基于遇卡識別的改進Kalman濾波器模型-加速度校正方法
2013-04-27 11:16:52賴富強孫建孟李光云
中國石油大學學報(自然科學版) 2013年6期
賴富強,孫建孟,李光云
(1.重慶科技學院復雜油氣田勘探開發重慶市重點實驗室,重慶401331;2.中國石油大學地球科學與技術學院,山東青島266580)
FMI成像測井數據采集系統獲取的“記錄深度”,一般是在井口按照規則的電纜深度間隔記錄,而井下儀器沿著井軸的實際位置才是“真實深度”。眾所周知,井下的“真實深度”和井口的“記錄深度”并不完全一致,存在著一定的偏差,從而導致測井曲線和圖像出現異常現象,特別是在高分辨率電成像測井儀(FMI)中表現尤為明顯[1]。其原因主要有兩點:一是由于井壁的粘滯作用,引起儀器在井下作緩慢的非勻速運動,同時連接儀器的電纜具有彈性,不能及時將這種非勻速運動反映到井口,造成電纜記錄深度與儀器真實深度之間出現偏差,導致成像圖上出現鋸齒現象;二是由于井斜、井眼不規則以及井壁泥餅等對儀器的阻尼作用,導致儀器在井下被“卡停”以及電纜張力擺脫靜摩擦力“解卡”后作輕微的“yo-yo”滑動現象,在成像圖上呈現出整段的壓縮和拉伸現象。這兩種情況將導致成像圖像出現嚴重的失真,掩蓋了地層的真實情況,嚴重影響地質家的判斷,因此需要通過加速度校正來恢復采樣數據對應的真實深度,消除儀器非勻速運動引起的粘滯滑動區域和遇卡區域的圖像異常現象。加速度校正方面,前人做了許多相關研究:毛志強[2](1991)對測量的加速度信息進行積分來校正地層傾角測井數據;肖加奇[3](1994)采用遞推最小二乘法對微電阻率掃描測井曲線進行了加速度和速度校正;國外哈里伯頓公司利用電纜張力和加速度信息進行速度校正(Robert[6],2003);斯倫貝謝公司采用Kalman濾波方法預測儀器的真實深度(Chan[4],1985;Howard[5],1991;Belougne[1],1996;王敏[7];賴富強等[12])。綜合分析認為,對加速度曲線進行二次積分得到深度的方法,由于很難消除累積積分誤差而導致結果失準;而Kalman濾波方法對儀器真實深度的預測和校正效果較好,賴富強等[12-13]曾對傳統的卡爾曼濾波器模型加速度校正方法進行了研究,對儀器的一般非勻速運動導致的異常現象進行了有效的校正,但是傳統Kalman濾波器模型沒有對儀器在井下遇卡時和解卡后的復雜運動狀態進行詳細分析,無法得到準確的濾波系數,對“遇卡區域”適應性較差。因此,筆者首先對儀器在井下的復雜運動狀態進行詳細分析識別出儀器的“遇卡區域”,然后利用遇卡識別結果對傳統的Kalman濾波器數學模型進行改進,充分考慮相鄰遇卡現象的疊加情況,最后用FMI實測數據對改進Kalman濾波器模型進行驗證。
1 儀器遇卡的識別方法
儀器遇卡判斷基于一個事實:由于電纜具有彈性,儀器的速度不可能在任何一個井段內保持固定值,除非是一直等于電纜速度(但在實際測井中不太可能出現如此理想的情況)[1]。因此,當測量的加速度曲線在一定的時間窗內表現為平直線段,且接近零值,同時在時間窗起點處儀器預測速度遠小于井口電纜速度時,基本可以判定儀器遇卡。另外,加速度曲線在遇卡的時候,會出現一個阻尼衰減振動,卡停瞬間出現很大的負值,恢復時出現一個極大的正值,同時電纜張力曲線在遇卡時逐漸增大,而電扣所測的電導率曲線在儀器遇卡時一般呈直杠形,在儀器解卡過程中被壓縮[7]。
根據上述儀器遇卡判斷原理,本文中采用的儀器遇卡識別方法見流程圖1,本方法最終生成一個儀器遇卡指示函數I(k),當I(k)=1時,表明儀器遇卡,否則I(k)=0,可以用來優化Kalman濾波系數。從圖1可以看出,該方法在每個深度點上,首先檢測上一個點是否遇卡,如果沒有,那么檢測儀器的預測速度是否低于門限值δ,如果低于門限值,那么繼續檢測加速度在一定窗長內的方差和絕對平均值是否分別低于門限值ε1和ε2,如果這些條件都滿足的話,再附加檢測加速度過零點位置的能量是否大于窗口內其他所有點的能量,滿足的情況下,加速度過零點的位置為儀器遇卡的起始位置,設置I(k)=1,完成一次循環判斷。如果在當前循環開始的時候已經遇卡,那么就不用進行儀器速度和是否過零點的檢測,只需要檢測加速度的方差和均值是否滿足遇卡條件,當不滿足遇卡條件的情況下,窗口內加速度最后一個過零點的位置為儀器解卡的位置,之前都視為遇卡區域。至此,完成一個遇卡區域的循環判斷,繼續移動深度點完成整個井段的探測。
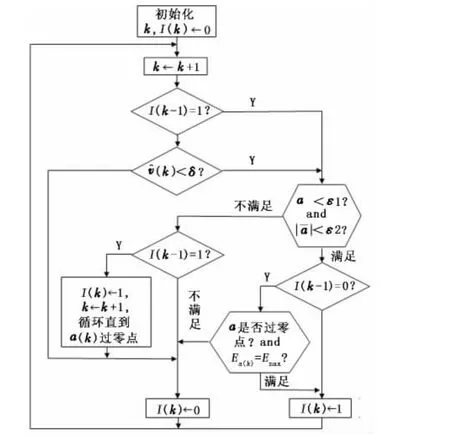
圖1 儀器遇卡識別方法流程圖Fig.1 Flow chart of instrument sticking recognition method
圖2是以FMI實測數據為例,利用上述遇卡識別方法對10 m長的電成像測井數據進行識別得到的成果曲線圖,在井段2554.5~2555.1 m、2556.25~2556.35 m、2556.8~2557 m、2560.35~2560.58 m、2562.65~2 562.82 m五處儀器遇卡,加速度曲線(FCAZ)在遇卡時出現一個極小值,然后在解卡是出現一個極大值,而張力曲線(TENS)遇卡時逐漸增大,解卡時突然減小,電阻率曲線在遇卡過程中出現直杠現象,解卡過程中出現被壓縮現象,在2554.5~2555.1 m處比較明顯。值得說明的是,電成像測井儀器的測斜系統和測量電扣之間存在著一個深度差,故極板電扣曲線和加速度曲線并不是對齊的。最后一道是根據加速度、速度和電纜張力曲線識別出來的遇卡指示線,1代表遇卡,0代表正常,由圖可知,采用本文的方法非常準確地識別出了儀器的遇卡情況。
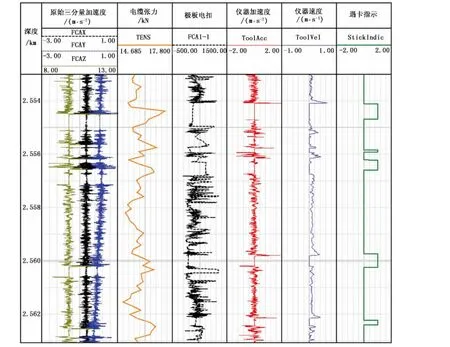
圖2 儀器遇卡識別成果曲線圖Fig.2 Result curves of instrument sticking recognition
2 傳統Kalman濾波器-加速度校正方法
Kalman濾波器是由Kalman提出的一種遞推式濾波方法,即用一個狀態方程和一個測量方程來完整地描述線性動態過程[8-9],其在許多領域得到廣泛應用[10-11]。本中將Kalman濾波器應用到測井數據采集與預處理系統中,首先建立了文獻[7]提出的傳統Kalman濾波器-加速度校正方法,然后對其校正效果進行驗證分析,最后提出改進方案。
傳統Kalman濾波器-加速度校正方法的狀態方程表示為

式中,a(k)、v(k)、z(k)為k時刻儀器的加速度、速度和深度;T為采樣時間間隔,引入na(k)表示a(k)在測量以及預測過程中可能帶來的誤差,將式(1)展開就是勻加速度運動的速度和位移公式,上標“-”表示預測前的值,“+”表示預測后的值。同時,設電纜深度為y(k),ny(k)用來衡量電纜深度與儀器真實深度之間的瞬時誤差,測量方程可表示為

傳統Kalman濾波器-加速度校正方法中,式(1)中的na(k)和式(2)中的ny(k)均被假設為均值為零的高斯白噪聲,均方差(k)(k)為常數[7]。由此構造出加速度校正的Kalman濾波預測器模型如下:

式中,G1(k)和G2(k)為反饋增益,由誤差協方差矩陣 P(k)推導得出[13],詳見文獻[7]。
由式(1)、(2)、(3)組成傳統的Kalman濾波器-加速度校正方法,以此預測出每個k時刻的儀器速度和真實深度,最后利用Akima插值方法[13]對真實深度對應的極板數據進行重采樣并重新生成FMI成像圖像。圖3是本文采用傳統Kalman濾波器-加速度校正方法對一段FMI實測數據進行編程處理得到的結果。經過對比可以看出,在“粘滯滑動區域”(圖3中上下兩個矩形虛線框所示,該區域加速度和速度曲線波動較小,儀器作非勻速運動,但沒有遇卡):原始電成像圖上層理特征出現鋸齒和錯動現象,采用傳統Kalman濾波器-加速度校正方法能較好地恢復地層的層理特征,消除錯動現象,校正效果明顯優于采用直接二次積分法得到的校正圖像;而在“遇卡區域”(圖3中間矩形點線框所示,該區域儀器加速度波動較大,預測速度出現零值,遇卡指數曲線指示儀器遇卡):原始電成像圖上出現大段壓縮和拉伸現象,采用傳統Kalman濾波器-加速度校正方法和直接二次積分法得到的校正圖像效果均不理想。
經過多次試驗分析得出,采用傳統Kalman濾波器-加速度校正方法能夠對“粘滯滑動區域”的非勻速運動起到較好的校正效果,但在“遇卡區域”的校正效果較差。原因在于:當儀器遇卡和解卡時,真實深度與記錄的電纜深度之間的偏差ny(k)急劇增加,如果此時不實時調整濾波器預測模型中對電纜深度實測值的依賴比重(k),會嚴重影響預測結果,但傳統Kalman濾波器-加速度校正方法中(k)設置為常數,沒有進行針對處理,故對“遇卡區域”的校正效果不理想。
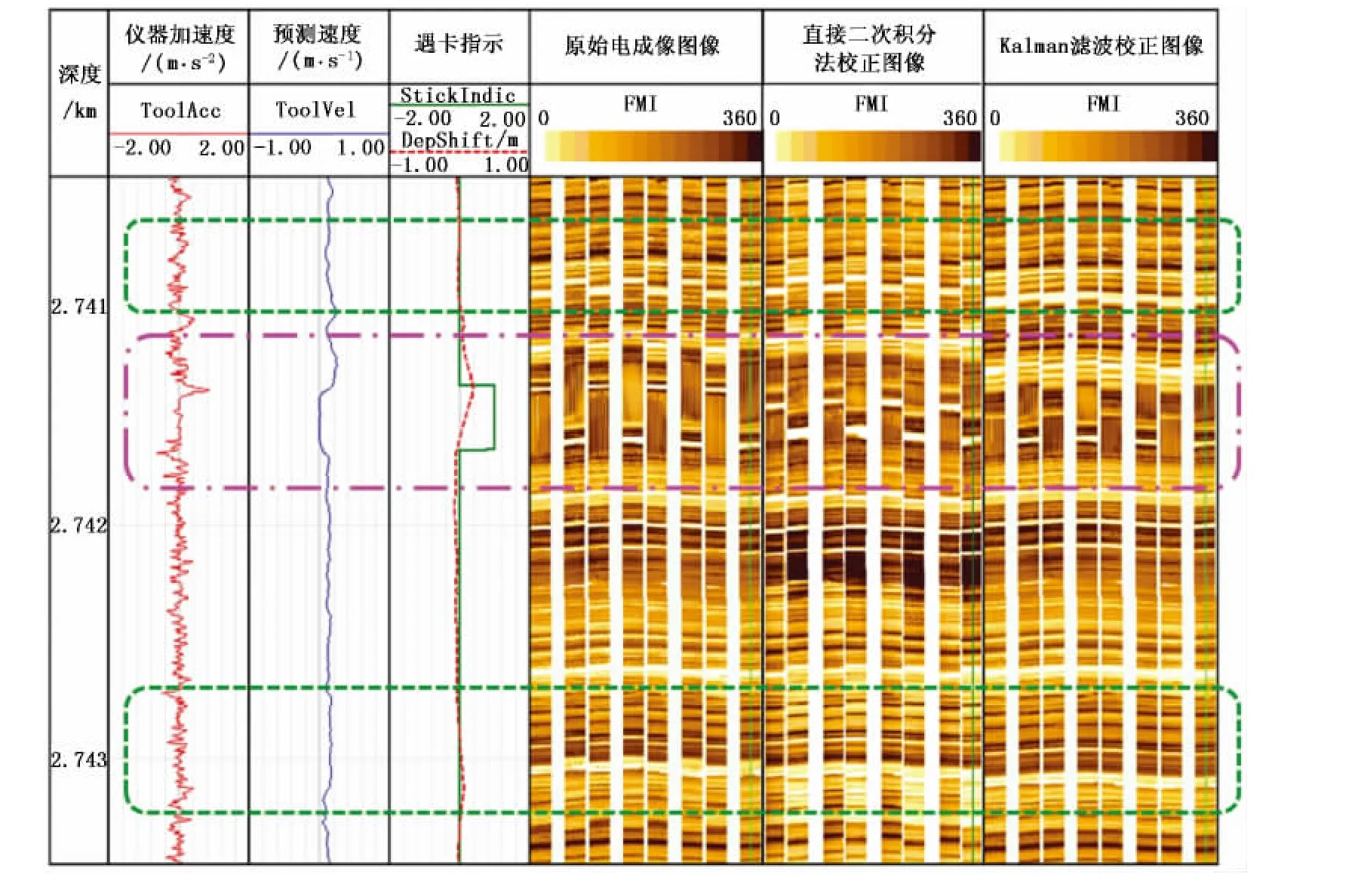
圖3 傳統Kalman濾波器-加速度校正成果對比圖Fig.3 Result of traditional Kalman filter model-acceleration correction method
3 改進的Kalman濾波器-加速度校正模型
鑒于傳統Kalman濾波器-加速度校正方法對“遇卡區域”的不適應,本文提出利用遇卡識別結果實時改進傳統Kalman濾波器模型的方法,適應“遇卡區域”的加速度校正。具體是針對Kalman濾波器模型中影響反饋增益矩陣和誤差協方差矩陣的電纜深度測量誤差函數k)進行改進,從儀器遇卡前、儀器遇卡時和儀器解卡后三個方面進行考慮。
模型改進的指導思想是:儀器遇卡前,Kalman濾波器模型不作調整,沿用傳統Kalman濾波器模型k)為常數;當儀器遇卡時,電纜測量深度的誤差逐漸增加,Kalman濾波器預測模型應減小對電纜測量深度的依賴比重,更多地依賴加速度計測量值來進行模型外推預測,因此此時k)應設計為實時的增大來反映“遇卡區域”電纜測量深度誤差的增加;當儀器解卡后(k)應設計為逐漸減小,直至恢復到遇卡前的狀態。根據這一指導思想,又由于σy(k)將與電纜深度y(k)成比例關系,將(k)設計為

式中,c為常數;vc(k)為電纜速度;f(k)設計為I(k)的函數,實時改變(k)值。f(k)由試驗分析推導而來,當儀器遇卡前,f(k)=0;當儀器遇卡時,f(k)逐漸增加使σy(k)增大,反映電纜測量深度誤差增加(圖4的ab段);當遇卡結束時,f(k)達到最大值,并保持一定時間不變后才逐漸減小恢復到零(圖4的bc段),這樣設計的目的在于儀器解卡后可能做復雜的“yo-yo”運動,電纜的測量深度仍然不可靠,所以給電纜系統一定的時間恢復到常態,這里的一定時間設計為儀器遇卡的時間長度;儀器解卡后,f(k)逐步減小,使σy(k)逐漸恢復到常態(圖4的cd段)。
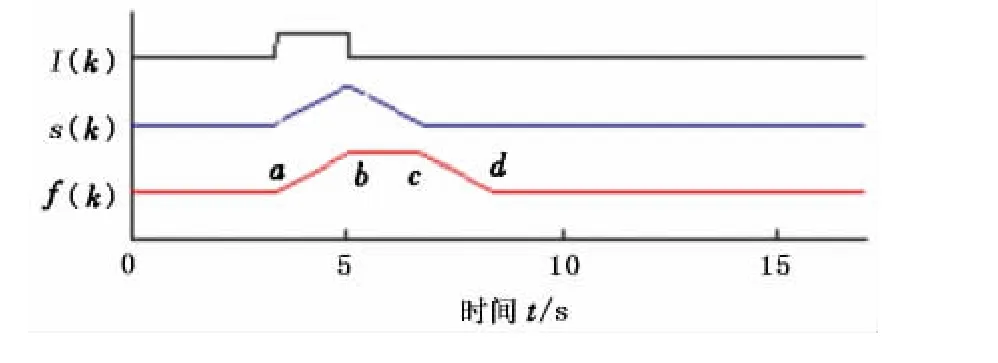
圖4 f(k)的設計示意圖Fig.4 Schematic diagram of f(k)
在f(k)設計試驗過程中發現,如果在f(k)恢復到零之前,儀器又遇到遇卡現象,那么f(k)變得比圖5(a)更為復雜,因為兩次遇卡情況疊加在一起,f(k)就得考慮上一次遇卡和新的遇卡現象的累積效應,圖5(b)~(e)分四種情況充分考慮了兩次遇卡的疊加現象。圖5(b)和圖5(c)均顯示了新的遇卡發生在f(k)減小之前,而圖5(b)和圖5(c)的區別是第二次遇卡時間比第一次短和長;圖5(d)和(e)都顯示了新的遇卡發生在f(k)減小之后,同樣圖5(d)和圖5(e)的區別同樣是第二次遇卡時間比第一次短和長;圖5(f)為新的遇卡發生在f(k)返回零之后,即儀器正常運行后的又一次遇卡,即為圖5(a)現象的重復。通過對圖5六種遇卡情況進行分析,最終推導出Kalman濾波器改進模型中f(k)的表達式:
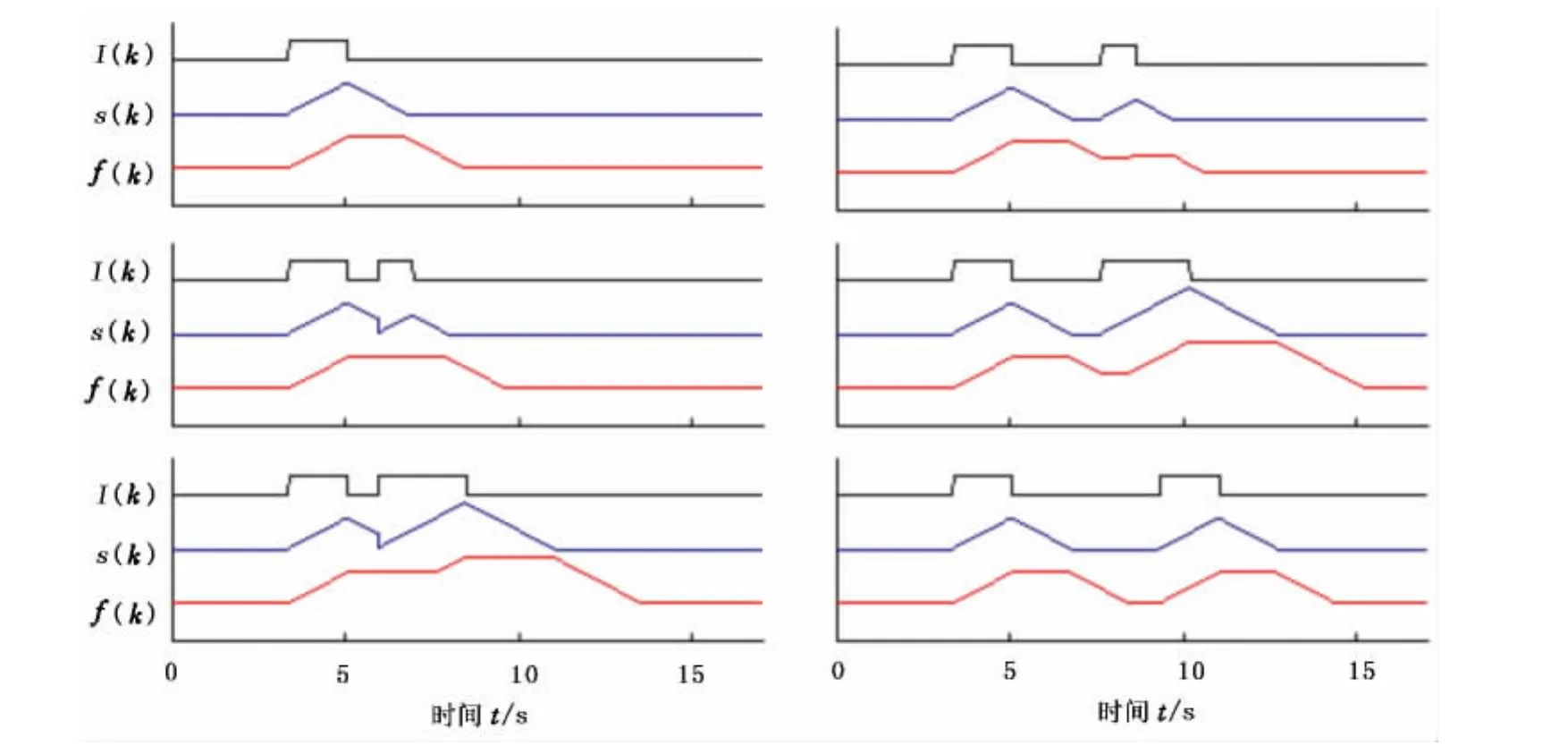
圖5 儀器遇卡后各種情況下f(k)隨I(k)變化的示意圖Fig.5 Schematic diagram of all kinds of superposition between two adjacent sticking events

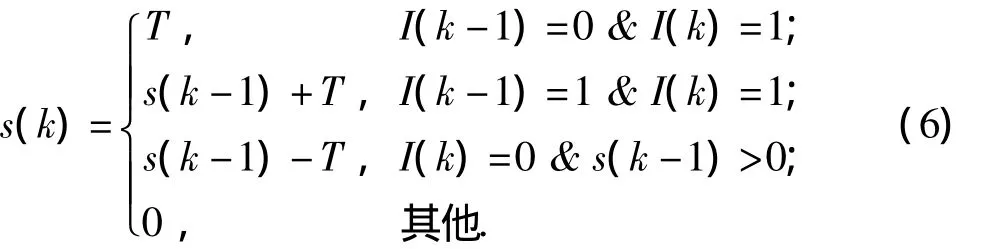
其中s(k)為中間變量,直接隨I(k)變化,設計為
4 應用效果分析
應用改進的Kalman濾波器-加速度校正方法,對圖3所示的FMI實測數據進行重新處理,并將加速度校正后的成像圖像與傳統Kalman濾波器-加速度校正方法得到的圖像進行對比分析,結果見圖6。

圖6 改進Kalman濾波器-加速度校正成果對比圖Fig.6 Result of improved Kalman filter model-acceleration correction method
可以看出:在“粘滯滑動區域”(圖6(a)中上下兩個矩形虛線框所示),采用改進Kalman濾波器-加速度校正方法能夠很好地恢復地層的層理特征,消除錯動現象,與傳統Kalman濾波校正效果相當;而在“遇卡區域”(圖6(a)中間矩形點線框所示),傳統Kalman濾波校正圖像上仍然存在壓縮和拉伸現象,而改進Kalman濾波校正圖像完全消除了由于儀器遇卡導致的大段壓縮、拉伸現象,使地層的層理特征得以清晰呈現(見圖6(a)中遇卡區域內的橢圓形虛線框)。證明了改進后的Kalman濾波器-加速度校正方法的正確性和優越性:既能校正“粘滯滑動區域”的一般非勻速運動,又能解決“遇卡區域”的拉伸壓縮現象。將改進Kalman濾波器-加速度校正方法應用到相鄰井段(2 558.5~2 561.5 m),圖6(b)所示的加速度校正成果圖例再次驗證了方法的有效性。圖6(b)虛線框區域(2560.05~2 560.7 m)儀器明顯遇卡,原始電成像圖上底部出現嚴重的拉伸、頂部出現壓縮現象,傳統的Kalman濾波模型在一定程度上緩減了圖像的拉伸壓縮現象,但是圖像上仍然存在小段拉伸假象,而改進Kalman濾波器-加速度校正方法的校正結果完全消除了圖像的拉伸壓縮現象,使地層的裂縫、層理等細微特征得以重現。
5 結論
(1)提出的FMI成像測井儀器遇卡識別方法以及在此基礎上改進的Kalman濾波器模型-加速度校正方法,有效地解決了由井下儀器非勻速運動引起的“粘滯滑動區域”圖像鋸齒現象和“遇卡區域”大段圖像壓縮拉伸現象,與直接二次積分法和傳統的Kalman濾波器模型-加速度校正方法相比更具優越性和適應性。
(2)由于井下儀器電纜的彈性并不規則,Kalman濾波器模型中ny(k)并不是一個標準的白噪聲隨機過程,更精確的模型需要更加詳細的探頭和電纜系統物理參數,這些可靠性參數很難獲取,預測結果表明經過本文改進的Kalman濾波器白噪聲模型足以應付井下儀器出現的大多數非勻速情況,包括“yo-yo”現象。
(3)該方法不僅適用于FMI成像測井,同樣適用于其他成像測井系列,尤其有助于改善國產成像儀器圖像的質量,具有推廣應用價值。
[1] BELOUGNE V,FAIVRE O,JAMMES L,et al.Real time speed correction of logging data:Thirty-sixth Annual Logging Symposium,New Orleans,June 16-19,1996[C].Houston:SPWLA,1996.
[2] 毛志強.現代地層傾角測井速度校正方法[J].江漢石油學院學報,1991,13(1):38-43.MAO Zhi-qiang.A method for logging speed correction in modern diplog[J].Journal of Jianghan Petroleum Institute,1991,13(1):38-43.
[3] 肖加奇,陳文榮,王哲然.用遞推最小二乘法對微電阻率掃描測井進行速度與加速度校正[J].測井技術,1994,18(3):204-211.
XIAO Jia-qi,CHEN Wen-rong,WANG Zhe-ran.The speed and acceleration correction of micro resistivity scanner logs with recursive least square algorithm[J].Well Logging Technology,1994,18(3):204-211.
[4] CHAN DSK.Method and apparatus for measuring the depth of a tool in a borehole:US,4545242[P].1985-10-08.
[5] HOWARD A Q.Depth determination system using parameter estimation for a downhole well logging apparatus:US 5019978[P].1991-05-28.
[6] ROBERT W S.Speed correction using cable tension:US,6618675[P].2002-12-26.
[7] 王敏,孫建孟,賴富強,等.全井眼地層微成像儀測井圖像失真的恢復技術[J].中國石油大學學報:自然科學版,2010,34(2):47-51.
WANG Min,SUN Jian-meng,LAI Fu-qiang,et al.Recovery technology of distorted image from fullbore formation micro imager[J].Journal of China University of Petroleum(Edition of Natural Science),2010,34(2):47-55.
[8] KALMAN R E.A new approach to linear filtering and prediction problems[J].Journal of Basic Engineering,1960,82(1):35-45.
[9] KALMAN R E,BUCY R S.New results in linear filtering and prediction theory[J].Journal of Basic Engineering,1961,83:95-107.
[10] ANDERSON BDO,MOORE J B.Optimal filtering[M].Englewood Cliffs,NJ:Prentice-Hall,1979.
[11] 邵才瑞.井筒數據的Akima插值重采樣方法[J].測井技術,2004,28(2):112-114.
SHAO Cai-rui.An Akima interpolation method for borehole data resampling[J].Well Logging Technology,2004,28(2):112-114.
[12] 賴富強,孫建孟.基于卡爾曼濾波的FMI成像測井加速度校正研究[C]//中國地球物理學會第二十五屆年會論文集.合肥:中國科學技術大學出版社,1999.
[13] 賴富強.電成像測井處理及解釋方法研究[D].青島:中國石油大學地球科學與技術學院,2011.
LAI Fu-qiang.Micro-resistivity image logging processing and interpretation methods research[D].Qingdao:School of Geosciences,China University of Petroleum,2011.
猜你喜歡
中學生數理化·七年級數學人教版(2020年11期)2020-12-14 06:59:52
藝術品鑒證.中國藝術金融(2018年8期)2019-01-14 01:14:28
藝術品鑒證.中國藝術金融(2018年10期)2019-01-08 02:44:26
藝術品鑒證.中國藝術金融(2018年12期)2018-08-26 06:03:48
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
電測與儀表(2015年5期)2015-04-09 11:30:52
