基于Modelica的光刻機超精密工件臺建模與仿真
2013-11-13 03:44:40陳鵬飛王彥偉
湖北工業(yè)大學(xué)學(xué)報 2013年2期
陳鵬飛, 王彥偉
(華中科技大學(xué)國家CAD支撐軟件工程技術(shù)研究中心, 湖北 武漢 430074)
超精密工件臺系統(tǒng)是光刻機的核心部件之一,具有定位精度高、響應(yīng)速度快、動態(tài)性能好等特點[1-3].文獻[4]采用Matlab和Adams聯(lián)合仿真的方法分析工件臺的振動特性,并對工件臺進行軌跡規(guī)劃,取得較好的分析結(jié)果.由于需要將Adams中的數(shù)據(jù)轉(zhuǎn)換到Matlab中,過程繁瑣容易造成數(shù)據(jù)丟失.傳統(tǒng)仿真大都基于某一特定領(lǐng)域軟件,只能有效應(yīng)對某單一領(lǐng)域的建模仿真.鑒于此,為了更加完整地仿真分析工件臺系統(tǒng),多領(lǐng)域仿真技術(shù)就顯得尤為重要.Modelica語言采用面向?qū)ο蟮慕K枷肟梢詫︸詈嫌袡C械、控制、電氣、熱、流體等多個領(lǐng)域的復(fù)雜產(chǎn)品進行物理建模和仿真分析[5].本文采用Modelica語言對工件臺系統(tǒng)進行多領(lǐng)域統(tǒng)一建模和仿真:首先給出了直線電機、控制以及工件臺的數(shù)學(xué)模型;再基于這些子模型搭建工件臺系統(tǒng)的Modelica多領(lǐng)域仿真模型;最后給定參數(shù),對工件臺進行仿真分析.
1 永磁同步直線電機建模
永磁同步直線電機(permanent magnetic linear synchronous motors,PMLSM)因其響應(yīng)快、直接驅(qū)動的特點廣泛應(yīng)用于各種精密、超精密加工設(shè)備中.本文所研究的光刻機超精密工件臺系統(tǒng)就采用PMLSM作為驅(qū)動工件臺部分的執(zhí)行機構(gòu).鑒于PMLSM的強耦合性和非線性,為了便于分析,將電機方程按照統(tǒng)一電機理論作線性變換,實現(xiàn)耦合方程的解耦.建立在d-q軸坐標系下的PMLSM數(shù)學(xué)模型[6]如下:

電磁推力方程
電機機械運動方程
Fe=mpv+Bv+Fl.
上述各式中:ud,uq,id,iq,ψd,ψq,Ld,Lq分別表示永磁同步直線電機d軸和q軸的電壓,電流,磁鏈,電感;Rs表示PMLSM的定子電阻;p為微分算子,p=d/dt;ω為PMLSM直線速度折合成的等效旋轉(zhuǎn)電機角速度,ω=πv/τ;v為動子的運動速度;τ為極距;P為電機的極對數(shù);Fe為電磁推力,Kt為推力常數(shù);Fl為負載阻力;B為與速度相關(guān)的粘滯系數(shù);m為電機運動部分的質(zhì)量,包括動子以及動子所帶動負載的質(zhì)量.
2 工件臺動力學(xué)建模
光刻工件臺采用的是H型結(jié)構(gòu),由水平向X導(dǎo)軌和水平向Y1Y2導(dǎo)軌組成,可以實現(xiàn)X、Y和θz三個自由度的運動.X向電機的動子與曝光卡盤固接構(gòu)成了微動臺,當(dāng)微動臺發(fā)生微小轉(zhuǎn)動時,可以獲得微動臺上的坐標原點(加工點)與微動臺的質(zhì)心之間的關(guān)系[7].令微動臺的質(zhì)量為M(包括直線電機動子質(zhì)量),繞質(zhì)心處轉(zhuǎn)動慣量為J,對微動臺進行受力分析,最終得到工件臺動力學(xué)模型:
式中:FX,FY1,FY2分別是直線電機X,Y1,Y2的實際驅(qū)動力;L1和L2分別為Y1,Y2電機動子質(zhì)心到工件臺質(zhì)心的距離.
3 控制系統(tǒng)建模
為了能夠進行高精度、高速度的運動,工件臺除了需要進行準確的動力學(xué)建模外,還必須有相應(yīng)的控制策略.本文基于空間矢量脈寬調(diào)制(space vector pulse width modulation,SVPWM)控制策略,采用位置環(huán)、速度環(huán)、電流環(huán)的三閉環(huán)控制方案.為了提高系統(tǒng)性能位置環(huán)采用PID調(diào)節(jié)器,速度環(huán)和電流環(huán)則分別采用PI調(diào)節(jié)器.由于光刻機在工作時,上位機發(fā)給工件臺的指令是精密工件臺的X,Y,θz三個方向的位置,而工件臺驅(qū)動電機輸出的是三個電機的位置,所以在對工件臺進行控制前需要對其驅(qū)動電機進行坐標變換.根據(jù)以上分析搭建控制領(lǐng)域的Modelica模型如圖1所示.
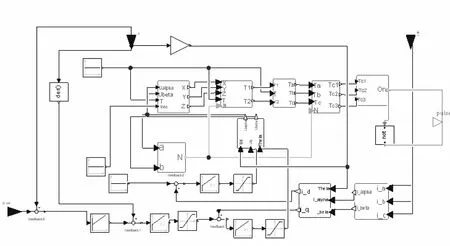
圖 1 控制系統(tǒng)Modelica模型
4 工件臺系統(tǒng)多領(lǐng)域模型的建立
根據(jù)以上對光刻機精密工件臺各個子模型的分析,采用基于Modelica的建模方式建立光刻機精密工件臺仿真模型庫,主要包括永磁同步直線電機模型、工件臺動力學(xué)模型、PID控制器模型、空間矢量脈寬調(diào)制模型、逆變器模型、理想電源模型等子模型.根據(jù)模塊化的思想在Mworks仿真平臺上采用組件連接的方式將各子模型連接構(gòu)成光刻機超精密工件臺的參數(shù)化多領(lǐng)域仿真模型.該模型是機械、電氣、控制的耦合體.為簡便起見,只給出工件臺X向運動系統(tǒng)圖,最終模型如圖2所示.
5 仿真結(jié)果分析
在仿真實驗中采用交流永磁同步直線電機參數(shù)P=2,Rs=10 Ω,Ld=Lq=0.01 H,ψf=0.5 Wb,m=10 kg,τ=0.01 m,空間矢量脈寬調(diào)制頻率f=10 000 Hz,電壓Udc=50 V.速度控制器的系數(shù)Kspeed=200,Tspeed=2;d軸和q軸方向電流控制器的系數(shù)分別為Kd=200,Td=0.5,Kq=150,Tq=0.5;位置PID控制器的系數(shù)分別為Kposition=300,Tip=10,Tdp=0.0005.輸入不同信號進行試驗,X向電機對位移為S型曲線和階躍信號的響應(yīng)分別如圖3和圖4所示.由圖3可以看出X向軌跡跟蹤穩(wěn)態(tài)誤差可以達到納米級精度.對比圖3和圖4可以看出工件臺對不同軌跡的響應(yīng),其運動精度是不同的.因此,設(shè)計出合理的超精密工件臺運動軌跡算法對于提高光刻機的運動精度、加工精度和運行效率具有十分重要的意義.
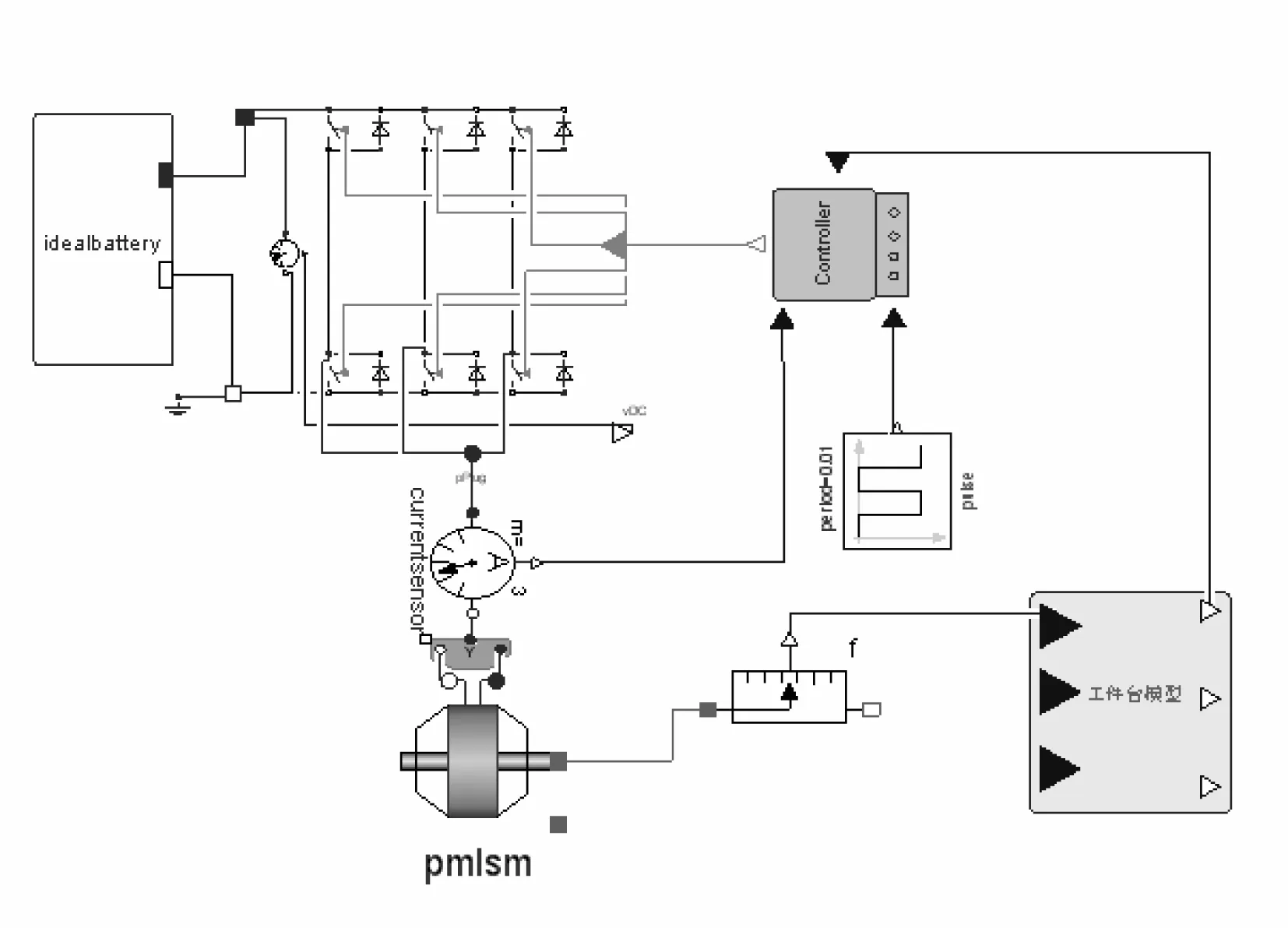
圖 2 工件臺X向控制模型
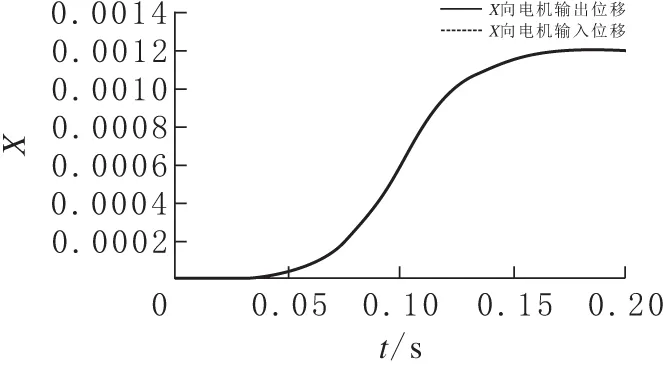
圖 3 X向電機位移的S型曲線響應(yīng)
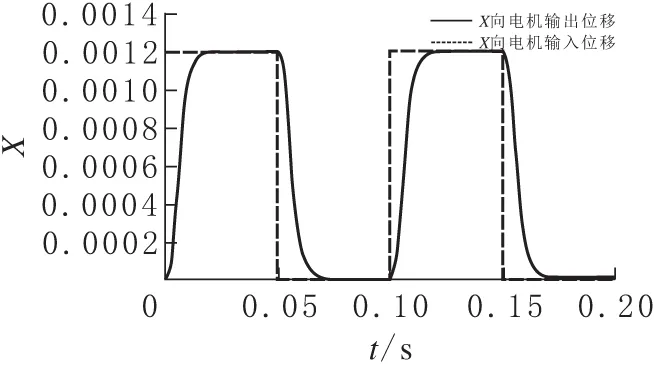
圖 4 X向電機位移的階躍響應(yīng)
6 結(jié)束語
本文采用面向?qū)ο蟮奈锢斫UZ言Modelica,建立了包含控制、電氣及機械領(lǐng)域的光刻機超精密工件臺多領(lǐng)域仿真模型庫.該模型保留了工件臺的多領(lǐng)域結(jié)構(gòu)屬性,具有良好的模型重用性,可以用于對工件臺進行多領(lǐng)域耦合分析以及軌跡規(guī)劃算法的比較分析.
[參考文獻]
[1] 朱 煜,尹文生,段廣洪.光刻機超精密工件臺研究[J].電子工業(yè)專用設(shè)備,2004,(109):25-27.
[2] 汪勁松.我國“十五”期間IC制造裝備的發(fā)展戰(zhàn)略研究[J].機器人技術(shù)與應(yīng)用,2002(1):5-9.
[3] 董吉洪,田興志,李志來,等.100nm步進掃描光刻機工件臺、掩模臺的發(fā)展[J].光機電信息,2004,(5):20-24.
[4] 鮑秀蘭.光刻機精密氣浮工件臺振動特性分析及運動控制[D].武漢:華中科技大學(xué)圖書館,2007.
[5] 趙建軍,丁建完,周凡利,等.Modelica語言及其多領(lǐng)域統(tǒng)一建模與仿真機理[J].系統(tǒng)仿真學(xué)報,2006,18(2):570-573.
[6] 金建勛,鄭陸海.基于SVPWM的永磁同步直線電機模型仿真[J].智能系統(tǒng)學(xué)報,2009,4(3):251-257.
[7] 縢 偉,高青風(fēng),武 鑫,等.超精密工作臺多自由度運動控制[C]//中國自動化學(xué)會控制理論專業(yè)委員會,第三十屆中國控制會議,山東煙臺,2011.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
民用飛機設(shè)計與研究(2020年4期)2021-01-21 09:15:02
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
電子制作(2018年18期)2018-11-14 01:48:24
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:22
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
核科學(xué)與工程(2015年4期)2015-09-26 11:59:03
中國中醫(yī)藥現(xiàn)代遠程教育(2014年11期)2014-08-08 13:23:44
終身教育研究(2014年5期)2014-02-28 01:23:06