環件徑軸向軋制中軸向爬升機制與抑制方法研究
2013-07-25 03:34:44彭亞亞宋亞東曾旭東錢東升
中國機械工程 2013年12期
彭亞亞 宋亞東 曾旭東 錢東升
1.武漢理工大學,武漢,430070
2.張家港海陸環形鍛件有限公司,蘇州,215626
0 引言
環件軋制是一種先進的無縫環形零件連續的塑性回轉成形工藝,相比于其他的環件制造技術有著節能、省材、精度高和內部組織致密的優點[1]。環件軋制分為徑向軋制和徑軸向軋制,其中,大型環件的生產都采用徑軸向軋制技術。徑軸向軋制工藝過程是由芯輥和驅動輥組成的徑向孔型和上下兩個錐輥組成的軸向孔型來實現的,芯輥直線進給,使環件壁厚減小,上錐輥向下進給,使環件高度降低,在徑軸向孔型共同作用下,環件的外徑增大。由于徑軸向軋制的環件尺寸大,所以大型環件均采用臥式軋制的方式進行軋制。
由于徑軸向軋制生產的環件尺寸較大,在重力和變形力的相互作用下,易使環件受力不均,導致軋制過程不穩定,主要表現為環件左右晃動和在徑向孔型中向上爬升,其中后者稱為爬輥現象。環件晃動會導致環件出現較大的圓度誤差,而爬輥現象輕則使環件形位精度大幅降低,重則使環件產生扭曲變形而報廢。由于軋制過程的穩定性直接影響生產出的環件是否合格,所以國內外學者在這方面做了大量的研究。Choi等[2-3]對軸向軋制過程中幾何參量的控制進行了研究,提出了自適應優化方法;張淑蓮等[4]對爬輥現象進行了初步的分析,提出了優化毛坯、調整設備和優化軋制工藝三種解決方案;Pan等[5]建立了導向輥運動的控制數學模型,為模擬軋制過程環件在水平面內穩定性控制提供了基礎;Guo等[6]和Li等[7]在ABAQUS環境下建立了熱力耦合模型,并通過液壓力實現了對環件在水平面內晃動的實時柔性抑制。上述研究都集中于解決環件左右晃動問題方面,而有關解決爬輥問題的研究報道資料甚少。但在實際生產中,爬輥現象經常發生,浪費了大量的原材料、能源和人力,因此,對于爬輥現象的深入研究和有效抑制非常必要。
基于上述現狀,本文對環件徑軸向軋制過程爬輥產生機制和抑制方法開展理論研究,為實際生產避免產生爬輥提供科學依據。
1 環件受力分析
1.1 靜態受力分析
徑軸向軋制原理如圖1所示。在實際環件徑軸向軋制中,由于環件有自身的質量,所以會在軋制設備的芯輥兩側設置一個工作臺來承載環件,相當于將環件放置在一個平面上。從其軋制原理圖可知,軋制過程中,軸向孔型中的環件會受到來自上錐輥的一個向下的力Pa的作用,同時下錐輥對環件施加反作用力,在這兩個力的共同作用下,環件局部產生塑性變形,降低了高度,而環件其他部分都未受到該作用力的影響。因此,軸向孔型中的環件部分存在變形量,該處的高度均低于其他部分,所以環件會以工作臺上靠近錐輥這部分的邊緣為支點,形成一個翻轉力矩,其受力原理如圖2所示。根據力學平衡原理,在位于徑向孔型一端的環件部分上會產生一個向上的作用力,使環件在徑向孔型中產生向上運動的趨勢,促使環件沿軸向方向爬升。

圖1 徑軸向軋制原理圖
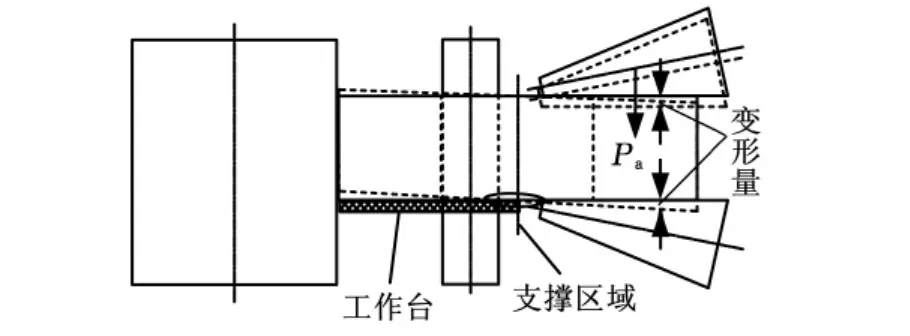
圖2 環件在靜態下的受力示意圖
1.2 旋轉狀態下的受力分析
環件的徑軸向軋制成形過程是:驅動輥旋轉,芯輥直線進給,在環件被不斷咬入到徑向孔型中的同時,上下錐輥共同旋轉,上錐輥向下進給,不斷地將環件咬入軸向孔型中。由此可知,環件是邊旋轉邊長大的,并且依靠旋轉速度和驅動輥及錐輥的轉速配合來避免環件的中心偏離驅動輥和芯輥的連心線。
環件在出軸向孔型時,由于上錐輥的進給,使環件的高度降低,并且會在環件的徑向上產生寬展,環件在被推出軸向孔型后,先推出部分的高度要大于后推出部分的高度,即圖3a所示的H3>H2>H1,表明連續的徑向寬展形成了螺旋向上運動的效果。同時,左右導向輥會根據環件中心偏離程度來對其施加作用力,確保環件在長大過程中的圓度。在徑向孔型入口側,環件的寬展部分受到導向作用力的影響,會產生一個向上的滑動摩擦力Fa,如圖3b所示,使環件產生螺旋向上運動的趨勢。而環件經過徑向孔型后,徑向寬展完全被整平,所以在徑向孔型出口側,環件和導向輥之間幾乎沒有向上的摩擦力。
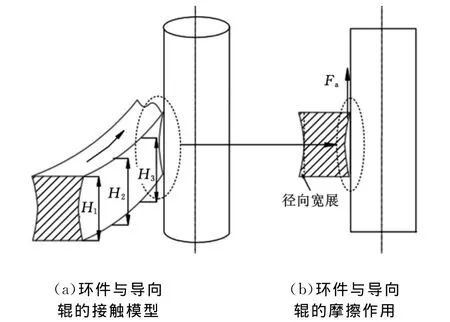
圖3 環件和導向輥作用示意圖
此外,旋轉狀態下的環件在軸向孔型中的變形區分布在兩錐輥之間平行母線的靠咬入方向一側,如圖4所示。由圖4可知,環件在出徑向孔型和咬入軸向孔型之間的部分,會被上下錐輥共同施加的作用力壓住,使環件在該側的軸向竄動受到有效的抑制,而處于軸向孔型出口側至徑向孔型入口側之間的環件未受到類似作用力的影響。
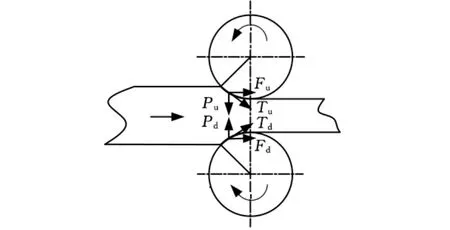
圖4 軸向孔型對環件作用示意圖
1.3 抑制方法分析
由上述環件的靜態和動態受力分析可知,在徑軸向軋制過程中,環件會受到由上錐輥向下進給產生的翻轉力、徑向寬展和導向輥之間的摩擦力,以及錐輥旋轉咬入環件時的壓力的綜合作用,該合力的作用點在徑向孔型入口側附近,方向向上。因此,將徑向孔型入口側的導向輥設計成有一定向下傾斜角度的錐輥(圖5),使導向輥產生向下的分力Py,以便有效抵消上述合力,抑制環件的爬輥現象。
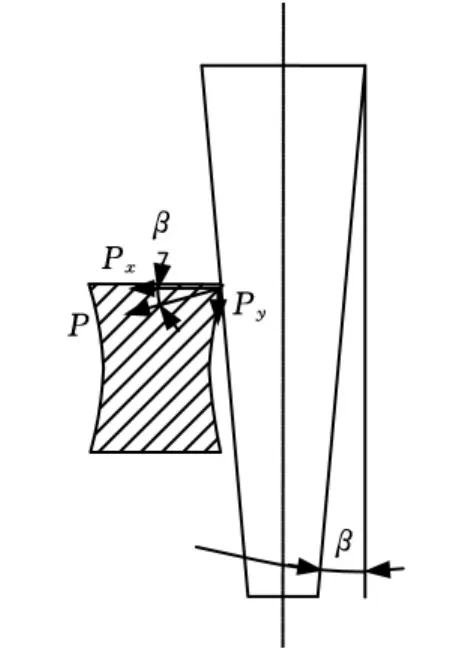
圖5 有傾角的導向輥示意圖
2 建立有限元仿真模型
2.1 模擬條件及模型
在ABAQUS/Explicit模塊下建立有限元仿真模型,如圖6所示。模型中的各項參數設置如表1所示。該模型中使用的材料是一種被廣泛用于大型環件徑軸向軋制成形的42Cr Mo鋼,其物理屬性在文獻[8]中有詳細描述,本構方程在文獻[9]中列出。
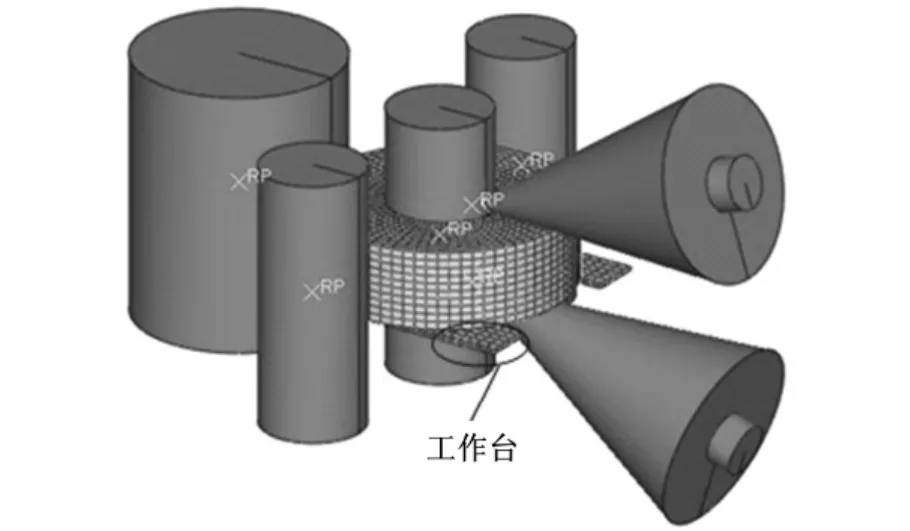
圖6 有限元仿真模型
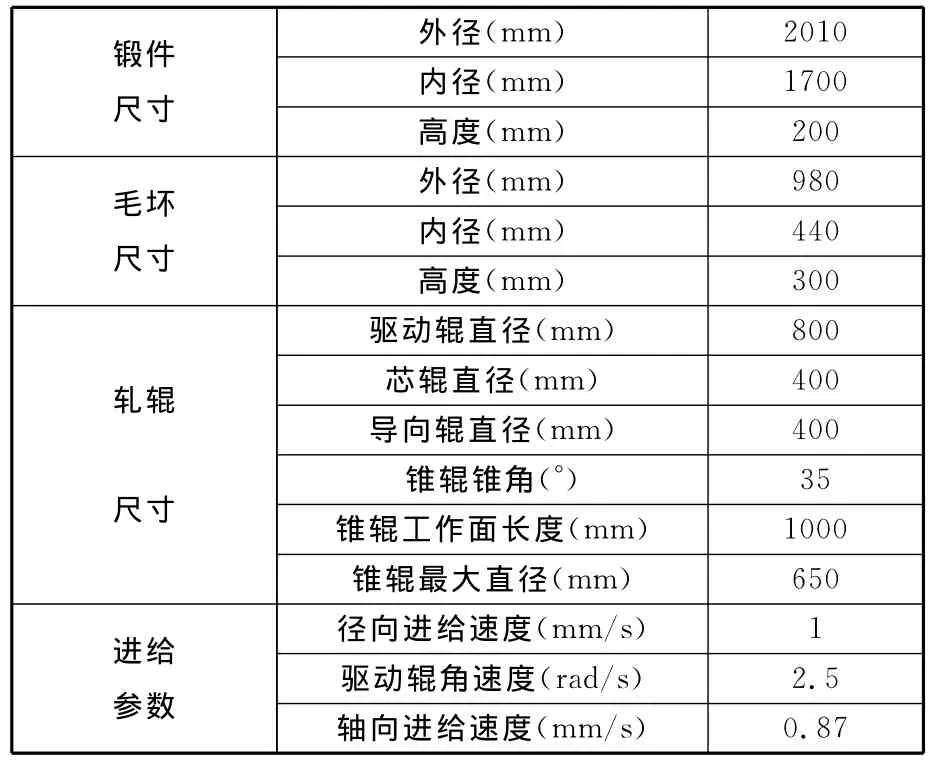
表1 模型參數設置
2.2 模型的實驗驗證
為了驗證所建立的有限元模型的可靠性,在張家港海陸環形鍛件有限公司的RAM2000型徑軸向軋環機上進行了環件徑軸向軋制仿真模型的驗證實驗,如圖7所示。實驗過程中的軋制參數與模擬過程中的軋制參數一致。

圖7 驗證實驗現場
整個軋制過程中的徑軸向軋制力F的實驗值和模擬值變化情況如圖8所示。從圖8中可以看出,實驗所獲得的數據與模擬值較符合,且變化趨勢基本一致,兩者在大部分軋制時間內的相對誤差都不超過10%,最大相對誤差分別為18.95%、18.45%,說明了該有限元仿真模型是可靠實用的。
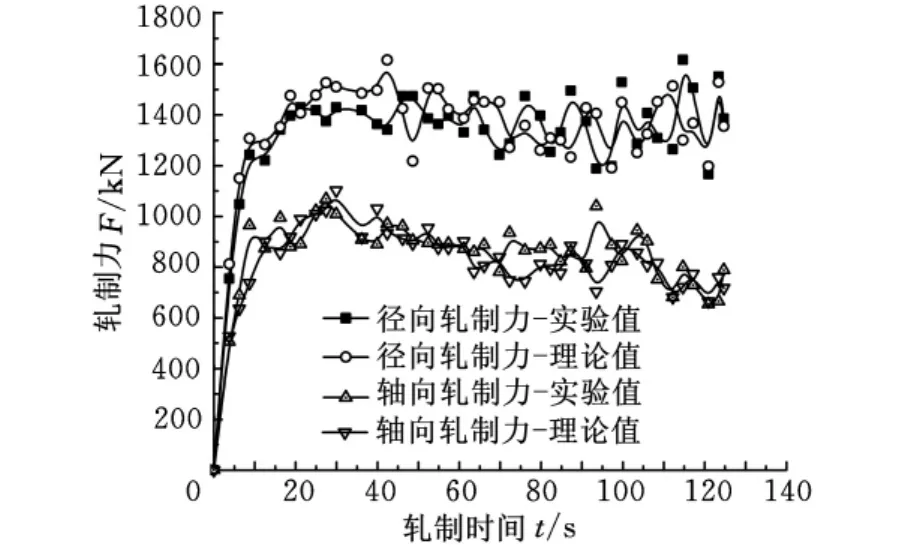
圖8 環件尺寸變化的模擬和實驗結果比較
3 模擬結果分析與討論
在環件徑軸向軋制成形過程中,若控制稍有不當,就易出現爬輥現象,這種情況在數值仿真模擬中也經常出現,如圖9所示。一旦出現爬輥,必然使環件出現扭曲,導致尺寸誤差過大或報廢。解決爬輥問題的方法是通過分析比較環件平整度、軸向穩定性和圓度的變化,獲得最優的導向輥分布方式和形狀。

圖9 模擬過程中的環件爬輥現象
3.1 不同導向輥分布方式對軋制成形的影響
為了驗證環件爬輥現象產生的力學機制,研究導向輥傾角對環件徑軸向軋制過程的影響規律,設置了一組除導向輥傾角外,其他各個參數一樣的模擬模型。具體的4種分布方式為:①徑向孔型兩側導向輥的傾角都為0°;②徑向孔型兩側導向輥的傾角都為5°;③徑向孔型進口側導向輥的傾角為5°,出口側導向輥的傾角為0°;④徑向孔型進口側導向輥的傾角為0°,出口側導向輥的傾角為5°。下面通過數值模擬來分析比較這4種導向輥分布方式對環件徑軸向軋制過程的影響,從而獲得最優的分布方式。
(1)環件平整度變化。環件的平整度p是指軋制完成后,環件上端面外徑處y坐標的最大值與最小值之差,即平整度p=max(y)-min(y),該值越小,說明環件越平整。通過對模擬結果的分析,整理得到的不同導向輥分布方式下的環件平整度數據如表2所示。由表2數據可知,導向輥組合方式①、④和②、③的環件平整度大小基本相同,但方式②、③的平整度要遠優于①、④的平整度,導向輥組合方式②、③軋制出的環件精度要明顯優于方式①、④的環件精度。

表2 不同導向輥分布方式下的環件平整度
(2)對環件軸向穩定性的影響。環件軋制過程的軸向穩定性可以用環件上端面外徑處任意一點的y值在軋制過程中的變化情況來體現。不同組合方式的導向輥對環件軸向的穩定性影響明顯,如圖10所示。在軋制過程中,環件上某點的坐標值y都是先減小后增大的,因為該點在每次經過軸向孔型時,其位置最低,出軸向孔型后,環件逐漸會被托支撐往上翹,環件直徑越大,這種往上翹的現象越明顯,其變化規律在圖10中表現得尤其明顯。在軋制前期,不同軋制方式下的環件某點的坐標值y變化情況基本一致;但在軋制的后期,尤其是環件直徑迅速長大的時候,方式①、④的y值波動非常大,說明此階段環件上下竄動比較嚴重;但方式②、③變化情況和軋制前期差別不大,表明在徑向孔徑入口側的導向輥只要有傾角就能有效抑制環件向上運動的趨勢。

圖10 不同導向輥傾角分布方式下的環件軸向穩定性曲線
(3)橢圓度變化。橢圓度e指在環件軋制過程中的環件外徑距離環件等效中心的最大值和最小值之差。在環件徑軸向軋制過程中,由于環件的尺寸較大,所以每轉的進給量也會較大,這種大進給量會使環件不同部位存在較大的壁厚差,再加上控制誤差,會導致環件在軋制過程中存在明顯的橢圓度。環件在不同傾角導向輥軋制過程中的橢圓度變化規律如圖11所示。圖11各曲線的變化顯示,環件在軋制過程中橢圓度的變化規律可以分為3個階段:第1階段為環件被咬入徑軸向孔型,此階段環件在變形力的作用下,開始產生壁厚差,整個階段,環件的橢圓度迅速增大;第2階段為環件穩定軋制階段,此階段環件的橢圓度持續增大,但是比較緩慢,而且有呈階梯式增長的現象,隨著橢圓度的增大,導向輥受力增大,促使環件橢圓度減小,從而有效阻止環件橢圓度增大的趨勢,但隨著環件外徑的增大以及外徑增速的提升,每轉的進給量會逐步增大,因此,橢圓度在被有效抑制后又會緩慢地增大;第3階段為整圓階段,此階段環件徑軸向進給速度逐步減小至0,所以環件的橢圓度會迅速減小,最終環件的橢圓度會減小至2~4mm之間。
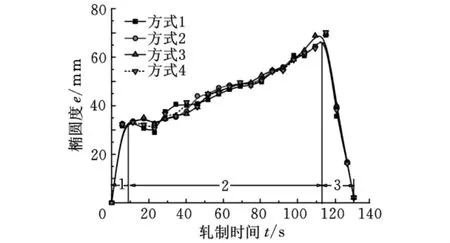
圖11 不同傾角導向輥下的環件軋制橢圓度變化規律
比較圖11各曲線可以發現,不同傾斜角度的導向輥分布方式對環件橢圓度的變化影響不大,方式1、4下的環件軋制橢圓度變化相比方式2、3的變化波動稍大。
綜上所述,在環件徑軸向軋制中,不同分布方式的導向輥,其對軋制過程具有不同的影響,尤其是對環件軸向上的穩定性和精度有較大的影響,驗證了前述環件在軸向受力情況的理論分析。
3.2 不同導向輥傾角對軋制過程的影響
徑向孔型入口側的導向輥傾角對環件在軸向上的穩定性和精度控制效果非常明顯。為了進一步得到最優的導向輥傾角大小,設置一組其他參數相同,徑向入口側導向輥傾角分別為2.5°、3.5°、5°、6.5°、7.5°的模擬模型。通過模擬分析,比較不同傾角對環件徑軸向軋制過程的影響,從而獲得最優的導向輥傾角大小范圍。
(1)環件平整度變化。圖12所示為不同導向輥傾角下的環件平整度曲線。從圖中可以看出,當傾角為3.5°時,環件的平整度最好;當傾角小于3.5°時,導向輥對環件的作用力在垂直方向上的分力不足以與環件上向上的合力相抵消,當傾角大于3.5°時,因上述分力過大,錐輥在軸向孔型入口側的壓力會以工作臺邊緣為支撐點,使環件產生輕微的彎曲形變而降低平整度,且隨著傾角的增大,這一效果會更明顯。
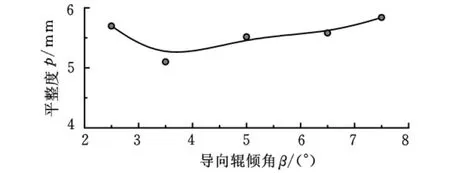
圖12 不同導向輥傾角下的環件平整度曲線
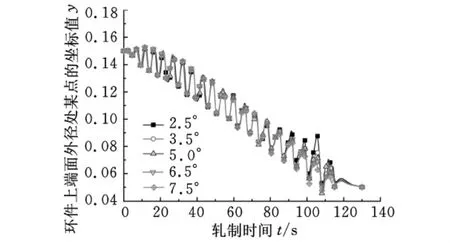
圖13 不同導向輥傾角下的環件軸向穩定性
(2)對環件軸向穩定性的影響。從圖13所示的各曲線變化情況可以看出,導向輥傾角對環件軋制過程中的軸向穩定性影響作用較小,但是當這個傾角在2.5°時,在軋制不同導向輥傾角下的環件橢圓度變化曲線后期,會由于環件外徑的增大以及增大的速度過快而出現比較明顯的波動,這表明傾角在2.5°時導向輥產生的垂直向下分力不足以將環件上向上的合力完全抵消。
(3)橢圓度變化。圖14所示為不同導向輥傾角下環件橢圓度變化曲線,從圖中可以看出不同的導向輥傾角,對環件的橢圓度變化影響不大,也從另一個方面驗證了導向輥的傾角有利于軋制過程的穩定性控制。
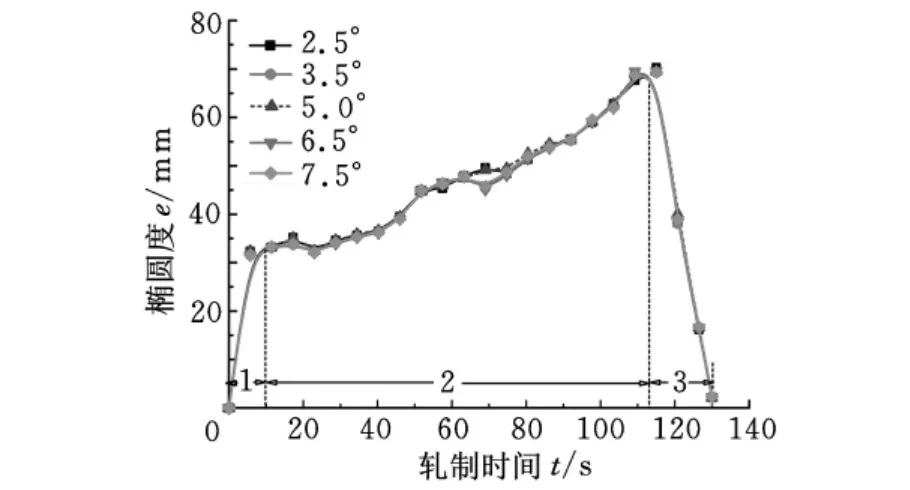
圖14 不同導向輥傾角下的環件橢圓度變化
4 實驗驗證
如前所述,在張家港海陸環形鍛件有限公司進行環件軋制時,在其軋環機入口側向輥固定支架上增加了一個墊塊,使原本垂直水平面的導向輥工作面向內側傾斜了3.5°左右。圖15為實驗過程現場。圖16為軋制實驗獲得的環件。實驗過程中,徑向孔型中的爬輥趨勢得到了明顯的抑制,軸向振動減小,整個過程穩定可控。表3數據顯示,當外徑處的橢圓度控制在環件外徑的0.1%左右且平整度控制在環件高度的1%左右時,軋機能軋制出形位精度非常高的環件。實驗結果再次驗證了本文理論分析和模擬結果的正確性。
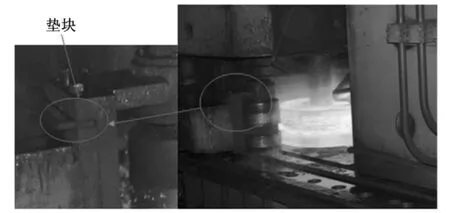
圖15 軋制實驗現場
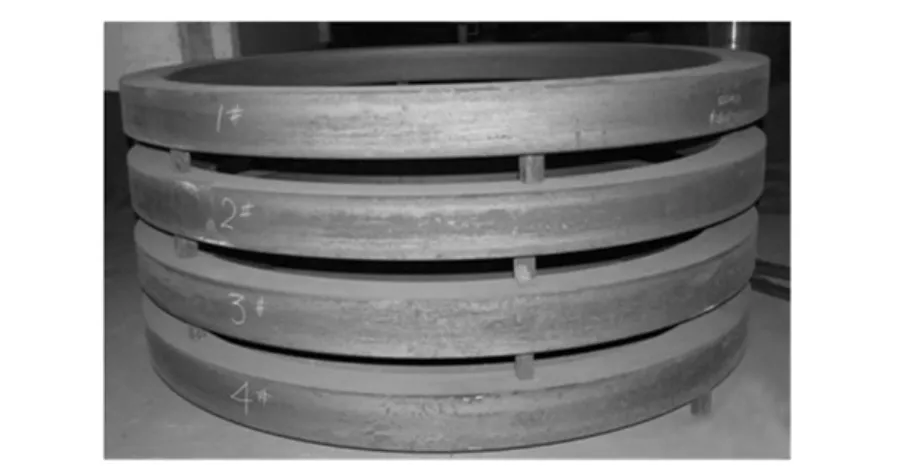
圖16 軋制實驗產品

表3 實驗過程中環件的基本參數 mm
[1]華林,黃興高,朱春東.環件軋制理論和技術[M].北京:機械工業出版社,2001.
[2]Choi H D,Cho H S.An Adaptive Control Approach to the Ring Geometry Control for Radial-axial Ring Rolling Processes[J].Journal Mechanics Engineering Science,1989,203:243-254.
[3]Choi H D,Cho H S,Lee J S.On the Dynamic Characteristics of Radial-axial Ring Rolling Processes[J].Journal of Engineering for Industry,1992,114(2):188-195.
[4]張淑蓮,何養民,楊大祥.大型鋁合金環形件軋制過程中扭曲爬輥問題研究[J].有色金屬加工,2007,36(2):43-44.
Zhang Shulian,He Yangmin,Yang Daxiang.Study on the Creeping and Distortion of Large-size Aluminium Alloy Ring Rolling Process[J].Nonferrous Metals Processing,2007,36(2):43-44.
[5]Pan L B,Hua L,Lan J.3-D FE Simulation and Analysis on Radial-axial Large Ring Rolling[J].Materials Science Forum,2007(561/565):1903-1906.
[6]Guo L G,Yang H.Key Technologies for 3D-FE Modeling of Radial-axial Ring Rolling Process[J].Materials Science Forum,2008(575/578):367-372.
[7]Li L Y,Yang H,Guo L G,et al.A Control Method of Guide Rolls in 3D-FE Simulation of Ring Rolling[J].Journal of Materials Processing Technology,2008,205:99-110.
[8]潘家禎.壓力容器材料實用手冊[M].北京:化學工業出版社,2000.
[9]Lin Y C,Chen M S,Zhong J.Constitutive Modeling for Elevated Temperature Flow Behavior of 42Cr Mo Steel[J].Computational Materials Science,2008,42(3):470-477.