遵義機場基于性能導航(PBN)飛行程序的三維呈現
2013-07-19 01:57:16朱代武徐建國劉志恒解小帆
中國科技信息 2013年21期
朱代武 徐建國 劉志恒 解小帆
中國民用航空飛行學院空中交通管理學院,廣漢618307
1. 概述
基于性能導航(Performance Based Navigation,簡稱“PBN”)技術設計的飛行軌跡,猶如在天空中鋪設了一條鐵軌,能讓飛機像火車一樣在能見度極差的條件下安全、精確地著陸,進而大大提高飛行的精確度和安全水平。然而,我國PBN飛行程序設計的研究尚不夠成熟,程序設計工作仍局限于二維階段,其可視化程度較低。因此能夠直觀、清晰地表達航線、保護區與地形、地貌之間的位置關系的三維呈現方法將會受到廣大飛行程序設計人員的青睞。
Google Earth是一款虛擬地球軟件,它把航拍照片、衛星圖片和GIS數據整合在一起,形成一個地球的三維模型,Google Earth提供免費和及時更新高精度衛星遙感影像和地形DEM數據,作為三維呈現平臺Google Earth的優勢非常明顯[1]。因此,本文選擇了Google Earth作為飛行程序設計的三維呈現平臺。由于Google Earth并不是專業的繪圖軟件,對復雜的線、面的編輯功能有限。而AutoCAD軟件具有完善的繪圖、編輯、三維建模以及強大的二次開發功能,已成為大多數飛行程序設計人員的工具。應用AutoCAD軟件的三維模塊建立跑道、航線和保護區的三維模型,然后利用AutoCAD內置的開發語言VBA在AutoCAD中實現將基于空間直角坐標系的AutoCAD圖元轉化為基于WGS84坐標系統KML文件,從而可利用Google Earth直接打開KML文件,以便結合地形、地貌進行觀察,以達到三維顯示的效果。
2. 三維呈現的實現
在飛行程序設計過程中,應用AutoCAD繪制的航線、保護區圖均可在其三維建模工作空間中打開,這時會發現AutoCAD使用的笛卡爾坐標系增加了Z軸,將圖元賦予高度參數后即可繪制出三維的航線、保護區。常用的繪圖命令有點(POINT)、直線(LINE)、構造線(XLINE)、樣條曲線(SPLINE)、三維多段線(3DPOLY)、三維面(3DFACE)等。然后應用AutoCAD中渲染功能將三維圖元美化,增強顯示效果,便于觀察。
2.1 坐標轉換的算法
目前,我國飛行程序設計中主要應用AutoCAD軟件繪制航線、保護區等,其圖中坐標系為空間直角坐標系,而Google Earth支持WGS84坐標系統。由于WGS84坐標系統為大地坐標系,因此在三維呈現的過程中需要將空間直角坐標向大地坐標的轉換。WGS-84坐標系的地球橢球參數如表1所示。

表1 WGS-84坐標系的地球橢球參數
WGS-84為地心坐標系,其大地坐標與空間直角坐標的數學關系,如圖1所示。
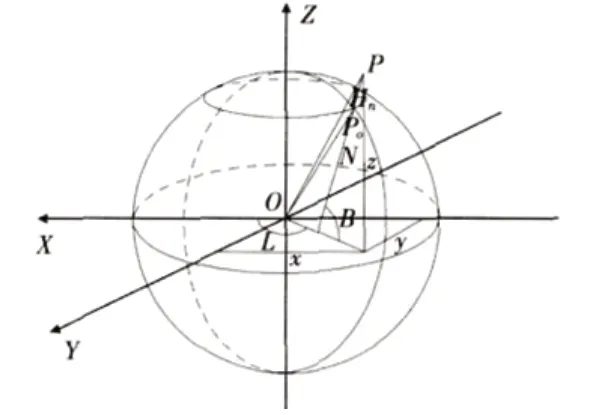
圖1 大地坐標與空間直角坐標的關系
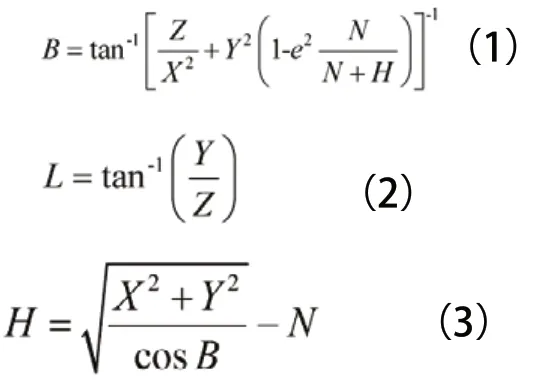
圖1中P點為測量點,P0為其在地球橢球上的投影點。由圖1測量點P點空間直角坐標P(X,Y,Z)與大地坐標P(B,L,Hn)的幾何關系通過簡單矢量運算和三角函數運算即可得出空間直角坐標(X,Y,Z)轉換到大地坐標(B,L,H)的公式:
2.2 坐標轉換的實現
作為AutoCAD內置的開發語言,VBA是一種面向對象的可視化編程工具,具有快速的開發環境,其方便、快捷的窗體創建功能可開發出與AutoCAD風格完全一致的應用程序,同時還可以彌補AutoCAD在其他方面如數據處理、數據庫建設、界面設計等等的不足。因此,本文應用VBA開發工具對AutoCAD進行二次開發。
根據公式(1)~(3)等,利用VBA編程后,生成一個.dvb的文件,即下文所說的源程序。通過AutoCAD標準菜單中的<工具>-<宏>-<加載工程>選項,加載源程序,然后選擇AutoCAD標準菜單中的<工具>-<
宏>-<宏>選項,顯示宏對話框,高亮之前加
載源程序后單擊運行按鈕執行該代碼[3]。即
在AutoCAD中運行宏代碼,界面如圖2所示。
將A u t o C A D 中圖元的基準點與用戶坐標系統(UCS)的原點重合,然后將所選圖元的基準點的緯度、經度坐標分別輸入到圖2界面中相應的位置,設置好其他參數,單擊確定按鈕運行程序。
3. APV航段保護區三維呈現
本文以遵義機場18號跑道類精密進近航段為例計算氣壓垂直導航(Baro-VNAV)程序相關參數、繪制三維VSS面與APV-OAS面,
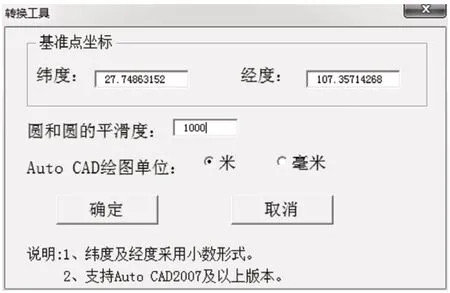
圖2 轉換工具界面
并將其在Google Earth中呈現,來分析、驗證以上方法的可行性。
3.1 目視保護面(VSS)
APV程序假定不能有障礙物穿透VSS面,在評估目視保護面時,高于入口平面不足15m的障礙物可以忽略。遵義機場的機場代碼為4,因此,VSS面在跑道入口的寬度為300m;起點在跑道入口前60m;終點在VSS面的高度達到OCH處;左右兩側按15%擴張;坡度角為程序公布的角減1.12°。遵義機場18號跑道VSS面評估如圖3。經評估,沒有障礙物穿透VSS面,可以考慮建立APV Baro-VNAV程序;若有障礙物穿透VSS面則應對障礙物進行處理,否則修正最低溫度限制等參數,重新評估障礙物是否穿透VSS面。從圖3中可以看出將二維VSS面經過三維處理后更能清晰的表達其與障礙物、跑道之間的位置關系。
3.2 障礙物評價面(OAS)
氣壓垂直導航(Baro-VNAV)是一種導航系統,它利用氣壓高度表的數據計算出條從RDH開始延伸到FAF的垂直航徑角,該垂直航徑角(VPA)標稱下滑角度為3°[4]。為飛行員提供較為精確的垂直引導(VNAV),與LNAV共同工作完成導航運行。使用Baro-VNAV的優勢在于能夠提供較為精確的下滑引導,同時能夠實施連續的下降進近,有較高的安全性。
確定了垂直航徑角(VPA)后可以建立類精密進近障礙物評價面(APV-OAS),APV-OAS的起點為最后進近點(FAP),位于垂直航徑與此前航段的最低規定高相交 的位置。FAP通常在入口前且距入口處不得超過10NM,當距離超過5NM時,FAS面需要考慮W面。APV-OAS的終點為復飛等待點(MAHF)和復飛轉彎點(MATF)中的最早者。APV-OAS面由最后進近面(FAS)、水平面、中間和最后復飛面組成,其中各航段的分界為FAF面的起點(XFAS)、Zi面的起點(Xzi)、Zf面的起點(Xzf)。FAS面、水平面、中間復飛面、最后復飛面以水平導航性能(LNAV)的主區邊界為水平邊界,相應側面的內邊界為其對應的LNAV主區邊界和對應處標高以上最低超障余度(MOC)處的LNAV副區外邊界。其中,水平面側面靠下/靠內的邊界為LNAV在入口高度的主區邊界。相應側面靠上/靠外的邊界為LNAV在FAS起點高于入口75m的副區外邊界和LNAV在至入口距離為XZi的中間復飛面起點高于入口30m的保護區邊界[5]。
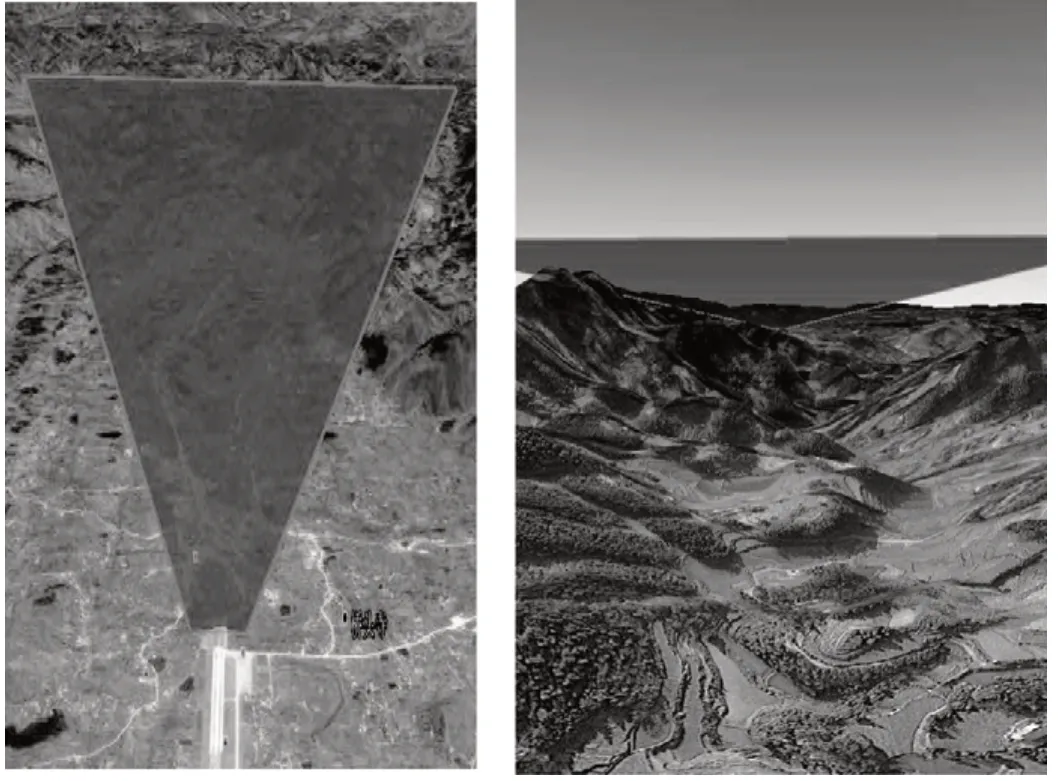
圖3 VSS面呈現效果圖
在繪制APV-OAS面前應先確定構成APV-OAS面的關鍵參數,計算如下:
FAS面的角度由公式(4)計算,

FAS面起點由公式(5)計算,
中間復飛面起點由公式(6)計算,

最后復飛面起點由公式(7)計算,

式(4)~(7)中HFAP為FAP的高;H修為最低溫度修正;MOC為最后進近的最低超障余度;RDH為基準高;ATT為沿航跡容差;d為飛行員反應時間對應的距離;X為過渡容差對應的距離;Tan Z為復飛面梯度。
將遵義機場18號跑道基礎數據代入以上(4)~(7)公式即可計算出繪制APV-OAS面的關鍵參數,然后繪制出三維APV-OAS面。Google Earth中呈現的三維APVOAS面如圖4所示。
4. 結語
本文結合了Google Earth的三維呈現的優勢與AutoCAD強大的繪圖、編輯、三維建模及二次開發功能來完成遵義機場類精密進近航段的三維呈現工作。雖然將AutoCAD中圖元轉換到Google Earth過程中有一定的誤差,Google Earth作為一款虛擬的地球軟件與真實地理環境比較也存在一些偏差,但是經與遵義機場基于性能導航飛行程序設計結果進行對比、驗證,以上誤差均為可接受范圍,從而達到三維呈現的目的。為飛行程序三維呈現提供新的思路與方法。
圖4 APV-OAS面效果圖
[1]薛亞婷. 基于 GoogleEarth 及 KML 的數字校園設計與實現方法研究[D]. 蘭州:蘭州大學,2007.
[2]仝巧珍,趙計環. 談大地坐標系和空間直角坐標系轉換的研究,山西建筑,2011(08).
[3]AutoCAD VBA從入門到精通/(美)考訂漢姆(Cottingham.M.)著:孔祥豐等譯.-北京:電子工業出版社,2001.
[4]朱代武,何光勤.目視和儀表飛行程序設計.成都:西南交通大學出版社,2004:162—164
[5]ICAO.Procedures forair navigation services aircraft operation.(DOC.8168) Fifth edition—2006:556—565
