汽車駕駛員視覺注意特性及信息處理結構模型的構建
2013-07-19 01:57:16胡科偉夏如艇林文君余琳琳倪瑩瑩
中國科技信息 2013年21期
胡科偉 夏如艇 林文君 余琳琳 倪瑩瑩
臺州學院機械工程學院, 浙江 臺州 318000
前言
汽車駕駛是依據交通環境信息作出視覺感知、目標判斷和車輛操作的過程,道路交通系統是人、車輛和環境三要素構成的復雜系統。駕駛過程中若駕駛員的視覺適應能力、感知及判斷能力下降,將可能引發安全事故。盡管引發事故的因素有很大,如, 駕駛違章、氣候條件、車速、道路條件等,但視覺感知與目標判斷的正確與否是重要原因之一。駕駛員是一個復雜的主觀個體,能依據先驗知識作出判斷和操作,是交通系統的核心,在協調和控制交通系統中起主導作用并決定其性能。車輛是由人駕駛的是客觀無意識的。交通系統中的感知信息,包括行駛車輛的形狀與顏色、道路寬窄與車道數量信息、路面標識與標志,駕駛員生理心理感知變化等是根據駕駛員自身的主動視覺特性進行及時的并行處理。因此,對于駕駛過程中的人車環三要素構成的交通系統模型的構建需要深入研究,在分析駕駛員動態視覺行為特性的基礎上,對駕駛員的視覺處理信息的過程進行詳細分析,深入揭示其內在的相關性并采用系統模型的方式研究模型的構成要素及其規律性。本文基于對人、車輛和環境的交通系統各要素的分析,應用認知心理學理論,嘗試對駕駛員的視覺信息獲取方式與獲取順序以及目標的判斷和車輛操作過程中的視覺信息處理機制進行了深入研究,構建了車輛駕駛者對視覺感知目標對象的交通信息處理結構模型,運用并行處理法對模型的結構特點進行了分析。
1 駕駛員視覺適應性
1.1 靜視力與動視力
靜視力是指被試者和視標在靜態狀況下的視覺感知能力,即,靜視力。靜視力主要是采用視認距離判斷靜視力的強弱。國內在檢測駕駛員的靜視力能力時通常采用E型視力表進行評定。靜視力的評定時要求檢測被試駕駛員的雙眼視力,然后對雙眼視力進行綜合評定,此種視力稱為中心視力。被試駕駛員在測試時,被試者與視力表的距離為5m,依據周圍環境照明條件,一般以照度為200±100lx (勒克斯)為測試照度,測試后按照國家相關規定,判定被試者的兩眼視力(含正常矯正視力)在0.7以上時,被試者才被允許獲得參加駕駛許可證的報考。這種檢測方法基本能反映和評定駕駛員在靜止狀態下的視覺感知能力,并以此靜視力值作為駕駛員的基本要求。
動視力是指被試者和視標在動態狀況下的視覺感知能力,即,動視力。駕駛員在駕駛過程中的視覺能力主要是動視力起作用。動視力主要是采用目標跟蹤法評定動視力。當目標出現時對動態目標的速度、位置和路徑作出反應,測量其反應時間。研究結果表明,駕駛員的動視力是隨駕駛車輛的速度變化而發生變化的,車輛速度高時反應時間長,反之,則反應時間短。通常情況下,駕駛員的動視力比靜視力低。例如,當車輛以60km/h的車速行駛時,駕駛員能識辯前方標志標識的距離約為240m;但當車速為80km/h,識辯距離明顯下降。許多研究表明,駕駛員的動視力與車輛安全事故有很大關系,因此,在進行駕駛員的視覺功能檢查時,既要檢查其靜態視覺功能也要檢查動態視覺功能。
1.2 夜間視力與環境照度視力與環境照度有關,照度增加可提高對目標的識辨能力。在照度為0.1-100m燭光的范圍內,兩者呈線性關系。通常來說,夜間環境狀況下的照度較低,易導致駕駛員的視覺判斷能力下降,表現出夜間低視力,稱為夜近視。大量的研究表明,在黃昏和照度較低的夜間狀況下,安全交通事故與低照度的夜間環境有直接關系,駕駛員在黃昏和夜間的靜視力和動視力都有所下降。
1.3 視覺選擇性注意與交通環境駕駛員依據眼睛獲得的視覺信息進行加工和解釋,從而對目標對象作出判斷是駕駛過程中的主要任務。駕駛過程中,駕駛員的視覺注意頻繁的在前方物體間轉移,根據目標的信息特征(顏色、位置和形狀等)有選擇性的對目標作出反應。選擇性注意與環境因素有很大關系,直接受環境照度,車輛速度,目標亮度及位置和形狀等因素的直接影響。
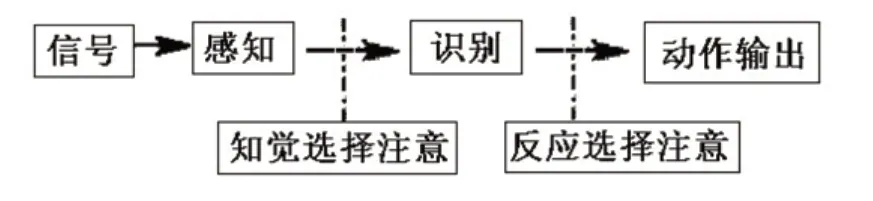
2 駕駛員的信息處理方式
認知心理學認為駕駛員的視覺信息處理方式有兩種。一種處理方式是,駕駛員的認知過程作為串行的信息處理過程,即第一階段信息處理完后就進入下一階段,即只受目標所影響的處理方式;另一種處理方式是既受目標的影響,還受駕駛經驗和先驗知識的影響,采用并行處理方式。因此,駕駛員的信息處理方式可以歸結如下:
3 交通系統信息處理結構
交通系統中的信息處理主要由該系統中的各種因素所決定,如車輛的舒適性和平順性、交通道路的路面狀況、交通環境中的標志標識的視認性、環境照度與目標亮度及駕駛員的視覺生理與視覺心理等各種因素。因此,在分析系統的信息處理結構時應該將人、車輛、道路和環境等因素納入系統中的處理對象,進行全面綜合的考慮, 對系統中各因素之間的相互聯系進行比較和評價,在對各因素比較評價的基礎上評定整個交通系統的性能。因此,交通系統的結構模型如下:
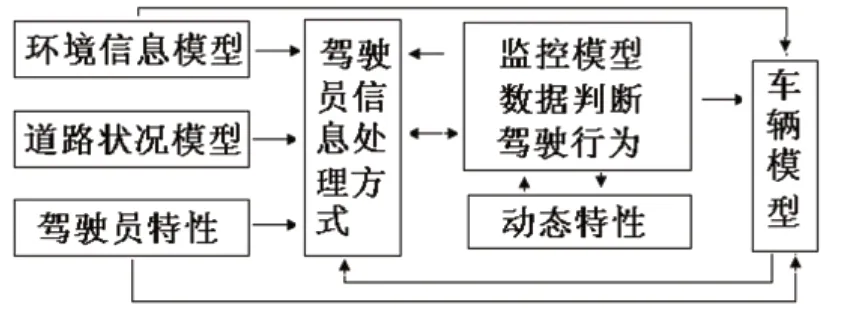
作為影響駕駛員輸入信息的有交通標志標識信息、道路狀況信息、駕駛員視覺特性信息、環境照度信息、車輛狀況信息及監控系統信息等。各種信息之間存在相互聯系和相互影響,進入駕駛員信息處理方式后,經駕駛員動態特性分析得到控制車輛行駛的決策,并通過系統協調執行系統決策。駕駛員依據駕駛實際經驗和先驗知識的調整,考慮外界環境因素的影響之后, 利用各控制模塊對車輛和視覺信息進行控制操作, 并將系統信息的決策行為反映到車輛模型之中,這樣就可改變駕駛員操縱車輛的行駛軌跡和行駛方向等。在這個階段完成之后,系統重新進行自適應的調整再對車輛行駛參數進行自適應的改變,然后又將重新將新的信息數據反饋到駕駛員的操作之中,為下一步系統的決策和執行做好準備。
4 駕駛員信息并行處理結構模型的構建
應用上述駕駛員的視覺感知、注意和記憶功能等視覺注意機制,通過對駕駛員自身生理和心理因素綜合調查以及對駕駛員視覺適應性的分析,得出在動態狀況下駕駛員在復雜的交通環境狀況下準確的進行并行處理交通信息的結構模型,即,信息并行處理結構模型。在執行駕駛任務的過程中,駕駛員自身的生理心理因素以及視認目標對象,如,交通標識等, 均被安排在行駛過程中的交通系統綜合環境之中。該模型包括的主要功能有:并行信息處理的判斷決策模塊,環境信息獲取模塊,駕駛操作執行模塊,信息輸出模塊以及駕駛員視覺適應性和視覺注意特性及自身處理交通信息的性格、偏好等特征的約束模塊。因此,駕駛員在正常條件下行駛時,交通信息加工過程進行按上述方式進行。
5 總結
(1)對駕駛員的靜視力與動視力,夜間視力與環境照度,及選擇性注意與交通環境進行了分析。基于駕駛員的信息處理方式和交通系統結構模型構建了駕駛員信息處理結構模型。
(2)駕駛員信息處理結構模型為駕駛員協同仿真模型的實現奠定了理論基礎。
[1]王彥亭,趙愛國. 我國道路交通安全發展情景分析[J]. 中國安全科學學報,2005,15(1):43-46.
[2]魏宏業,張仲義,呂永波. 促進我國道路交通安全建設策略的探討[J]. 中國安全科學學報,2003,13(6):68-71.
猜你喜歡
汽車實用技術(2022年14期)2022-07-30 06:13:42
汽車實用技術(2022年4期)2022-03-07 06:07:20
中老年保健(2021年12期)2021-08-24 03:30:40
中國傳媒大學學報(自然科學版)(2021年1期)2021-06-09 08:43:00
中國生殖健康(2020年6期)2020-02-01 06:28:50
中國生殖健康(2019年11期)2019-01-07 01:28:02
中華手工(2017年2期)2017-06-06 23:00:31
公民與法治(2016年4期)2016-05-17 04:09:26
中外會展(2014年4期)2014-11-27 07:46:46
祝您健康(1987年3期)1987-12-30 09:52:32
