嵌入式視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤技術(shù)研究
2013-08-20 04:58:48金立左
電子設(shè)計(jì)工程 2013年21期
毛 磊,金立左
(東南大學(xué) 自動(dòng)化學(xué)院,江蘇 南京 210096)
PPM(Posterior Probability Measure)[1]是一種圖像匹配相似性判別指標(biāo),它利用搜索區(qū)域的統(tǒng)計(jì)特征來(lái)抑制背景特征對(duì)相似度函數(shù)的貢獻(xiàn),相比傳統(tǒng)巴氏Mean Shift[2]跟蹤算法,基于PPM指標(biāo)的PPM跟蹤算法有較銳的單峰值態(tài)勢(shì),能有效減小匹配偏差并得到搜索最優(yōu)解[1]。但此法對(duì)存在明顯尺度變化的目標(biāo)進(jìn)行跟蹤時(shí),由于跟蹤窗口尺寸固定,容易出現(xiàn)目標(biāo)跟偏甚至跟丟的現(xiàn)象。針對(duì)上述問(wèn)題,我們?cè)谏钊胙芯縋PM跟蹤算法基礎(chǔ)上,提出了一種能表征目標(biāo)尺寸變化的PPM縮放指標(biāo),對(duì)傳統(tǒng)PPM跟蹤算法進(jìn)行了改進(jìn),改善了跟蹤效果。
嵌入式視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤系統(tǒng)以其體積小巧、性能可靠、性?xún)r(jià)比高等突出優(yōu)點(diǎn),已在視頻監(jiān)控、智能交通、成像末制導(dǎo)等領(lǐng)域獲得廣泛應(yīng)用。以高速DSP為核心的高速圖像處理卡和實(shí)時(shí)視頻采集卡是視覺(jué)目標(biāo)跟蹤研究的重要硬件平臺(tái)。目前,國(guó)內(nèi)外在該領(lǐng)域已開(kāi)展了廣泛研究,并已成為機(jī)器視覺(jué)應(yīng)用的熱門(mén)方向之一。本文研究并實(shí)現(xiàn)了一套基于高速DSP的視覺(jué)目標(biāo)跟蹤系統(tǒng),并將改進(jìn)后的PPM跟蹤算法移植到該嵌入式系統(tǒng)中,取得了較好的實(shí)時(shí)運(yùn)動(dòng)目標(biāo)跟蹤效果。
1 視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤算法流程
本文的視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤算法包括傳統(tǒng)PPM跟蹤算法、基于PPM縮放指標(biāo)的跟蹤窗尺寸自適應(yīng)算法。算法流程如圖1所示。
2 跟蹤窗口自適應(yīng)的PPM跟蹤算法設(shè)計(jì)
2.1 PPM原理簡(jiǎn)介
以φ(p,q)表示候選目標(biāo)區(qū)域與目標(biāo)模板之間的相似度,其中p和q分別表示候選區(qū)域和目標(biāo)模板的特征向量,以s表示搜索區(qū)域的特征向量,若采用直方圖作為圖像的統(tǒng)計(jì)特征,則最大后驗(yàn)概率指標(biāo)的形式為:

式中:m是目標(biāo)模板像素?cái)?shù);mu是特征維數(shù);qu、pu和su分別是模板、候選區(qū)域和搜索區(qū)域的第u維的值。
要統(tǒng)計(jì)第u個(gè)特征的值,即puqu/su,若以像素的形式來(lái)求解,就是對(duì)候選區(qū)域中所有特征為u的像素對(duì)應(yīng)的qu/su求和。如果有n個(gè)這樣的像素,則有:
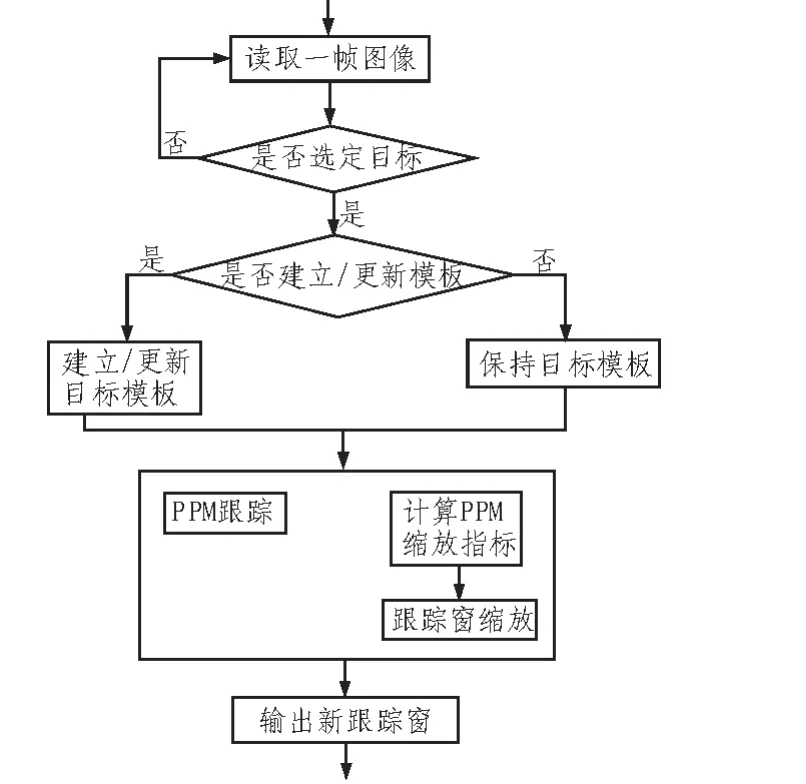
圖1 視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤算法流程圖Fig.1 Flow chart of visual moving target tracking algorithm

顯然,n正是候選區(qū)域第u個(gè)特征的統(tǒng)計(jì)值,也就是說(shuō)pu=n。對(duì)每一維特征,其對(duì)應(yīng)的puqu/su值都可以通過(guò)像素對(duì)應(yīng)的值求和得到,則式(1)可以改寫(xiě)為:

式中:m是候選區(qū)域的像素?cái)?shù)。又設(shè)像素j對(duì)應(yīng)的顏色特征是第 u維的,qu(j)和su(j)則表示目標(biāo)模板和搜索區(qū)域直方圖向量的第u維的值。通過(guò)每個(gè)像素的相似度貢獻(xiàn)值計(jì)算相似度。將每個(gè)像素對(duì)其候選區(qū)域的相似度的貢獻(xiàn)作為密度,提出PPM圖像跟蹤算法。跟蹤算法的詳細(xì)原理介紹請(qǐng)參看文獻(xiàn)[1]。
2.2 跟蹤窗口尺寸自適應(yīng)的PPM算法
由式(3)啟發(fā),我們定義能表征目標(biāo)大小變化的PPM縮放指標(biāo)δ如下:

式中:m是目標(biāo)區(qū)域的像素?cái)?shù)。設(shè)像素i對(duì)應(yīng)的顏色特征是第 u 維的,Cu(i)和 Tu(i)分別表示當(dāng)前目標(biāo)區(qū)域和模板目標(biāo)區(qū)域直方圖向量的第u維的值。分解式(4)得:

式中:m1 是目標(biāo)窗口區(qū)域中目標(biāo)的像素?cái)?shù),C1u(i)和 T1u(i)分別表示目標(biāo)窗口區(qū)域中當(dāng)前目標(biāo)和模板目標(biāo)直方圖向量的第 u 維值,C0u(i)和 T0u(i)分別表示目標(biāo)窗口區(qū)域中當(dāng)前背景和模板中背景直方圖向量的第u維值。式(5)是線(xiàn)性的相加,因此我們可假設(shè):當(dāng)前目標(biāo)窗中歸類(lèi)為目標(biāo)的像素個(gè)數(shù)為x(則歸類(lèi)為背景的像素個(gè)數(shù)為m-x);目標(biāo)模板中歸類(lèi)為目標(biāo)的像素個(gè)數(shù)設(shè)為a(則歸類(lèi)為背景的像素個(gè)數(shù)為m-a)。因此,PPM縮放指標(biāo)δ可由下式表示:

上式中ε1和ε2是與目標(biāo)窗口中圖像直方圖相關(guān)的非零系數(shù),由式(6)得,我們所取的PPM縮放指標(biāo)跟當(dāng)前目標(biāo)像素?cái)?shù)是線(xiàn)性單調(diào)關(guān)系。目標(biāo)選定后,m和a的值就定了,ε1和ε2也能計(jì)算得到。顯然,m肯定大于a;而且選定目標(biāo)時(shí),目標(biāo)窗口一般為目標(biāo)的外接矩形。因此(ε1m-(ε1+ε2)a),一般小于 0,所以式(6)一般為單調(diào)減函數(shù)(為排除特殊情況,我們?cè)谒惴▽?shí)現(xiàn)的時(shí)候,預(yù)先計(jì)算了該函數(shù)的系數(shù),以確定其單調(diào)性)。
3 改進(jìn)后的PPM算法跟蹤實(shí)驗(yàn)結(jié)果
文中基于Visual Studio 2010和OpenCV2.3實(shí)現(xiàn)所有仿真實(shí)驗(yàn)代碼。有關(guān)OpenCV的介紹及使用方法可以參看文獻(xiàn)[3-4],實(shí)驗(yàn)用計(jì)算機(jī)型號(hào)為DELL OPTIPLEX380。計(jì)算機(jī)硬件配置為 Intel Pentium(R)Dual-Core CPU E5800 3.2 GHz,3 GB內(nèi)存。
3.1 PPM縮放指標(biāo)實(shí)用性驗(yàn)證實(shí)驗(yàn)
實(shí)驗(yàn)中,被跟蹤目標(biāo)分別是一輛汽車(chē)和一個(gè)杯子上的圖標(biāo),汽車(chē)由近及遠(yuǎn),在畫(huà)面中漸漸變小;杯子的整個(gè)運(yùn)動(dòng)無(wú)規(guī)律,但其中有一段較明顯的先遠(yuǎn)離后靠近鏡頭的過(guò)程,目標(biāo)先變小,然后又變大。圖2(a)中給出了能反映兩目標(biāo)運(yùn)動(dòng)特征的相關(guān)幀。
圖2(b)中,兩曲線(xiàn)分別描繪了汽車(chē)和杯子在整個(gè)跟蹤過(guò)程中對(duì)應(yīng)PPM縮放指標(biāo)的變化情況。根據(jù)給出的實(shí)驗(yàn)結(jié)果我們看到:當(dāng)目標(biāo)尺寸縮小時(shí),PPM縮放指標(biāo)變大;目標(biāo)尺寸放大時(shí),PPM縮放指標(biāo)變小。實(shí)驗(yàn)結(jié)果表明:我們所設(shè)計(jì)的PPM縮放指標(biāo)能很好的反映跟蹤過(guò)程中目標(biāo)尺寸的大小情況。
3.2 PPM跟蹤算法改進(jìn)前后跟蹤效果對(duì)比
圖3中,用傳統(tǒng)的PPM跟蹤算法對(duì)目標(biāo)進(jìn)行跟蹤時(shí),由于目標(biāo)窗沒(méi)能及時(shí)根據(jù)目標(biāo)大小進(jìn)行自適應(yīng)變化,當(dāng)目標(biāo)尺寸逐漸縮小時(shí),目標(biāo)窗內(nèi)混入其他目標(biāo)或者大量背景,導(dǎo)致跟蹤目標(biāo)窗的中心發(fā)生偏移;而改進(jìn)后的目標(biāo)窗口自適應(yīng)PPM跟蹤算法,能很好的解決這個(gè)問(wèn)題,當(dāng)目標(biāo)尺寸發(fā)生變化時(shí)候,目標(biāo)窗能夠很好的自適應(yīng)目標(biāo)尺寸的變化,目標(biāo)窗始終能緊緊的包含住目標(biāo)。同樣,改進(jìn)后的PPM跟蹤算法也避免了當(dāng)目標(biāo)尺寸變大時(shí),目標(biāo)溢出目標(biāo)窗的情況。
3.3 改進(jìn)后PPM跟蹤算法計(jì)算性能分析
綜合表1第一、二列數(shù)據(jù)可以看到,我們?cè)O(shè)計(jì)的PPM縮放指標(biāo)的每幀計(jì)算耗時(shí)不到1 ms,由于在傳統(tǒng)PPM算法中,原本就要計(jì)算目標(biāo)及搜索區(qū)域圖像直方圖,在計(jì)算PPM縮放指標(biāo)時(shí)我們只需要將已計(jì)算好的數(shù)據(jù)拿來(lái)用即可。所以,相比基于其他特征來(lái)衡量目標(biāo)尺寸大小的縮放指標(biāo),在耗時(shí)方面,本文的縮放指標(biāo)要小很多。再看第一、三列數(shù)據(jù),發(fā)現(xiàn)當(dāng)跟蹤窗口實(shí)現(xiàn)自適應(yīng)變化時(shí),整個(gè)跟蹤算法的耗時(shí)反而減少了,究其原因是跟蹤窗變小時(shí),包含的像素?cái)?shù)減少,計(jì)算量自然也減少了。當(dāng)然,當(dāng)目標(biāo)窗變大時(shí),這個(gè)值也會(huì)變大。但是,不管目標(biāo)放大還是縮小,窗口自適應(yīng)的PPM算法,會(huì)保證目標(biāo)被恰好包含在窗口內(nèi),多余背景像素的計(jì)算將會(huì)盡可能減少,因此,其計(jì)算是高效率的。
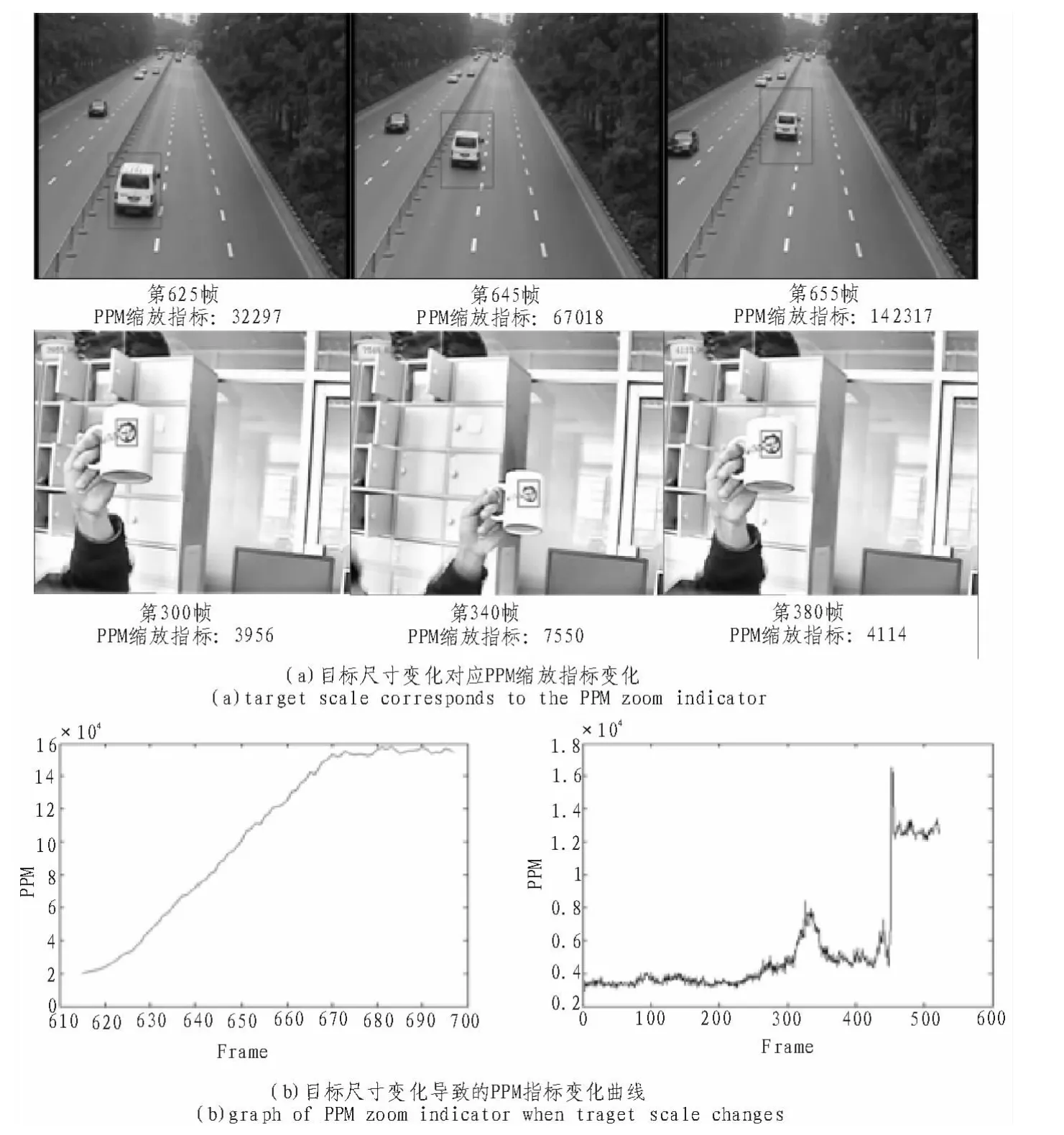
圖2 PPM縮放指標(biāo)實(shí)際應(yīng)用效果Fig.2 The actual effect of PPM zoom indicator
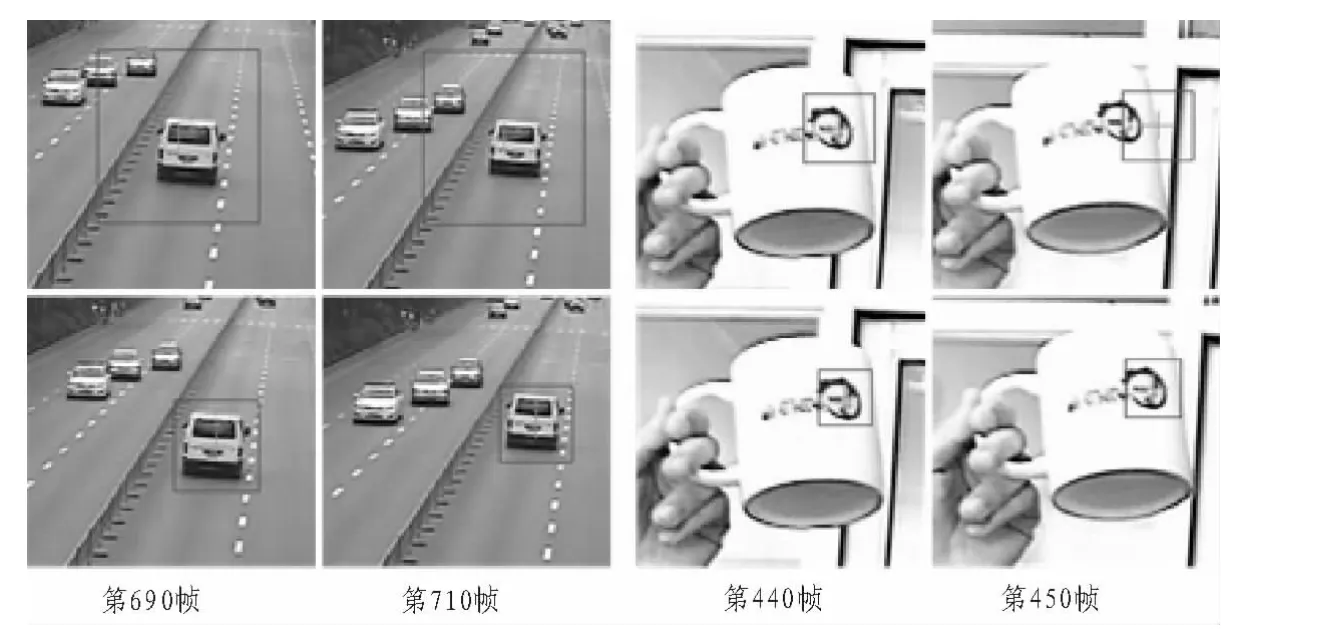
圖3 目標(biāo)窗未縮放與縮放情況下的跟蹤效果對(duì)比Fig.3 Tracking performance contrast in the case of the target window scale adaptive and non-adaptive

表1 PPM算法改進(jìn)前后計(jì)算性能對(duì)比Tab.1 Computing performance comparison of original PPM and improved PPM
4 嵌入式視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤系統(tǒng)設(shè)計(jì)
4.1 系統(tǒng)功能及硬件設(shè)計(jì)
視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤是在某一幀視頻中用檢測(cè)、人工選定等方法,對(duì)感興趣的區(qū)域或目標(biāo)進(jìn)行確定,并在后繼各幀中定位出這些目標(biāo)或區(qū)域,它把圖像處理、自動(dòng)控制、信息科學(xué)有機(jī)結(jié)合起來(lái),形成了一種能從圖像信號(hào)中實(shí)時(shí)地自動(dòng)識(shí)別目標(biāo),提取目標(biāo)位置信息,自動(dòng)跟蹤目標(biāo)運(yùn)動(dòng)的技術(shù)[5]。
完整的視覺(jué)目標(biāo)跟蹤系統(tǒng)一般可分為兩部分:目標(biāo)檢測(cè)和目標(biāo)跟蹤。目標(biāo)檢測(cè)作為另外一個(gè)圖像處理問(wèn)題也有很多人在研究;很多研究者采用人機(jī)交互的方式來(lái)確定目標(biāo):用鼠標(biāo)或控制臺(tái)上的按鈕在畫(huà)面中框選目標(biāo),以完成目標(biāo)檢測(cè)和識(shí)別的功能,本文的設(shè)計(jì)中采用了人機(jī)交互選定目標(biāo)的方式。圖4分別為實(shí)物簡(jiǎn)圖和系統(tǒng)硬件結(jié)構(gòu)圖。
整個(gè)系統(tǒng)包括支持PELCO-D協(xié)議的一體化球形攝像機(jī),TMS320DM642開(kāi)發(fā)板,控制臺(tái),顯示器等。系統(tǒng)的功能描述如下:通過(guò)顯示器,用戶(hù)能看到架在云臺(tái)上攝像機(jī)拍攝到的實(shí)時(shí)圖像,用戶(hù)通過(guò)撥動(dòng)操縱桿來(lái)控制攝像機(jī)角度和速度的變化,以達(dá)到在整個(gè)監(jiān)控環(huán)境中手動(dòng)搜索跟蹤目標(biāo)的目的,當(dāng)用戶(hù)通過(guò)顯示器發(fā)現(xiàn)目標(biāo)時(shí),可以通過(guò)小角度撥動(dòng)操縱桿來(lái)微調(diào)攝像機(jī)角度,以便將目標(biāo)定格在視野中央的跟蹤窗內(nèi)。最后,按下“開(kāi)始跟蹤”按鈕,系統(tǒng)便進(jìn)入自動(dòng)跟蹤狀態(tài),隨著目標(biāo)的移動(dòng),攝像機(jī)能保持隨動(dòng)狀態(tài),使得目標(biāo)始終處于視野的中央。當(dāng)用戶(hù)想停止跟蹤時(shí),只要撥動(dòng)一下操縱桿,系統(tǒng)就會(huì)立即停止跟蹤,切換到手動(dòng)搜索狀態(tài)。
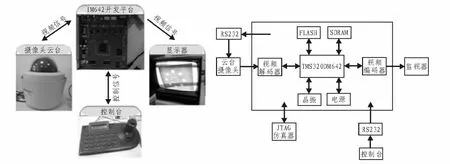
圖4 嵌入式視覺(jué)目標(biāo)跟蹤系統(tǒng)實(shí)物簡(jiǎn)圖及硬件結(jié)構(gòu)圖Fig.4 The physical map and hardware structure diagram of visual target tracking embedded system
4.2 改進(jìn)后的PPM算法移植及實(shí)際跟蹤效果
本文的嵌入式軟件是基于CCS2.2(Code Composer Studio)[6]開(kāi)發(fā)的。TI公司的C6000系列DSP支持C、線(xiàn)性匯編、匯編相結(jié)合的編程方案。在代碼移植過(guò)程中,我們采用了基于C語(yǔ)言的變量類(lèi)型優(yōu)化、內(nèi)聯(lián)函數(shù)優(yōu)化、編譯器優(yōu)化,存儲(chǔ)器優(yōu)化,線(xiàn)性匯編優(yōu)化等[7]方法對(duì)代碼進(jìn)行了一定優(yōu)化工作,以達(dá)到嵌入式系統(tǒng)運(yùn)行的實(shí)時(shí)性要求。圖5為本文設(shè)計(jì)的嵌入式視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤系統(tǒng)的實(shí)際跟蹤效果。
5 結(jié)束語(yǔ)
本文研究了PPM跟蹤算法,針對(duì)該算法在實(shí)際跟蹤過(guò)程中,存在跟蹤窗口不能自適應(yīng)變化而導(dǎo)致的目標(biāo)跟偏甚至跟丟的缺陷,進(jìn)行了改進(jìn),在綜合考慮算法計(jì)算性能和縮放指標(biāo)實(shí)際效果的基礎(chǔ)上,我們提出了一種PPM縮放指標(biāo)并實(shí)現(xiàn)了目標(biāo)窗口自適應(yīng)的PPM跟蹤算法,經(jīng)實(shí)驗(yàn)驗(yàn)證,改進(jìn)后的算法相比傳統(tǒng)PPM算法,有更好的跟蹤效果,同時(shí),算法的計(jì)算復(fù)雜性也沒(méi)有明顯增加。進(jìn)一步,我們基于TMS320DM642設(shè)計(jì)了一套嵌入式視覺(jué)目標(biāo)跟蹤系統(tǒng),對(duì)改進(jìn)后的PPM跟蹤算法進(jìn)行了DSP移植,最終實(shí)現(xiàn)了一套嵌入式視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤系統(tǒng),取得了較好的實(shí)際跟蹤效果。

圖5 嵌入式視覺(jué)運(yùn)動(dòng)目標(biāo)跟蹤系統(tǒng)的實(shí)際跟蹤效果Fig.5 The tracking results of visual target tracking embedded system
[1]馮祖仁,呂娜,李良福.基于最大后驗(yàn)概率的圖像匹配相似性指標(biāo)研究 [J].自動(dòng)化學(xué)報(bào),2007,33(1):1-8.
FENG Zu-ren,LV Na,LI Liang-fu.Research on image similarity criterion based on maximum posterior probability[J].Acta Automatica Sinica,2007,33(1):1-8.
[2]Comaniciu D,Ramesh V,MEER P.Kernel based object tracking[J].IEEE Trans.on Pattern Analysis and Machine Intelligence,2003,25(5):564-575.
[3]劉瑞禎,于仕琪.OpenCV教程—基礎(chǔ)篇[M].北京:北京航空航天大學(xué)出版社,2007.
[4]Bradski Gray,Kaebler Adrian.Learning OpenCV:Computer Vision with the OpenCV Library[M].O’REILLY Press,2009.
[5]李偉.視頻圖像中的運(yùn)動(dòng)目標(biāo)跟蹤算法研究[D].南京:東南大學(xué)自動(dòng)化學(xué)院,2009.
[6]尹勇,歐光軍,關(guān)榮鋒.DSP集成開(kāi)發(fā)環(huán)境CCS開(kāi)發(fā)指南[M].北京:北京航空航天大學(xué)出版社,2003.
[7]TexasInstruments.TMS320C6000 OptimizingCompiler User’s Guide[R].USA,Texas:Texas Instruments,2008.
猜你喜歡
今日農(nóng)業(yè)(2021年9期)2021-11-26 07:41:24
發(fā)明與創(chuàng)新·小學(xué)生(2021年3期)2021-03-25 11:48:49
電子制作(2019年7期)2019-04-25 13:17:14
電子制作(2018年18期)2018-11-14 01:48:16
鐵道通信信號(hào)(2018年2期)2018-04-18 12:18:23
電鍍與環(huán)保(2016年3期)2017-01-20 08:15:32
中國(guó)科技博覽(2016年2期)2016-04-25 20:32:39
小學(xué)生導(dǎo)刊(2016年34期)2016-04-11 00:49:44
電測(cè)與儀表(2015年5期)2015-04-09 11:30:52
單片機(jī)與嵌入式系統(tǒng)應(yīng)用(2014年9期)2014-03-11 15:35:13