用模糊合成推理設計PID參數的模糊矩陣表,查出修正量代入式(1)~(3):
在整個系統運行過程中,控制系統通過對模糊邏輯規則的結果處理、查表和計算,完成對PID參數的在線自整定.
3 航向控制算法性能評判方法
3.1 航向跟蹤評判方法
為使船舶自動舵具有航跡(線)自動保持能力,必然要求自動舵具有航向跟蹤功能,即在給定航向因接近計劃航向的轉向點需要改變的情況下,自動舵具有自動跟蹤航向變化的能力.[1]
根據定值自動控制系統的性能指標及經驗,航向跟蹤的性能指標主要由超調量、跟蹤響應速度、操舵次數、最大舵值和振蕩次數組成.為得到這5個指標的權值,針對航向跟蹤進行問卷調查.問卷中通過兩兩比較的方式讓被調查者在速度快、精度高、耗油少等3個因素中選擇最看重的因素.共發出問卷68份,速度快、精度高和耗油少被選中的次數分別為62,79和11.
問卷調查中的3個因素與這5個性能指標的相關程度有很大的差異:速度快是跟蹤響應速度指標的最大關聯因素;精度高是超調量指標的最大關聯因素;耗油少是操舵次數、最大舵值、振蕩次數這3個指標的最大關聯因素.因此,可以分別算出5個性能指標的相應權值:超調量指標權值w1為0.45;跟蹤響應速度指標權值w2為0.36;操舵次數、最大舵值、振蕩次數這3個指標的權值w3,w4,w5理論上應該均為0.06.但是這5個性能指標的權值和不為1.經研究發現振蕩次數指標比操舵次數和最大舵值這兩個指標相對更重要,故其權值理應比另外兩個大.以此得到超調量、跟蹤響應速度、操舵次數、最大舵值、振蕩次數這5個指標的權值依次分別為0.45,0.36,0.06,0.06,0.07.根據對船上工作人員的問卷調查,自動舵改向的最佳狀態是零超調、無振蕩、操舵兩次、舵向改變10°時的響應時間控制在300 s以內、最大舵值不超過10°.故得出改向時自動舵的5個性能指標的隸屬函數[10-11]如下:
超調量的隸屬函數
f(x)=e-x2(x≥0)
跟蹤響應速度的隸屬函數
操舵次數的隸屬函數
最大舵值的隸屬函數
振蕩次數的隸屬函數
f(x)=e-x2(x≥0)
3.2 航向保持評判算法
船舶自動舵的航向保持功能是在給定航向不變的情況下能確保船舶在外界環境干擾作用下具有保持既定航向的能力.航向保持的性能指標主要由保向精度和舵機能耗組成.航向保持的性能指標為
式中:J為總體性能指標值;N為采樣個數;ψ0(n)為設定航向;ψ(n)為實際航向;δn為當前舵角.對航向保持的評判主要從航向偏差和能耗方面考慮,所以J值越小,控制算法的航向保持性能越好.
為得到保向精度指標和舵機能耗指標的權值λ1和λ2,對一些有經驗的船舶駕駛人員和航海教學人員進行一次問卷調查.在發出的58份問卷中,減少航向偏差和減少舵機能耗被選中次數分別為43和15,由此可以得出λ1和λ2分別為0.74和0.26.
4 評判結果及分析
4.1 航向跟蹤測試方案與評判結果
考慮到不同船型及不同環境等因素,測試方案選取3種不同船型船模,即散貨船、集裝箱船和油船,另外為周全考慮又選取一條較小船模(巡邏艇),船模信息見表4.環境設置分為8個等級,風向為40°,波浪周期為5 s,波浪方向為220°,具體的風速與浪高對應關系見表5.測試過程考慮流的影響,流速設置為1 kn,流向為120°.
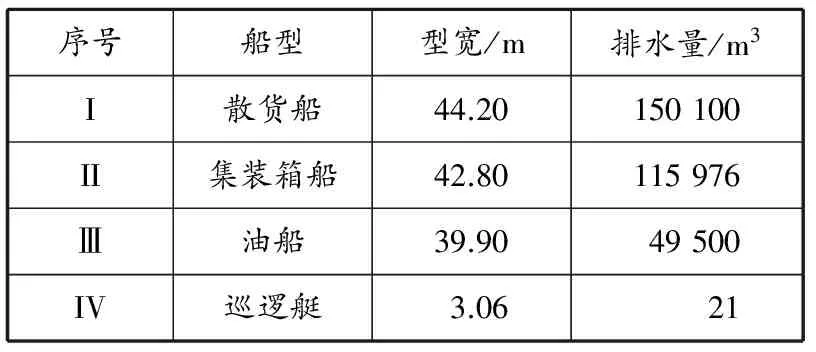
表4 測試方案船模基本信息
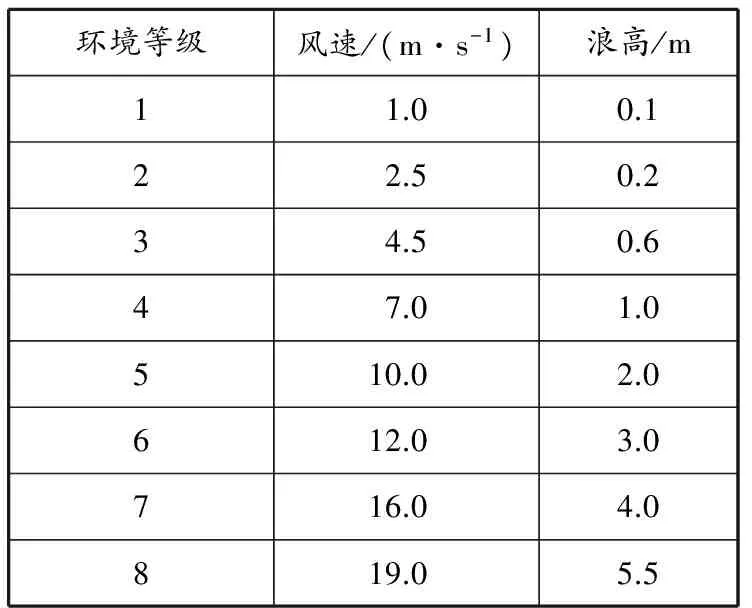
表5 測試方案環境設置
在同一海域設置本船1和本船2,測試過程中兩條船采用同樣的船模.設定船舶的初始速度為該船的服務速度,船舶初始航向為0°,船舶航行全過程中其車鐘都在FULL擋位.船舶開始運行后本船1和本船2分別采用模糊自整定PID航向自動舵和普通PID航向自動舵進行改向60°的操作,當兩船航向改到60°且穩定后,結束測試.利用平臺設計的接口,提取兩船的數據,然后利用MATLAB分別畫出兩船的實際航跡向曲線.圖4和5分別為船模III在環境7下的兩種自動舵的實際航向及舵角變化曲線,其中,實線和虛線分別為普通PID自動舵和模糊自整定PID自動舵控制下的變化曲線.
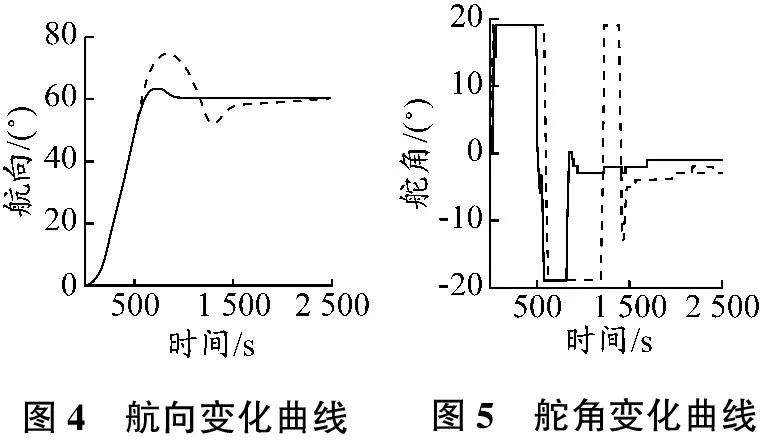
圖4 航向變化曲線 圖5 舵角變化曲線
再利用上述航向跟蹤性能評判方法對每次實驗數據進行處理,得到的評判結果見表6.
從表6可以明顯看出,在不同環境下兩種自動舵的控制性能基本接近,且穩定性都較好,但是在風浪等級較高的環境條件下亦或對于較小的船模,普通PID自動舵的性能稍好.同時可以看出,兩種自動舵對不同船型的控制性能有明顯差異(巡邏艇的控制效果最好,其次是集裝箱船,對油船的控制性能最差),這顯示出兩種自動舵對不同船型航向跟蹤的適應性存在不足.
4.2 航向保持測試方案評判結果
航向保持測試方案的環境設置和船模選取與航向跟蹤測試方案一致.在同一海域設置本船1和本船2,測試過程中兩船采用同樣的船模,設定船舶的初始速度為該船的服務速度,船舶的初始航向為60°,船舶航行全過程中其車鐘都在FULL擋位.船舶開始運行后本船1和本船2分別采用模糊自整定PID和普通PID航向自動舵保向,當兩船的航向都穩定在60°時,結束測試.根據第3.2節的航向保持評判算法,利用MATLAB對實驗輸出的船首向及舵角等數據進行處理,所得評判結果見表7.
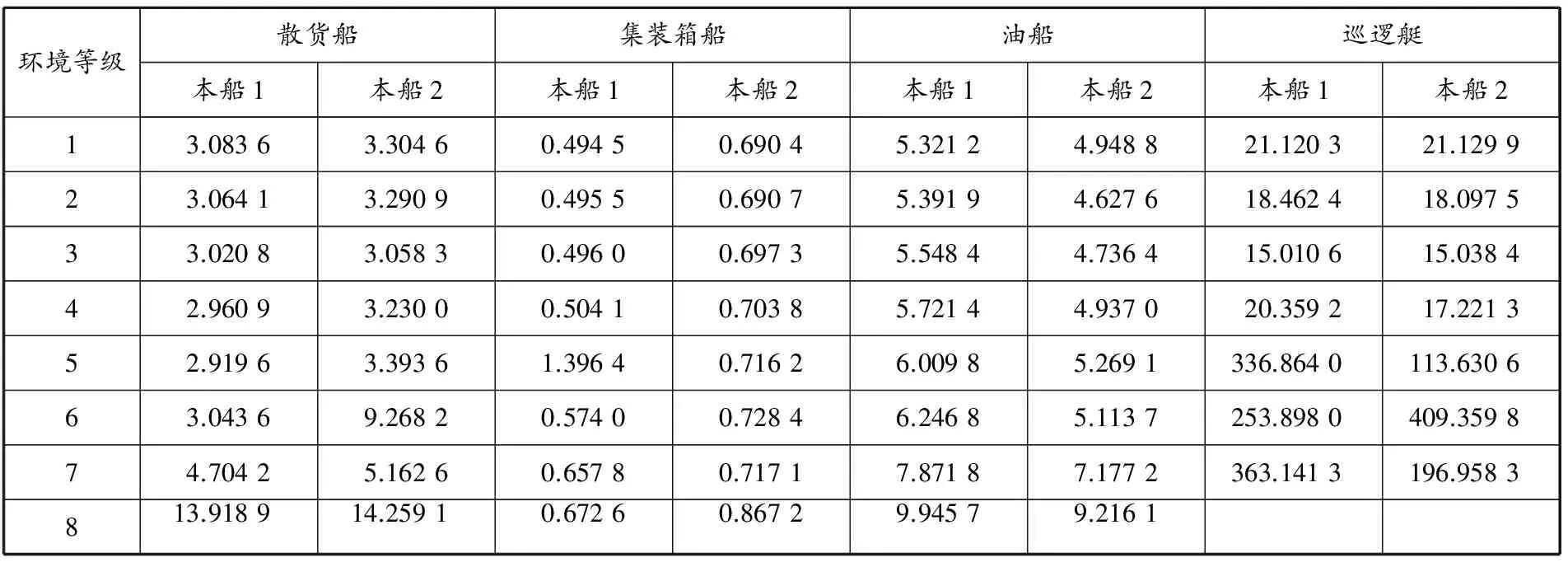
表7 航向保持評判結果
由船模I和II的評判結果分析可知:在航向保持過程中本船1的總體性能指標值比本船2的小,即模糊自整定PID自動舵比普通PID自動舵有更好的航向保持性能.對于船模Ⅲ,普通PID自動舵的航向保持性能較好.由于船模IV較小,在風浪等級較高的環境下兩種自動舵對其喪失航向保持能力.表7同時顯示,模糊自整定PID自動舵對集裝箱船的航向保持控制性能最好.
5 結束語
借助SIHC仿真平臺開展船舶自動控制算法仿真及性能測試,利用MATLAB工具,分別從航向跟蹤和航向保持兩個方面對該平臺集成的普通PID自動舵和模糊自整定PID自動舵的控制性能進行測試.從測試結果可知:在航向保持方面,就一般的船型而言,模糊自整定PID自動舵的性能優于普通PID自動舵;在航向跟蹤方面,普通PID自動舵和模糊自整定PID自動舵的控制性能近乎一致;在某些環境下,普通PID自動舵對某些船型的控制性能會稍勝一籌,但對不同船型的適應性有待日后進一步優化.在航向控制評判算法方面,航向跟蹤性能評判的隸屬函數的臨界值還有待于進一步細致優化,以更客觀精準地分析比較不同船舶航向控制算法性能的優劣.
參考文獻:
[1] 李麗娜, 楊神化, 熊振南, 等. 船舶擬人智能避碰決策理論框架的研究[J]. 中國航海, 2009, 32(6): 30-34.
[2] ZHAO Q, LI L, CHEN G. Research on fuzzy self-tuning of PID autopilot[C]//ICTE 2011, ASCE, 2011: 985-990.
[3] 趙晴. 船舶航跡智能控制算法的研究[D]. 廈門: 集美大學, 2012.
[4] 劉洋, 米偉, 郭晨. 船舶航向模糊自整定操舵控制器的研究[J]. 中國航海, 2010, 33(1): 71-75.
[5] 季本山. 基于PLC的模糊PID船舶自動舵[J]. 上海海事大學學報, 2009, 30(4): 57-62.
[6] 陳水利, 李敬功, 王向公. 模糊集理論及其應用[M]. 北京: 科學出版社, 2005: 42-58.
[7] 李麗娜, 張壽桂. 航海自動化[M]. 2版. 北京: 人民交通出版社, 2012: 70-83.
[8] HTIN Aung Kyaw, XIAO Yingjie. Assessment on the Yangon river channel based on fuzzy synthetic evaluation[J]. 上海海事大學學報, 2007, 28(1): 50-56.
[9] 陳辰, 胡甚平. 基于模糊DEA的航運公司安全管理有效性評價[J]. 上海海事大學學報, 2012, 33(1): 12-15.
[10] 張曉平. 模糊綜合評判理論與應用研究進展[J]. 山東建筑工程學院學報, 2003, 18(4): 90-93.
[11] 陳錦標, 吳廣宇, 應士君. 基于灰色模糊綜合評估法的大型船舶模擬操縱評價[J]. 上海海事大學學報, 2008, 29(4): 1-5.
猜你喜歡
艦船科學技術(2022年14期)2022-09-22 03:08:26
艦船科學技術(2022年14期)2022-09-22 03:07:40
機械工業標準化與質量(2022年6期)2022-08-12 02:07:42
艦船科學技術(2022年2期)2022-03-29 01:12:44
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學)(2019年10期)2020-01-18 09:16:22
船舶標準化工程師(2019年4期)2019-07-24 07:21:12
軍工文化(2017年12期)2017-07-17 06:08:06
中國船檢(2017年3期)2017-05-18 11:33:09
船海工程(2015年4期)2016-01-05 15:53:30