往復機械故障診斷轉速測量硬件電路設計
2014-01-01 02:18:08王立勇徐小力
設備管理與維修 2014年1期
關鍵詞:信號
陳 浩 賈 然 王立勇 徐小力
(北京信息科技大學現代測控技術教育部重點實驗室 北京)
往復機械具有結構復雜、工作條件惡劣、運行狀態不穩定的特點,在往復機械故障診斷中,曲軸轉速是最基本的參考信息,精確的測量曲軸轉速對往復機械曲軸相位鑒別具有非常重要的指導意義。對往復機械轉速測量方法和轉速測量中的脈沖調理電路進行研究,旨在提高傳感器調理電路在復雜環境下的抗干擾能力。為后續的轉速采集系統提供可靠的曲軸轉速信號。
一、轉速測量原理
現有的轉速測量方法主要包括基于霍爾型傳感器轉速測量方法、基于加速度計的轉速測量方法和基于振動信號的轉速測量方法。基于霍爾型傳感器轉速測量方法原理為:旋轉部件轉動時霍爾傳感器和感應器件之間的距離會發生變化,導致傳感器的磁場密度發生變化,從而引起霍爾電壓的變化。測量系統采集到霍爾電壓變化的周期或頻率,進而計算出部件轉速。
基于加速度計的轉速測量方法原理為:加速度計測量旋轉部件三維加速度,并計算得到向心加速度,由a=R(2πn)2得到部件轉速。基于振動信號的轉速測量方法原理為:采用一定的算法從旋轉部件振動信號中提取出轉速特征信號進而得到轉速信息。
二、調理電路
信號調理電路主要實現將傳感器輸出的高電壓方波轉化為5 V方波,以滿足單片機的工作電壓,保證單片機不被損毀,同時實現信號的濾波處理。以下對比了3種信號調理電路,歸納總結了各種電路的工作特點。
1.穩壓型信號調理電路
信號調理電路主要實現將傳感器輸出的高電壓方波轉化為5 V方波,以滿足單片機的工作電壓,保證單片機不被損毀,同時實現信號的濾波處理。穩壓型調理電路原理圖如圖1所示,24 V轉速脈沖信號從電阻左側輸入,施密特觸發反向器(SN74HC14D)對輸入脈沖信號進行整形,并輸出5 V脈沖信號。
電路工作原理:當輸入端電壓為24 V時,穩壓二極管被反向擊穿,二極管負極電壓穩定在4.7 V,此時芯片1管腳電平為高,經過邏輯取反以后,管腳2的電平轉化為低電平;當輸入端電壓為0 V時,芯片1管腳電平為低,經過邏輯取反以后,管腳2的電平轉化為高電平。如此,當輸入端輸入不同頻率的24 V脈沖時,輸出端輸出相應頻率的5 V脈沖。
電路特點:(1)該電路阻抗不為無窮大。(2)基于電路可靠性方面的考慮,當二極管發生損毀時,24 V電壓會直接輸入至施密特觸發器,造成芯片的損壞。(3)二極管反向偏置時存在的勢壘電容,影響了系統的高頻響應。
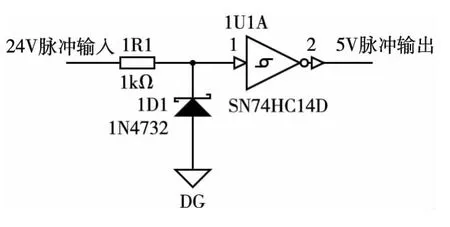
圖1 穩壓型調理電路
2.上拉型信號調理電路
上拉型調理電路原理圖如圖2所示,24 V轉速脈沖信號從二極管負極輸入,經過上拉電阻和RC低通濾波器濾波進入施密特觸發反向器(SN54HC14D)。芯片對輸入脈沖信號進行整形,經過整形的信號再次通過RC低通濾波器濾波對信號進行濾波,最終輸出5 V脈沖信號。
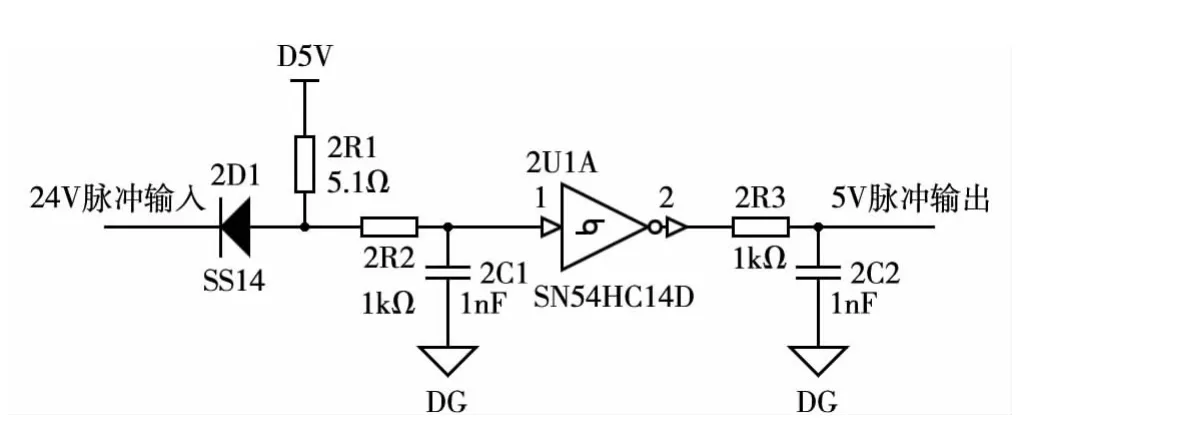
圖2 上拉型調理電路
電路工作原理為:當輸入端電壓為0 V時,二極管正向導通,直流5 V電壓通過上拉電阻和二極管接入地,芯片1管腳電平為低,經過邏輯取反后,輸出引腳2的電平轉化為高電平;當輸入端電壓為24 V時,二極管反向截止,直流5 V電壓通過上拉電阻和RC濾波器輸入至芯片的輸入管腳1上,此時芯片1管腳電平為高,經過邏輯取反以后,輸出管腳2的電平轉化為低。如此,當輸入端輸入不同頻率的24 V脈沖時,輸出端輸出相應頻率的5 V脈沖。
電路特點:由于二極管正向壓降的作用,當輸入端電壓為0 V時,芯片SN54HC14D輸入管腳的電壓卻不為0 V,而是二極管正向偏置電壓VF,且VF的大小會受上拉電阻2R1的影響,如圖3所示。
在往復機械故障診斷系統中,曲軸轉速信號往往會被輸入到多種設備中,各種設備之間由于阻抗不匹配的問題,可能會造成傳感器輸出的脈沖信號低電平電壓(VL)大于0,加之上拉型調理電路中二極管自身的偏置電壓VF,此時輸入到芯片SN54HC14D第1管腳的低電平電壓變為了VL+VF(圖4描述了二極管正極處的信號,該信號低電平電壓為680 mV,其中VL=56 mV,VF=624 mV)。如果VL+VF超過TTL電路中對于輸入低電平的定義,那么芯片會將所有的輸入信號全部識別為高電平,輸出信號全部轉換為低電平,導致信號調理功能失效。
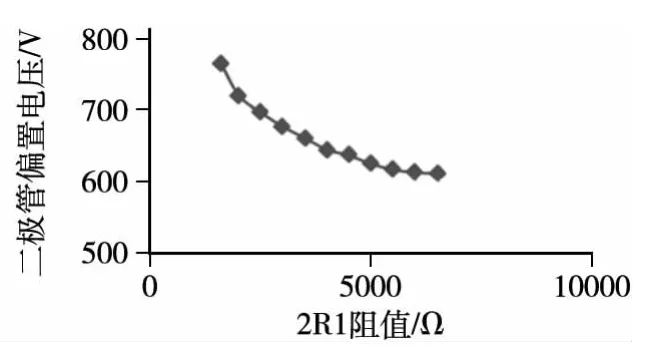
圖3 二極管偏置電壓VF與上拉電阻的關系
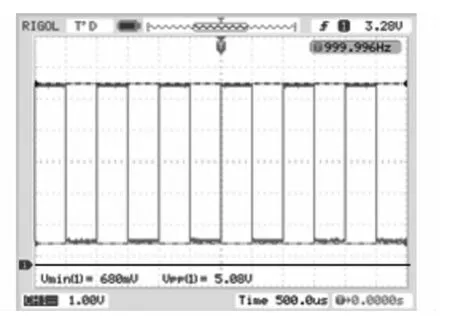
圖4 二極管正極信號波形
3.比較器型調理電路
為了解決傳感器輸出信號低電平發生微量偏移造成施密特觸發反向器無法識別低電平的問題,設計了比較器型調理電路。
比較器型調理電路用電壓比較器替換了上拉型調理電路中的二極管。該方案提高了電路的輸入阻抗,消除了傳感器輸出低電平電壓VL>0的現象,同時避免了二極管的偏置電壓。提高了系統在復雜環境下的抗干擾能力。比較器選用的是LM393AN芯片,電路原理圖如圖5所示。
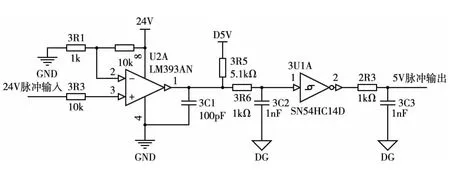
圖5 比較器型調理電路
工作原理:24 V電壓通過電阻3R1和3R2分壓后產生2.18 V的參考電壓,輸入至電壓比較器2管腳。當脈沖輸入端電壓高于2管腳的參考電壓(2.18 V)時,電壓比較器1管腳為高阻態,此時芯片SN54HC14D的1管腳電壓為5 V;當脈沖輸入端電壓低于2管腳的參考電壓(2.18 V)時,電壓比較器1管腳輸出低電平(0 V),此時芯片SN54HC14D的1管腳電壓也為0 V。可見該電路去除了傳感器輸出信號的偏移量。最后信號經施密特反向觸發器整形后輸出5V脈沖信號。
為了驗證比較器型調理電路的性能,將傳感器信號輸入至電路輸入端,由于阻抗不匹配致使傳感器信號發生了偏移,信號低電平偏至1.8V,高電平為24 V,如圖6所示。示波器讀取電路輸出端信號,如圖7所示。可見當傳感器輸出的脈沖信號發生較大幅度的偏移時,電路仍能輸出正常的脈沖信號,以確保曲軸轉速采集系統能夠采集到正確的轉速信號,提高了復雜環境下的抗干擾能力。
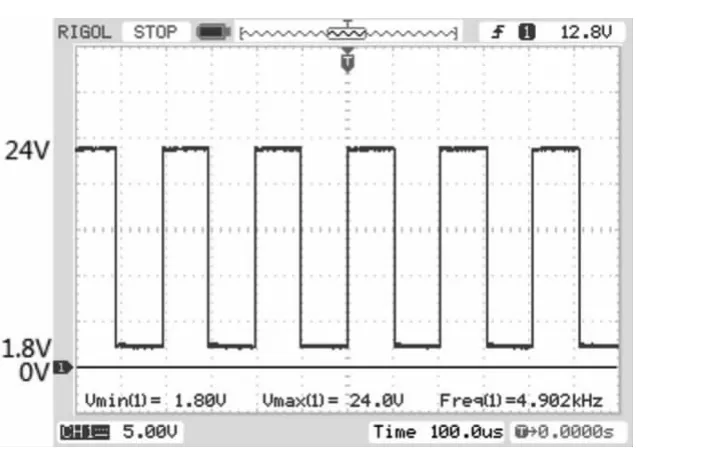
圖6 傳感器信號
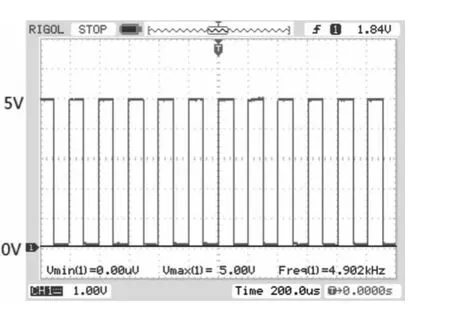
圖7 電路輸出波形
三、結論
針對霍爾型傳感器轉速信號調理電路進行了研究,通過采用電壓比較器電路和施密特反向觸發器電路串聯的方法,對傳感器輸出的脈沖信號進行整形,消除了由于阻抗不匹配所造成的傳感器輸出脈沖信號發生偏移的現象。為往復機械曲軸轉速測量系統提供了可靠的轉速信號。
1 于炳亮.電機轉速測量方法研究[J].山東科學,2005,05:41-42,51
2 劉小強,粟梅.基于CAN總線的數據采集處理系統的設計[J].儀表技術與傳感器,2006,09:22~24
3 葉菁.多功能轉速測量儀的研制[D].天津大學,2012
4 姚偉鵬,韓黨群.一種新型電機轉速測量方法的研究[J].電子元器件應用,2008,12:65~66
5 鄭哲,肖勇,葛曉宇,潘佩琦.基于光電傳感器的風輪轉速測定[J].測控技術,2013,07:38~40
6 趙世榮,黃向華,張天宏.基于嵌入式實時操作系統PICos18的多用途智能轉速表的研制[J].測控技術,2007,01:4~6
7 段禮祥,張來斌,王朝暉.往復機械故障診斷的現代方法及展望[J].石油機械,2004,11:66~69,77
8 赫偉英,裴峻峰.往復機械故障診斷技術進展綜述[J].化工機械,2010,05:671~674,678
9 王立勇,徐小力,趙二輝.基于相位檢測的往復機械故障診斷方法研究[A].中國振動工程學會故障診斷專業委員會.第十二屆全國設備故障診斷學術會議論文集[C].中國振動工程學會故障診斷專業委員會,2010:3
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
媽媽寶寶(2019年10期)2019-10-26 02:45:34
中國生殖健康(2019年3期)2019-02-01 06:12:26
鐵道通信信號(2018年11期)2019-01-19 01:15:08
電子制作(2018年11期)2018-08-04 03:25:42
鐵道通信信號(2018年2期)2018-04-18 12:18:10
鐵道通信信號(2016年11期)2016-06-01 12:11:32
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
中國病理生理雜志(2015年8期)2015-12-21 12:38:06
