基于方位特征集的兩轉動(0T-2R)并聯機構的型綜合及其應用
2013-12-05 06:58:10鄧嘉鳴尹洪波沈惠平楊廷力
中國機械工程 2013年24期
鄧嘉鳴 尹洪波 沈惠平 李 菊 楊廷力
常州大學,常州,213016
0 引言
目前,國內外對并聯機構進行型綜合的理論與方法主要有三種,即基于位移子群的方法、基于螺旋理論的方法及基于方位特征(position and orientation characteristics,POC)集的方法,且人們已運用上述三種方法綜合出了較多并聯機構新機型。應用基于位移子群的方法,文獻[1-4]先后研究了三自由移動并聯機構、三自由度球面并聯機構以及非對稱的2T1R和1T2R三自由度并聯機構的型綜合;李秦川等[5]綜合出4種三移動并聯機構。應用基于螺旋理論的方法,Kong等[6]、Fang等[7]分別對球面并聯機構、4~5個自由度過約束并聯機構進行了型綜合;黃真及其團隊對3~5個自由度對稱并聯機構進行了綜合,并得到了30多種可實現連續運動的對稱五自由度并聯機構[8-9]。應用基于方位特征的方法,楊廷力及其團隊對并聯機構的拓撲結構設計進行了系統研究,沈惠平等[10-11]分別對三平移與六自由度并聯機構進行了型綜合,分別得到26種與10種機型;羅玉峰等[12-13]分別對兩平移兩轉動與三平移一轉動并聯機構進行了型綜合,分別得到27種與43種機型;文獻[14]綜合出了43種三自由度并聯機構、31種四自由度并聯機構、22種五自由度并聯機構,以及8種六自由度并聯機構。
兩轉動并聯機構具有結構簡單、實用性強的特點,主要應用于機器人關節、衛星天線的方位跟蹤系統、攝像機定位系統以及醫療器械等方面,因而具有重要的實用價值,但目前對兩自由度并聯機構的型綜合研究較少。高峰等[15]利用GF集理論進行型綜合,列出了以符號組合形式表示的26種兩支路結構的機型,給出了4種機構的簡圖;曾達幸等[16]根據運動綜合法思想,提出了一種轉動解耦并聯機構的機型綜合方法,并綜合出多種兩自由度轉動解耦并聯機構;東昕[17]基于現有的三種兩自由度球面并聯機構(Omni-WristⅢ機構、球面5R 機構、3-RSR&1-SS機構),提出了兩種新型的球面并聯機構,并從中優選出一種能滿足噴泉運動要求的構型。
本文應用基于POC集的機構型綜合方法,對兩轉動(0T-2R)輸出并聯機構進行了拓撲結構綜合,得到了14種機型,其中,6種機型為本方法綜合得到,然后按它們的結構特性進行了初步分類,并將優選的一種兩轉動并聯機構用于太陽能二軸跟蹤機構的研制。
1 兩轉動并聯機構的型綜合及其結構分析
基于POC集的并聯機構型綜合理論與方法詳見文獻[14],這里只給出主要步驟。
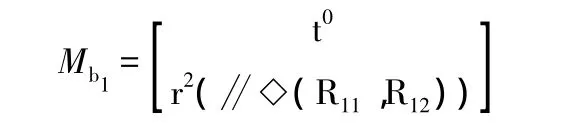
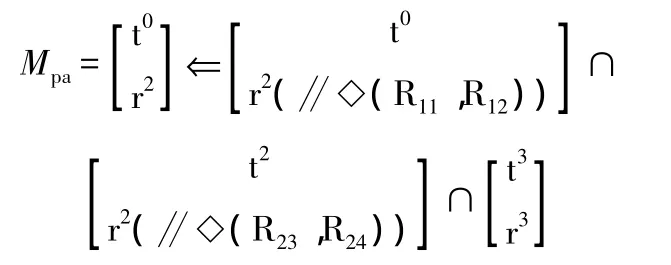
1.1 確定期望得到的機構的POC集Mpa
Mpa的表達式如下:

其中,t0表示不存在有限移動,r2表示存在兩個有限轉動。
1.2 支路結構的綜合
(1)支路的POC集。并聯機構的POC方程:

式中,Mbj為當其他支路不在時,第j條SOC支路末端構件的POC集。
并聯機構的POC集是各支路POC集的交集,于是,支路的POC集可取為

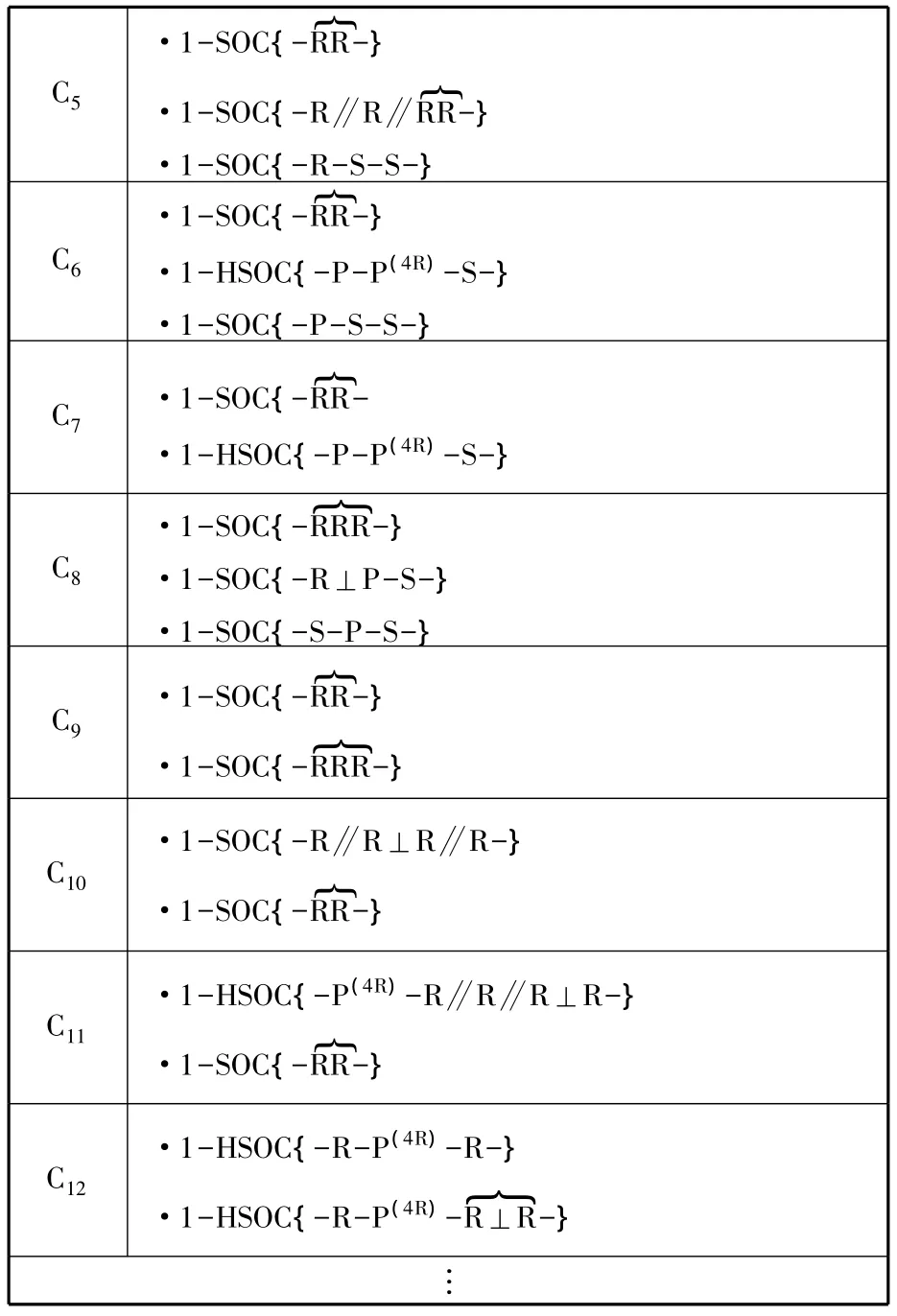
(2)支路的結構類型。滿足上述POC集的簡單支路(SOC)與復合支路(HSOC)的結構類型如表1所示。
1.3 支路組合方案
利用表1中的SOC支路和HSOC支路,可綜合出表2所示的組合方案。
現以表2中C3支路的組合方案為例,綜合1個兩轉動(0T-2R)并聯機構。C3支路的組合方案為
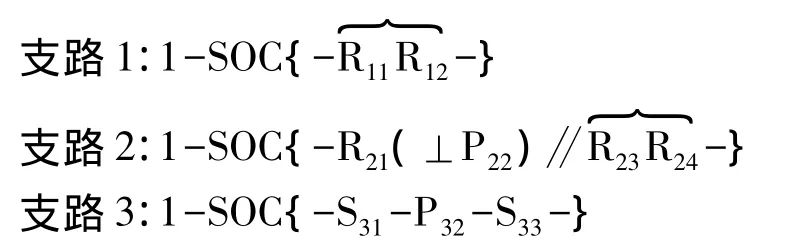
1.4 確定支路在兩平臺裝配的幾何條件
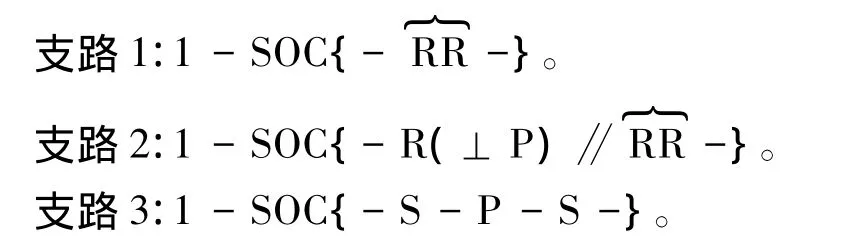
(1)確定支路末端構件的POC集。
支路1:

表1 SOC與HSOC的結構類型
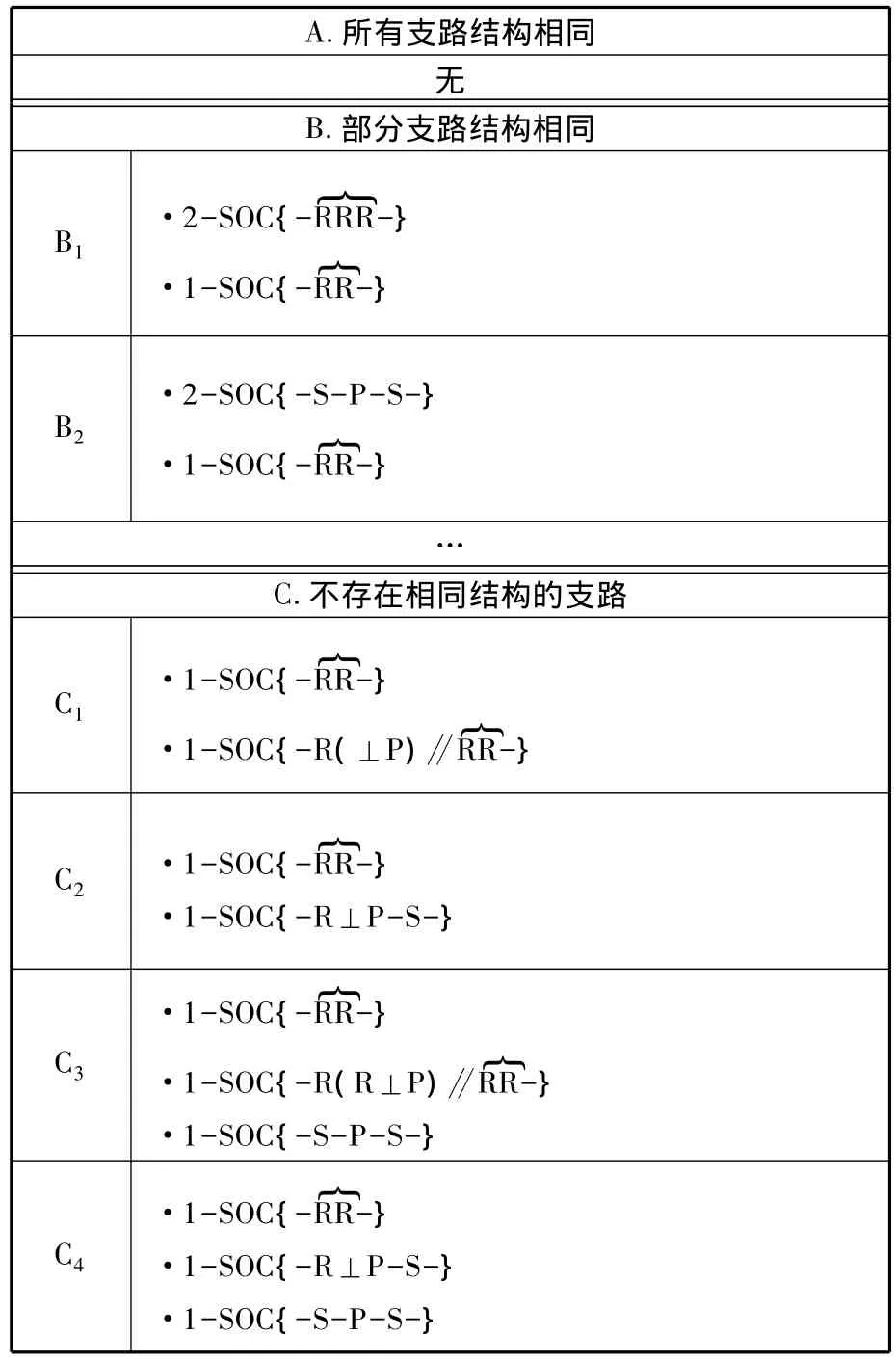
表2 并聯機構的支路組合方案
(續表2)
其中◇(R11,R12)表示由 R11、R12構成的平面,下同。
支路2:
支路3:
(2)建立并聯機構POC方程:
(3)確定支路在兩平臺裝配的幾何條件。為實現動平臺的兩維轉動,應使兩支路POC的交集保留兩個獨立轉動元素,即裝配的幾何條件為:R11與R12正交,R11∥R23∥R21且R12與R24的軸線重合。
(4)畫出機構簡圖。根據各支路拓撲結構特征以及支路在兩平臺裝配的幾何條件,畫出機構簡圖,如圖1所示。
1.5 檢驗機構自由度
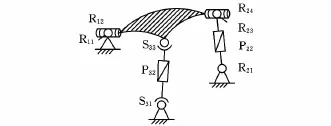
圖11 -SOC{-}⊕1-SOC{-R(⊥P)∥-}⊕1-SOC{-S-P-S-}
(1)確定第一個獨立回路的獨立位移方程數ξL1。第一、二條支路組成的第一個獨立回路的ξL1為

式中,dim{}為求維數的函數。
第一條、第二條支路組成的子并聯機構的自由度為

(2)第一條、第二條支路組成的子并聯機構動平臺的POC集為


(4)確定并聯機構自由度:

1.6 判斷機構消極運動副
由消極運動副的判斷準則[14],判斷R24副是否為消極運動副。
(2)確定新機構的自由度。首先確定由第一條、第二條支路組成的第一個獨立回路的獨立位移方程數ξL1:

第一條、第二條支路組成的子并聯機構的自由度為

第一條、第二條支路組成的子并聯機構動平臺的POC集為
然后再確定第二個獨立回路的獨立位移方程數ξL1:

最后可得到并聯機構的自由度:

(3)判斷消極運動副。由于新機構的自由度為1,而原機構的自由度為2,則被剛化的運動副不是消極運動副。
1.7 選取機構的驅動副
基于驅動副判定準則[14],判定圖1中機構的P22與P32副可否同時為驅動副。
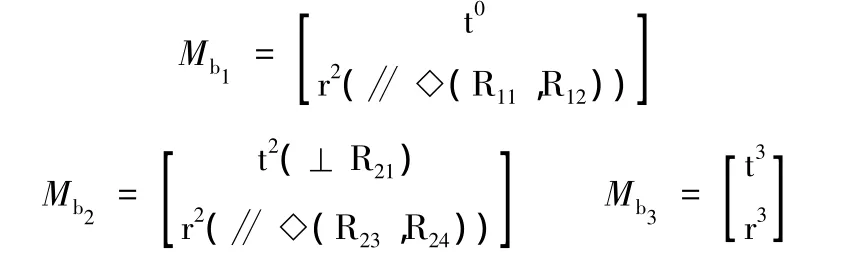
第二支路的自由度為3,可在Mb2中任選3個為獨立元素,則另外一個為非獨立元素;第三支路的自由度為5,可在Mb3中任選5個為獨立元素,則另外一個為非獨立元素。
(2)確定新機構的自由度。
首先確定的第一條、第二條支路組成的第一個獨立回路的獨立位移方程數ξL1。

其中,Mb2取兩個有限移動和一個有限轉動為獨立元素。
第一條、第二條支路組成的子并聯機構的自由度為

第一條、第二條支路組成的子并聯機構動平臺的POC集為
然后,確定第二個獨立回路的獨立位移方程數ξL2:

其中,在Mb3中取t3為獨立元素。
最后確定并聯機構的自由度:

(3)判定P22與P32副可否同時為驅動副。
由于新機構的自由度0,按照驅動副判定準則,圖1所示的機構同一平臺上的P22與P32副可同時為驅動副。
1.8 確定并聯機構的拓撲結構
(1)支路拓撲結構。
(2)兩平臺的拓撲結構。
動平臺上:R11與R12正交,R11∥R23且R12與R24的軸線重合。
靜平臺上:R11∥R21。
1.9 并聯機構拓撲結構的特性分析

取第二個單開鏈為SOC{-R(R12-R14)-S31-P32-S33-}。需計入繞R12與R24公共軸線的轉動 R(R12-R14),其約束度 Δ2為

由BKC的判定方法可知,該機構包含兩個BKC,其耦合度為
(2)自由度類型。基于自由度類型判定準則,該機構具有部分自由度。
(3)運動輸入-輸出解耦性。基于拓撲結構的解耦原理,已知該機構具有部分自由度,因此具有運動輸入-輸出解耦性。
2 拓撲結構類型的分類
按照上述綜合方法,選取表2中其他組合方案,已綜合出了14種機型,如表3所示。進一步,按支路類型、是否含有復雜支路、是否具有解耦性、運動學與動力學復雜性,以及轉動輸出類型,對表3中的機構進行分類,以供設計人員參考與選用。
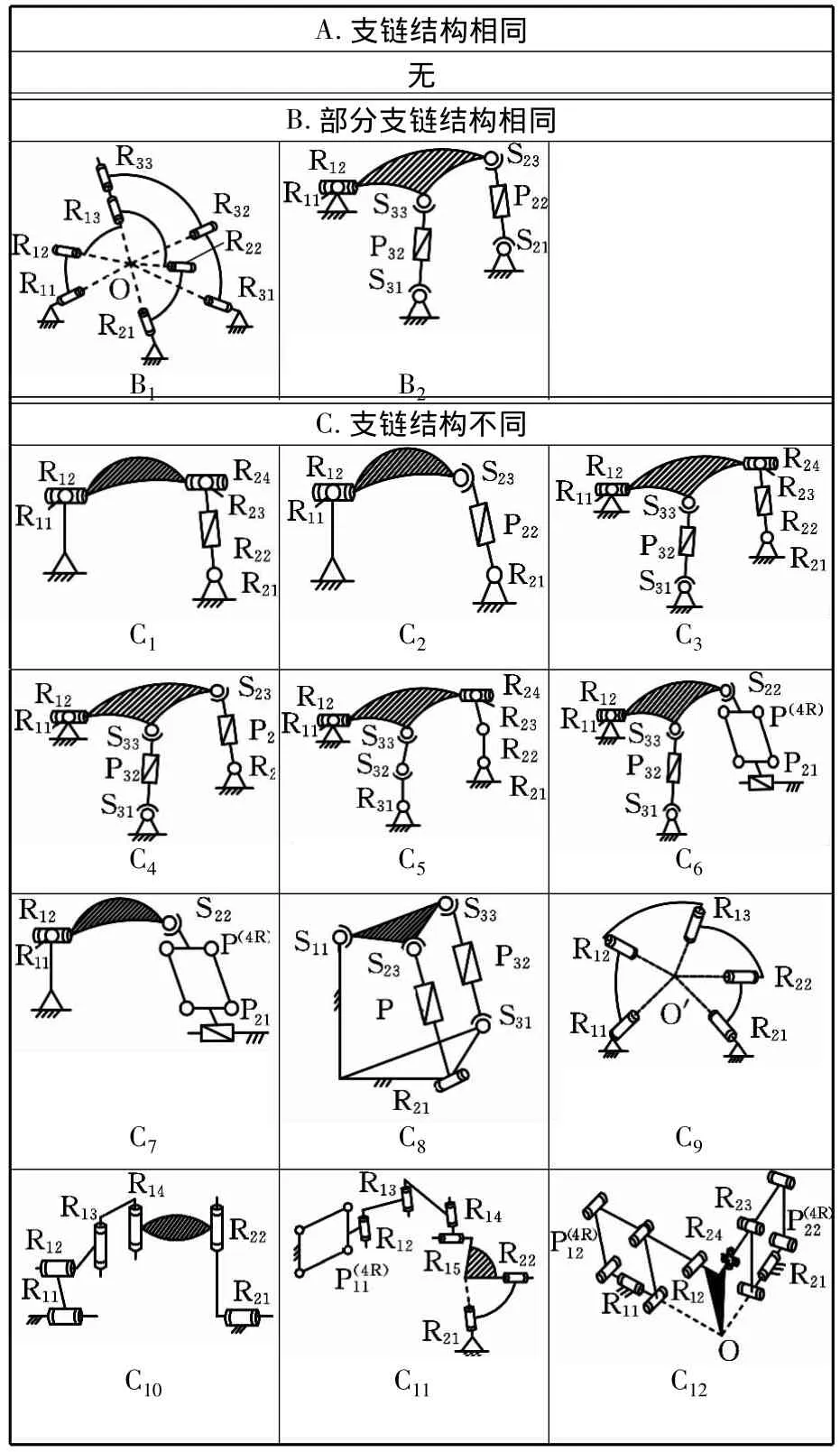
表3 兩轉動(0T-2R)并聯機構拓撲結構
(1)是否含有相同支路的并聯機構:①無所有支路相同的并聯機構;②兩條支路相同的并聯機構,如表3中B1、B2所示機構;③支鏈結構不同的并聯機構。如表3中C1~C12所示的機構。
(2)含有復雜支路的并聯機構:表3中C6、C11、C12所示的機構。
(3)具有運動解耦性的機構:表3中B2、C1~C8、C10~C12所示的機構。
(4)基于耦合度的運動(動力)學復雜性。已計算所綜合出的14種并聯機構耦合度值均為0,因此,可直接得到其運動學、動力學解析式,其分析過程較為簡單。
(5)轉動輸出類型。根據文獻[18-20],兩轉動輸出機構分為純球面轉動、非球面轉動兩種情況,因此,表3中,作純球面轉動的有 B1、C9,其他均為非球面轉動,這有利于不同類型應用場合時選用。
3 優選機型的設計與應用
已綜合出的 14 種機型(表 3)中,B1、B2、C1、C2、C9、C10、C11、C12已有相應文獻報道,而 C3,C4,…,C8這6種機型為作者按照上述理論方法新綜合得到,這些新機型為二自由度的轉動關節、衛星天線的方位跟蹤系統、攝像機定位系統等提供了侯選設計方案。筆者已將C3機型用于太陽能二軸跟蹤機構,其機構設計如圖2所示,并已對該機構進行了運動學性能分析,包括機構工作空間、機構誤差分析,并運用遺傳算法對機構的結構參數進行了優化計算,其工作空間如圖3所示,其樣機研制在進行中。
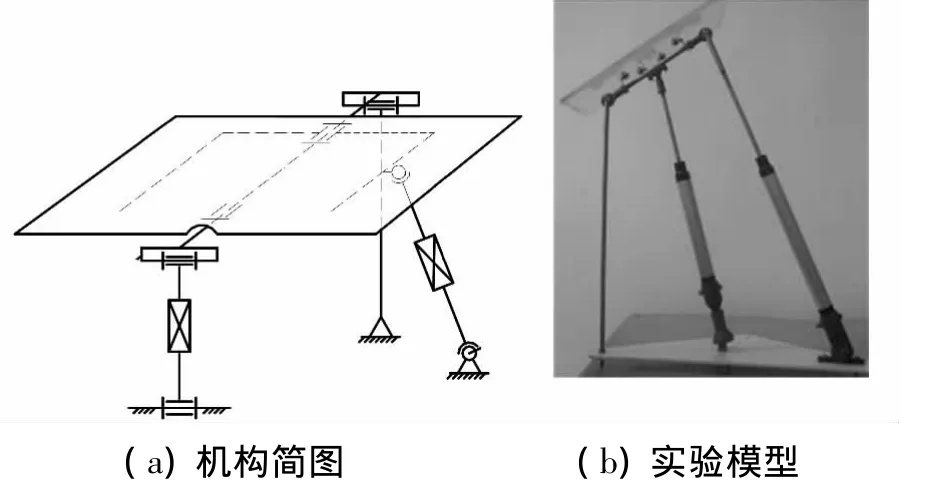
圖2 二自由度太陽能跟蹤機構
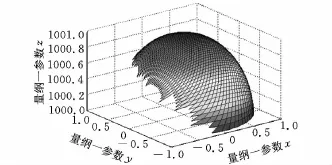
圖3 二軸跟蹤機構的工作空間
5 結論
(1)根據基于方位特征集的拓撲結構設計理論,對兩轉動(0T-2R)并聯機構進行了型綜合,得到了14種機型,其中8種機型已有文獻報道,而6種機型為筆者按照上述理論方法綜合得到,這些機型為二自由度的轉動關節、衛星天線的方位跟蹤系統、攝像機定位系統的實用與設計等提供了優選設計方案。
(2)該方法運算規則少、數學方法簡單,幾何與物理意義明確,適用于所有無過約束和一般過約束機構。
[1]Hervé J M,Sparacino F.Structural Synthesis of Parallel Robots Generating Spatial Translation[C]//5th IEEE International Conference on Advanced Robotics.Pisa,Italy,1991:808-813.
[2]Karouia M,Hervé J M.A Family of Novel Orientational 3-DOF Parallel Robots.Robotics Manufacturing Systems[C]//14th CISM-IFToMM Symposium.Udine,Italy,2002:359-368.
[3]Karouia M,Hervé J M.Asymmetrical 3-dof Spherical Parallel Mechanisms[J].European Journal of Mechanics A/Solids,2005,24:47-57
[4]Lee C C,Herve J M.Translational Parallel Manipulators with Doubly Planar Limbs[J].Mechanism and Machine Theory,2006,41(4):433-455.
[5]李秦川,黃真.基于位移子群分析的3自由度移動并聯機構型綜合[J].機械工程學報,39(6):18-21.Li Qinchuan,Huang Zhen.Type Synthesis for 3-DOF Translation Parallel Mechanisms Based on Displacement Subgroup[J].Chinese Journal Mechanical Engineering,39(6):18-21.
[6]Kong X W,Gosselin C M.Type Synthesis of 3-DOF Spherical Parallel Manipulators Based on Screw Theory[C]//Proceedings of ASME Design Engineering Technical Conferences.Montreal,2002:MECH-34259.
[7]Fang Y F,Tsai L W.Structure Synthesis of a Class of 4-DOF and 5-DOF Parallel Manipulators with Identical Limb Structures[J].Int.J.Rob.Res.,2002,21:799-810.
[8]Huang Z,Li Q C.Type Synthesis of Symmetrical Lower-mobility Parallel Mechanisms Using Constraint-synthesis Method[J].Int.J.Rob.Res.,2003,22:59-79.
[9]Li Q C,Huang Z.A Family of Symmetrical Lower-mobility Parallel Mechanism with Spherical and Parallel Subchains[J].J.Rob.Syst.,2003,20(6):297-305.
[10]余同柱,沈惠平,鄧嘉鳴,等.方位特征集法在三平移并聯機構型綜合中的應用[J].機械設計,2012,29(8):48-54.Yu Tongzhu,Shen Huiping,Deng Jiaming,et al.Application of POC Set Method in Structure Synthesis of 3-translation Parallel Manipulator[J].Journal of Machine Design,2012,29(8):48-54.
[11]鄧嘉鳴,余同柱,沈惠平,等.基于方位特征的六自由度并聯機構型綜合[J].中國機械工程,2012,23(21):2525-2640.Deng Jiaming,Yu Tongzhu,Shen Huiping,et al.Type Synthesis for 6-DOF Novel Parallel Mechanisms Based on POC Set Method[J].China Mechanical Engineering,2012,23(21):2525-2640.
[12]羅玉峰,姚偉科,石志新,等.基于方位特征集的兩平移兩轉動并聯機構拓撲結構綜合與分類[J].機床與液壓,2011,39(3):22-25.Luo Yufeng,Yao Weike,Shi Zhixin,et al.Structure Synthesis and Classification of 2-Translation and 2-Rotation Parallel Manipulator Based on POC Approach[J].Machine Tool & Hydraulics,2011,39(3):22-25.
[13]羅玉峰,劉卓,石志新,等.三平移-轉動并聯機構型綜合及分類[J].機械設計與研究,2010,26(5):40-43.Luo Yufeng,Liu Zhuo,Shi Zhixin,et al.Structural Synthesis and Classification of 3-Translation and 1-ratation Parallel Manipulator[J].Machine Design and Research,2010,26(5):40-43.
[14]楊廷力,劉安心,羅玉峰,等.機器人機構拓撲結構設計[M].北京:科學出版社,2012.
[15]高峰,楊加倫,葛巧德.并聯機器人型綜合的GF集理論[M].北京:科學出版社,2011.
[16]曾達幸,黃真.基于螺旋理論的轉動解耦并聯機構型綜合[J].中國科學:技術科學,2011,41(5):585-591.Zeng Daxing,Huang Zhen.Type Synthesis of the Rotational Decoupled Parallel Mechanism Based on Screw Theory[J].Sci.China Tec.Sci.,2011,41(5):585-591.
[17]東昕.2-DOF類球面并聯轉臺的設計及應用研究[D].北京:北京航空航天大學,2011.
[18]Gogu G.Structural Synthesis of Parallel Robots,Part 4:Other Topologies with Two and Three Degrees of Freedom[M].Berlin:Springer-Verlag,2012.
[19]Wu K,Yu J J,Zong G H,et al.Type Synthesis of 2-dof Rotational Parallel Manipulators with an Equal-diameter Spherical Pure Rolling Motion[C]//The 2013 ASME International Design Engineering Technical Conferences.Oregon,Portland,2013:DETC2013-12305.
[20]Wu K,Yu J J,Li S Z,et al.Type Synthesis of Two Degrees-of-Freedom Rotational Parallel Mechanisms with a Fixed Center-of-Rotation Based on a Graphic Approach[C]//The 2012 ASME International Design Engineering Technical Conferences.Chicago,USA,2012:ASME DETC2012-71028.
猜你喜歡
哲學評論(2021年2期)2021-08-22 01:53:34
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
兒童故事畫報(2019年5期)2019-05-26 14:26:14
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
現代企業(2015年9期)2015-02-28 18:56:50
