基于多智能體的船舶區(qū)域配電網(wǎng)短路故障重構(gòu)
2013-08-10 02:57:00張威施偉鋒溫彤
船電技術(shù) 2013年9期
張威,施偉鋒,溫彤
(上海海事大學(xué),上海201306)
0 引言
多智能體(MA, Multi-Agent)作為分布式人工智能的重要組成部分,不僅具有分布性、智能性及理性特點,而且較傳統(tǒng)的人工智能技術(shù)有更強(qiáng)的靈活性和適用性。隨著多智能體理論及其技術(shù)應(yīng)用的發(fā)展,越來越多地被用來解決工程實際問題,出現(xiàn)了各種各樣的基于智能體技術(shù)的應(yīng)用系統(tǒng):電網(wǎng)運(yùn)行決策系統(tǒng)、配電網(wǎng)快速故障恢復(fù)決策系統(tǒng)[1]、智能交通系統(tǒng)[2]等。
船舶電力系統(tǒng)故障重構(gòu)是解決船舶電力系統(tǒng)故障時,切除故障部分,保證非故障部分及重要負(fù)荷可靠供電,確保整個船舶電力系統(tǒng)安全、可靠運(yùn)行的重要方法之一。本文,首先介紹了多智能體方法;然后,結(jié)合所采用的船舶區(qū)域配電系統(tǒng)電網(wǎng)拓?fù)浣Y(jié)構(gòu),探索復(fù)合型多智能體技術(shù)在船舶區(qū)域配電網(wǎng)故障重構(gòu)中的應(yīng)用;最后,通過對船舶區(qū)域配電網(wǎng)在有、無多智能體作用下的故障重構(gòu)的對比仿真與分析,說明復(fù)合型多智能體能夠有效實現(xiàn)船舶區(qū)域配電網(wǎng)短路故障重構(gòu)。
1 多智能體方法
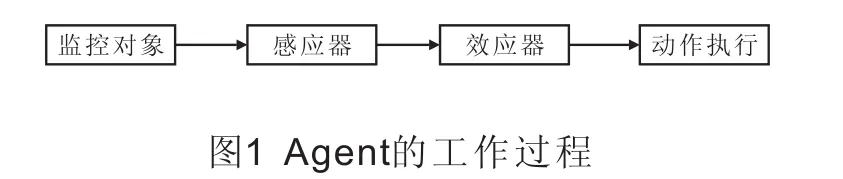
智能體可以看成一個智能單元[1],通過傳感器感知環(huán)境信息,通過效應(yīng)器作用于環(huán)境。其工作過程,如圖1所示。
智能體的體系結(jié)構(gòu)主要包括三種[1,3]:認(rèn)知結(jié)構(gòu)、反應(yīng)結(jié)構(gòu)和復(fù)合結(jié)構(gòu)。這里采用的復(fù)合結(jié)構(gòu)多智能體進(jìn)行船舶電力系統(tǒng)重構(gòu)研究,它同時包含認(rèn)知型和反應(yīng)型智能體。其中,認(rèn)知型智能體是利用RBF神經(jīng)網(wǎng)絡(luò)具有較強(qiáng)學(xué)習(xí)能力,且能夠以任意精度逼近任一連續(xù)函數(shù)的功能,進(jìn)行認(rèn)知學(xué)習(xí);反應(yīng)型智能體通過對認(rèn)知型智能體產(chǎn)生的數(shù)據(jù)處進(jìn)行理分析后生成相應(yīng)的控制信號,控制斷路器動作進(jìn)而實現(xiàn)系統(tǒng)重構(gòu)。
基于船舶電力系統(tǒng)復(fù)雜性的特點,研究采用的是復(fù)合型多智能體。這種結(jié)構(gòu)綜合了網(wǎng)狀結(jié)構(gòu)、發(fā)散結(jié)構(gòu)的優(yōu)點,各智能體既可通過網(wǎng)狀結(jié)構(gòu)相互聯(lián)系,又可通過發(fā)散結(jié)構(gòu)實現(xiàn)各智能體間通信。
2 船舶區(qū)域配電系統(tǒng)重構(gòu)智能體分布
2.1 船舶區(qū)域配電系統(tǒng)拓?fù)浣Y(jié)構(gòu)
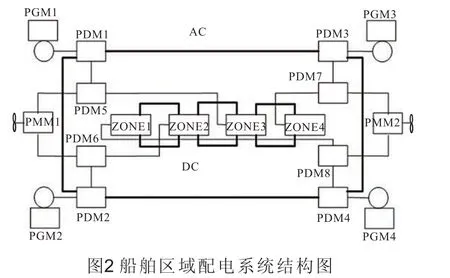
船舶電力系統(tǒng)是一個非線性動態(tài)系統(tǒng),電力推進(jìn)船舶對供電系統(tǒng)有著較高的可靠性要求,對于區(qū)域配電系統(tǒng)更是如此[4,5]。典型的船舶電力系統(tǒng)區(qū)域配電結(jié)構(gòu)[6],如圖 2所示。船舶電力系統(tǒng)采用區(qū)域配電結(jié)構(gòu)使得整個系統(tǒng)具有更高的集成性與分布性,便于船舶電力系統(tǒng)重構(gòu)控制實現(xiàn)。
在該區(qū)域配電方式中,發(fā)電單元與配電單元采用縱向連接的方式,并與各配電單元串接在一起形成一個完整的環(huán)形網(wǎng)絡(luò),繼而向各區(qū)域用電單元供電。某一配電區(qū)域發(fā)生的局部故障不致影響到整個船舶電力系統(tǒng),只需要合理的供電配置就可以保證重要設(shè)備具有較高的供電可靠性。
2.2 船舶區(qū)域配電系統(tǒng)多智能體配置
基于多智能體的船舶區(qū)域配電網(wǎng)故障重構(gòu)中的智能體按功能又可分為兩大類:執(zhí)行智能體和決策智能體,通過各執(zhí)行智能體對整個電力系統(tǒng)中各開關(guān)元件狀態(tài)信號、支路電流、節(jié)點電壓的數(shù)據(jù)采集,并將采集的數(shù)據(jù)發(fā)送給決策智能體,由決策智能體產(chǎn)生重構(gòu)策略,實現(xiàn)系統(tǒng)重構(gòu)。
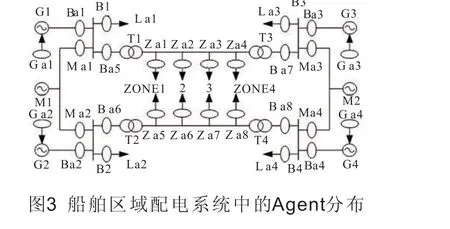
根據(jù)船舶電力系統(tǒng)中各單元的負(fù)荷類型, 多智能體的區(qū)域劃分如圖3所示。圖中,GA、MA、BA、ZA、LA分別代表發(fā)電機(jī)單元、推進(jìn)電動機(jī)單元、母線單元、區(qū)域負(fù)荷單元及由母線直接供電負(fù)荷單元智能體。
每一種類型的智能體都包含執(zhí)行智能體與決策智能體兩個組成部分,且各執(zhí)行智能體均受同類型的決策智能體控制。例如:發(fā)電機(jī)決策智能體控制;推進(jìn)電機(jī)決策智能體控制;母線決策智能體控制;區(qū)域配電決策智能體控制;負(fù)荷決策智能體控制。決策智能體與其所控制的執(zhí)行智能體間的通信是雙向的,如圖 4(a)所示;各決策智能體間也有著通信連接,且受全局決策智能體的控制,如圖4(b)所示。
3 基于多智能體的船舶區(qū)域配電網(wǎng)短路故障重構(gòu)與分析
3.1 多智能體的重構(gòu)原理
多智能體(MA)技術(shù)在船舶電力系統(tǒng)重構(gòu)中的實現(xiàn),不僅通過各智能體自主完成任務(wù),而且通過通信使各智能體相互協(xié)作完成。各智能體之間功能有著清晰的劃分,且能較好的相互協(xié)作解決重構(gòu)問題,使得整個系統(tǒng)不僅具有一定的自主性,還擁有良好的交互性。船舶電力系統(tǒng)智能體重構(gòu)是通過對船舶電力系統(tǒng)故障運(yùn)行數(shù)據(jù)信息(電流、電壓)的提取,在多智能體的作用下進(jìn)行數(shù)據(jù)分析,診斷出故障位置、類型及范圍,根據(jù)重構(gòu)約束條件,生成相應(yīng)的系統(tǒng)重構(gòu)策略實現(xiàn)系統(tǒng)重構(gòu)。
船舶電力系統(tǒng)重構(gòu)通常應(yīng)該滿足以下約束條件:1) 優(yōu)先級約束:按照負(fù)荷優(yōu)先級別高低恢復(fù)供電;2) 功率平衡約束:必須滿足發(fā)電和負(fù)荷功率的平衡,不能引起發(fā)電機(jī)組過載;3)電壓、電流約束。
本文研究的船舶區(qū)域配電網(wǎng)故障重構(gòu)是考慮負(fù)荷供電優(yōu)先級的船舶電力系統(tǒng)重構(gòu),首先根據(jù)各用電設(shè)備在船舶電力系統(tǒng)中的重要性,設(shè)置不同的供電優(yōu)先級。當(dāng)供電單元故障不能為整個系統(tǒng)提供足夠的能量時,優(yōu)先切除供電優(yōu)先級低的負(fù)荷單元,確保更高一級的用電單元安全供電;當(dāng)供電單元恢復(fù)系統(tǒng)供電時,按負(fù)荷供電優(yōu)先級由高到低依次恢復(fù)各用電單元的供電。最終,實現(xiàn)船舶電力系統(tǒng)在保證安全可靠供電的基礎(chǔ)上具有一定的自愈能力。
3.2 故障重構(gòu)邏輯分析
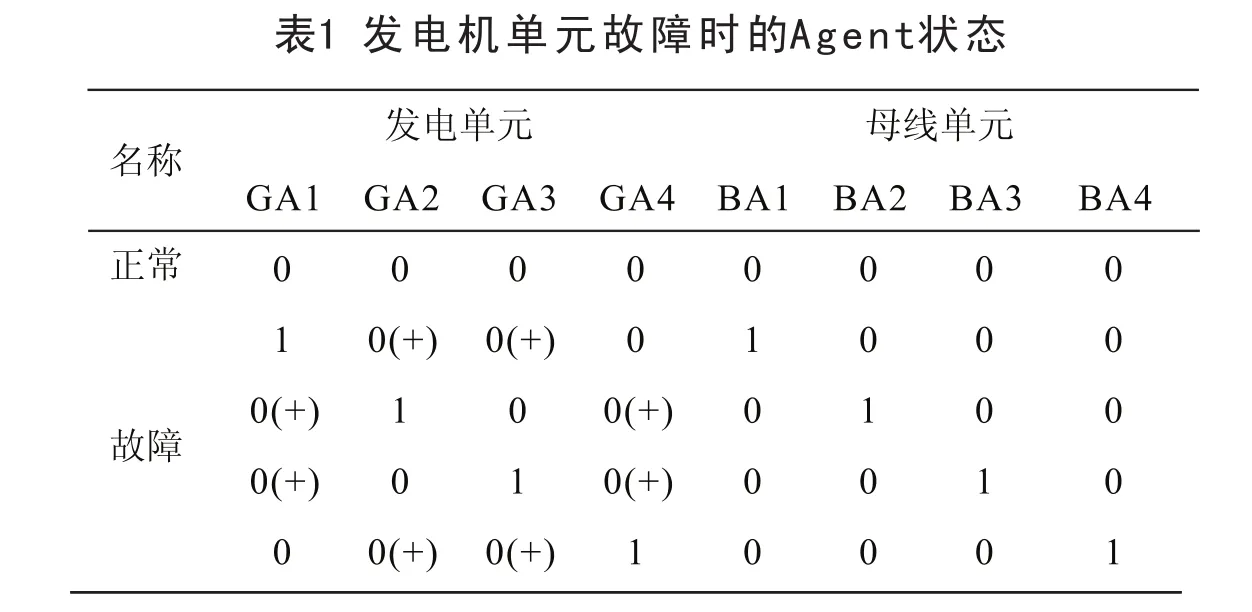
在各發(fā)電機(jī)組工作在非滿載狀態(tài)下,當(dāng)某一發(fā)電機(jī)組如組1功率輸出側(cè)發(fā)生故障,必須切除對系統(tǒng)供電時,由如圖4所示的交互關(guān)系可知,GA1在多智能體的作用下,首先切除發(fā)電機(jī)組1對整個系統(tǒng)的供電;然后,在通過 GA1與鄰近GA2、GA4的直接通信提高它們對系統(tǒng)的供電,同時,將故障信號傳輸給發(fā)電機(jī)決策智能體,由發(fā)電機(jī)決策智能體控制其余發(fā)電機(jī)組的功率輸出。當(dāng)非故障發(fā)電機(jī)組的供電能力不能滿足全系統(tǒng)的需求時,發(fā)電機(jī)決策智能體向其他各決策智能體發(fā)出通信請求,通過各決策智能體的交互、協(xié)作,生成相應(yīng)的重構(gòu)策略進(jìn)行相應(yīng)的負(fù)荷卸載切換,為船舶的安全運(yùn)行提供可靠供電。
表1為發(fā)電機(jī)組故障時,相應(yīng)智能體的狀態(tài)。表中,0:正常狀態(tài)(“+”表示功率輸出增大),1:動作(故障)信號,未列出的智能體維持原狀態(tài)。
3.3 船舶區(qū)域配電系統(tǒng)故障重構(gòu)仿真
根據(jù)圖2所示的船舶區(qū)域配電系統(tǒng)拓?fù)浣Y(jié)構(gòu)及相應(yīng)的智能體分布,如圖 3,在 MATLAB/SimPowerSystem環(huán)境下搭建系統(tǒng)仿真模型。
研究復(fù)合型多智能體在發(fā)電機(jī)組功率輸出側(cè)發(fā)生三相接地短路時,隔離故障;故障切除后,發(fā)電機(jī)對系統(tǒng)恢復(fù)供電的影響。該仿真系統(tǒng)由發(fā)電機(jī)智能體、負(fù)荷智能體、推進(jìn)電機(jī)智能體及母線智能體組成,供電母線模擬故障發(fā)生前的發(fā)電機(jī)組單元,同步發(fā)電機(jī)模型模擬非故障發(fā)電機(jī)組單元,異步電動機(jī)模擬推進(jìn)電動機(jī)單元。

仿真研究采用的復(fù)合型多智能體,首先,由基于 RBF神經(jīng)網(wǎng)絡(luò)的認(rèn)知型智能體通過對供電母線側(cè)電流數(shù)據(jù)的采集分析,生成狀態(tài)信號0、1(1表示故障,0表示正常),同時將狀態(tài)信息上傳給決策智能體;其次,通過反應(yīng)型智能體執(zhí)行決策智能體發(fā)出的控制信號,控制斷路器動作;最后,對仿真結(jié)果進(jìn)行分析。認(rèn)知型智能體所采用的RBF神經(jīng)網(wǎng)絡(luò)是應(yīng)用MATLAB神經(jīng)網(wǎng)絡(luò)工具學(xué)習(xí)訓(xùn)練后得到的,它的輸入是所監(jiān)測的支路電流值,輸出是該支路的狀態(tài)信息。其中,輸入層到隱含層權(quán)值:[101.7540,107.0394]T,隱含層閾值為[26.7917, 28.3097]T,隱含層到輸出層權(quán)值:[-15.8562,15.8478],輸出層閾值:-1.0114。
故障類型:三相接地短路,故障時間為1.0 s至 1.4 s。
仿真結(jié)果表明,當(dāng)母線側(cè)發(fā)生三相接地短路時,母線側(cè)的短路電流達(dá)32 kA,瞬時沖擊電流達(dá)55kA,遠(yuǎn)遠(yuǎn)超過母線穩(wěn)態(tài)運(yùn)行情況下的75 A電流,必須予以切除。
故障發(fā)生前,母線與同步發(fā)電機(jī)聯(lián)合向異步電動機(jī)供電;故障發(fā)生時,在多智能體的作用下,故障部分的供電母線被切除,異步電動機(jī)由同步發(fā)電機(jī)單獨(dú)供電。
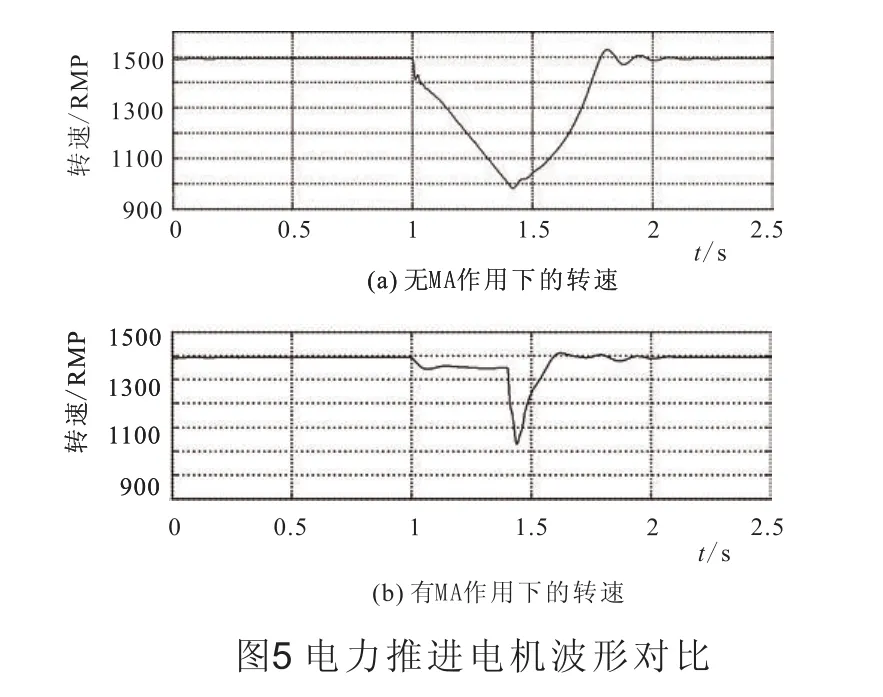
對比分析故障前后,在有無多智能體作用下異步電動機(jī)轉(zhuǎn)速變化,可知在沒有多智能體的情況下,短路發(fā)生時電力推進(jìn)電機(jī)轉(zhuǎn)速急劇下降,在故障發(fā)生 0.4 s時下降至 1000 rpm,降幅達(dá)33.3%;采用多智能體后,電力推進(jìn)電機(jī)轉(zhuǎn)速維持在1450 rpm,降幅為3.33%。說明系統(tǒng)故障時在多智能體控制下,能夠有效切除故障,保證非故障部分的可靠供電。同時,在 1.4 s時圖 5(b)轉(zhuǎn)速下降幅度小于圖5(a),然后回升至正常轉(zhuǎn)速。
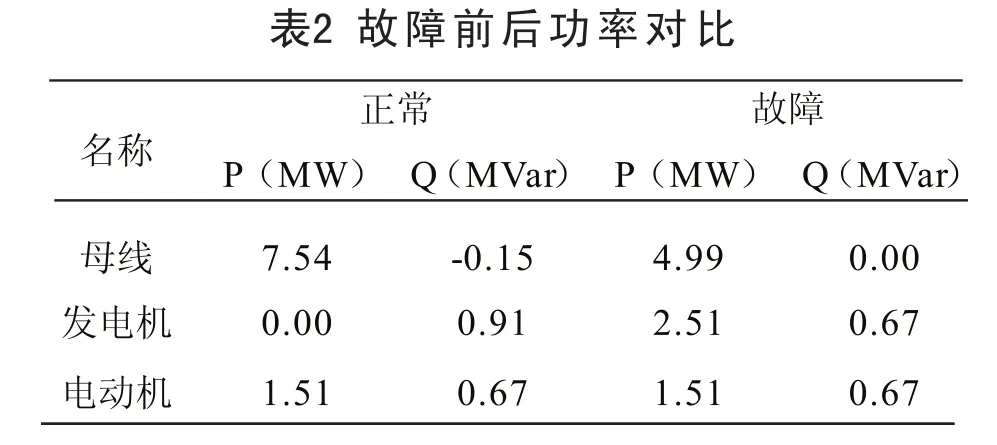
通過對仿真系統(tǒng)在有、無多智能體作用下相應(yīng)的潮流分析,可知當(dāng)系統(tǒng)正常運(yùn)行時,異步電動機(jī)的有功功率由供電母線提供(母線表現(xiàn)為容性),發(fā)電機(jī)僅為系統(tǒng)提供無功功率,同時對母線進(jìn)行無功補(bǔ)償;故障時,供電母線被切除,電動機(jī)完全由發(fā)電機(jī)供電。
4 結(jié)論
電力推進(jìn)船舶電力系統(tǒng)是以柴油發(fā)電機(jī)與大功率推進(jìn)電機(jī)作為船舶動力裝置的系統(tǒng),取代內(nèi)燃機(jī)作為船舶主動力,為提高供電可靠性越來越多地采用區(qū)域配電方式。本文通過對多智能體(MA)工作原理的介紹,結(jié)合船舶區(qū)域配電系統(tǒng)的拓?fù)浣Y(jié)構(gòu)及其智能體分布,將復(fù)合型多智能體方法應(yīng)用于船舶區(qū)域配電網(wǎng)故障重構(gòu)中。在MATLAB/ SimPowerSystem環(huán)境下,對比分析船舶電力系統(tǒng)某一發(fā)電機(jī)組功率輸出側(cè)發(fā)生三相接地短路故障時,在有、無復(fù)合型多智能體作用下重構(gòu)前后的潮流及電機(jī)轉(zhuǎn)速仿真波形,說明復(fù)合型多智能體能夠有效實現(xiàn)短路故障重構(gòu),對保證船舶電力系統(tǒng)安全可靠運(yùn)行起到了積極的作用。
:
[1]盛萬興,楊旭升. 多 Agent系統(tǒng)及其在電力系統(tǒng)中的應(yīng)用[M]. 北京:中國電力出版社,2007.
[2]李英. 多 Agent系統(tǒng)及其在預(yù)測與智能交通系統(tǒng)中的應(yīng)用[M]. 上海:華東理工大學(xué)出版社,2004.
[3]艾芊. 現(xiàn)代電力系統(tǒng)辨識人工智能方法[M]. 上海:上海交通大學(xué)出版社,2012.
[4]Wang, J., Kadanak, P., Sumner, M., Thomas, D.W.P.,Geertsma, R.D. Active fault protection for an AC zonal marine power system architecture[J]. Industry Applications Society Annual Meeting, IEEE, 2008.
[5]Chalfant, J.S., Chryssostomidis, C. Analysis of various all-electric-ship electrical distribution system topologies[J]. Electric ship Technologies Symposium(ESTS), IEEE, 2011.
[6]施偉鋒,許曉彥. 船舶電力系統(tǒng)建模與控制[M]. 北京:電子工業(yè)出版社,2012.
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40
船舶(2021年4期)2021-09-07 17:32:22
小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(yǎng)(2015年6期)2015-04-17 03:31:50