雷達風矢產品性能對比分析
2014-01-05 05:53:46朱克云
成都信息工程大學學報 2014年1期
徐 鋮,朱克云,張 杰,明 靜
(1.成都信息工程學院大氣科學學院,高原大氣與環境四川省重點實驗室,四川 成都610225;2.成都軍區空軍氣象中心,四川成都610041)
0 引言
在對風的探測和研究中,幾十年來人們用了各種工具和各種方法,對于空中風的測量則主要采用的是探空氣球。然而,利用跟蹤氣球測風,不僅費用較高,而且不能進行長期觀測、時間分辨力低。
隨著多普勒天氣雷達在氣象應用上的進一步推廣和普及,氣象學者對速度產品的研究和應用有了極大的發展,其中速度-方位顯示(Velocity Azimuth Display,VAD)技術是在風場線性假設的條件下,從多普勒雷達觀測的景象風中估計水平風的一種簡單有效的方法。根據VAD技術得到不同時間各高度上的風向風速制作的垂直廓線圖(VWP)能解釋平均風矢量從低層到高層的演變現象,對分析流場的結構、分析風場在垂直方向上的厚度變化以及冷暖平流變化等非常有用。
風廓線雷達是一種新型探測設備,其時空分辨率超過任何高空風測量系統[1-2]。風廓線雷達根據多普勒效應,可以連續地觀測測站上空垂直風場信息。它除了具有可連續探測優點外,還能夠獲取高空風和低空急流活動特征,能夠提供高時空密度的氣象信息。
如今,世界很多國家都已用風廓線雷達組成業務運行網,廣泛應用于機場飛機起降、交通管制、氣象預報和大氣污染監測等方面[3]。
隨著中國氣象事業的發展和氣象保障工作要求的提高,各級氣象部門對風廓線雷達設備的需求也愈來愈迫切。中國也一直在開展風廓線雷達的研制及研究工作并取得一定進展[4-5],其中邊界層風廓線雷達和對流層風廓線雷達技術已成熟,并已廣泛應用于航空航天、水文水利、大氣監測和天氣預報等方面[9-10]。
目前關于多普勒天氣雷達的風廓線產品,日常研究則比較少,有關多普勒天氣雷達的風廓線產品和風廓線雷達風矢產品兩者的對比的文獻則幾乎沒有。風廓線產品對確定高低空急流、垂直風切變、冷暖平流、渦度等都有非常重要的幫助。因此,通過分析兩種雷達測風原理、風矢產品的性能對比以及各種天氣形勢下兩者的異同,為雷達風矢產品的應用提供一點思路。
1 風廓線雷達與多普勒天氣雷達風廓線產品的對比分析
1.1 VWP產品介紹
VWP即速度方位顯示風廓線。VWP產品的生成原理是用雷達每個體掃資料在不同高度上通過VAD技術得到該高度上的平均風的風向風速。通過把不同體掃和各個高度上的計算結果畫在同一張圖上,表示測站上空高空風的分布隨時間的變化,所以利用VWP產品可以直觀地了解高空風的變化。該產品主要應用于大氣邊界層氣象研究、大氣污染研究、人工影響天氣等方面。關于VWP產品的基本應用,我們可以總結得到幾點:(1)VWP可以較準確地反映各層槽線、切變線、地面鋒區過境情況。(2)VWP可以利用熱成風原理確定冷暖平流層次和大小,從而反映本站大氣層結穩定度變化情況。(3)VWP可以判斷本站上空高低空急流。
VWP產品對測站上空高空風的分布隨時間變化的探測,這是常規觀測手段所無法做到的。
1.2 風廓線雷達簡介
1.2.1 風廓線雷達探測原理
風廓線雷達(wind profiler radar/wind profiling radar/wind profiler)是一種新型的測風雷達,它以晴空大氣湍流對入射電磁波的散射回波為探測基礎,采用多普勒雷達收發技術體制,用同一高度上的5個波束指向的多普勒速度測量值聯合求解出大氣3維風場。
1.2.2 風廓線雷達風矢產品介紹
從原理上講,風廓線雷達能在所有天氣條件下測量風廓線。降雨會增強回波信號強度,有助于增大水平風測量的有效垂直高度。風廓線雷達的主要優點是能夠在無人值守狀態下工作,并且幾乎能在站址的正上方做連續的風測量。正是由于風廓線雷達具有精度和時空分辨率高、連續性和實時性好的特點,是其成為高空氣象探測的重要設備,是當前常規氣球探空體制的重要補充,是天氣預報和氣象保障的重要手段。
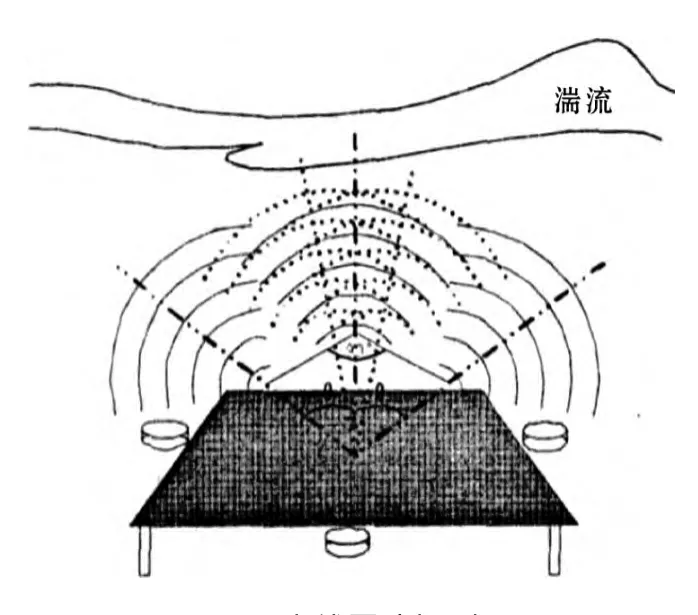
圖1 風廓線雷達探測原理
2 實際觀測個例中的對比分析
文中的數據分別來自于成都新一代C波段多普勒天氣雷達和愛爾達邊界層風廓線雷達,兩部雷達相距85m。多普勒天氣雷達資料中VWP的最大探測高度為12.6km,而邊界層風廓線雷達的最大探測高度為3.4km。因此,涉及到的兩種雷達產品只在3.4km以下有可對比性。故文中只對兩種雷達產品3.4km以下數據進行對比分析。
2.1 晴天個例對比分析
2010年5月5日,成都天氣為晴天。圖2(a)的數據來自于多普勒天氣雷達風廓線產品,圖2(b)的數據來自邊界層風廓線雷達。
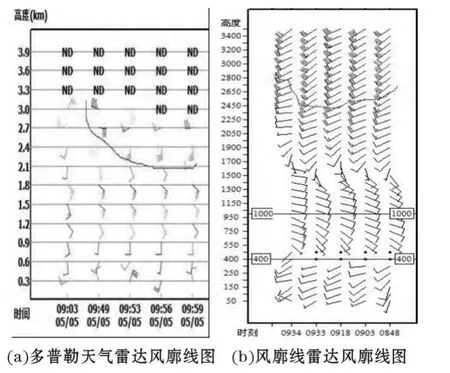
圖2 成都2010年5月5日09:03-09:40間的風矢圖
圖2(a)給出了多普勒天氣雷達風廓線產品在2010年5月5日9時03分至9時59分成都的各高度上的風速和風向廓線。圖2(b)為風廓線雷達在同一時間段上空各高度上的風速和風向廓線。多普勒天氣雷達風廓線圖中,0.5km至1.8km的風向和風速較為穩定,風向隨高度變化均為南風向上轉為東南風,風速略有遞增,與風廓線雷達風廓線圖較為一致。在離地面3km的風速和風向相對于風廓線雷達風廓線圖十分混亂且不穩定。
在該段時間內,都有低空急流出現。且從圖上看,低空急流有向下延伸的趨勢。而從風廓線雷達風廓線圖上看到,該低空急流隨時間有向上收縮的趨勢。
通過該個例,發現除了風廓線雷達無法表示晴天時大氣中的干區以外,兩者還存在一些區別:風廓線雷達得到的風向比多普勒天氣雷達風廓線產品得到的風向偏北;對于低空急流位置的確定,風廓線雷達得到的低空急流比多普勒天氣雷達VWP產品得到的低空急流范圍更加集中,這說明,在晴天狀態下,風廓線雷達探測低空風場更準確。
2.2 小降水天氣個例
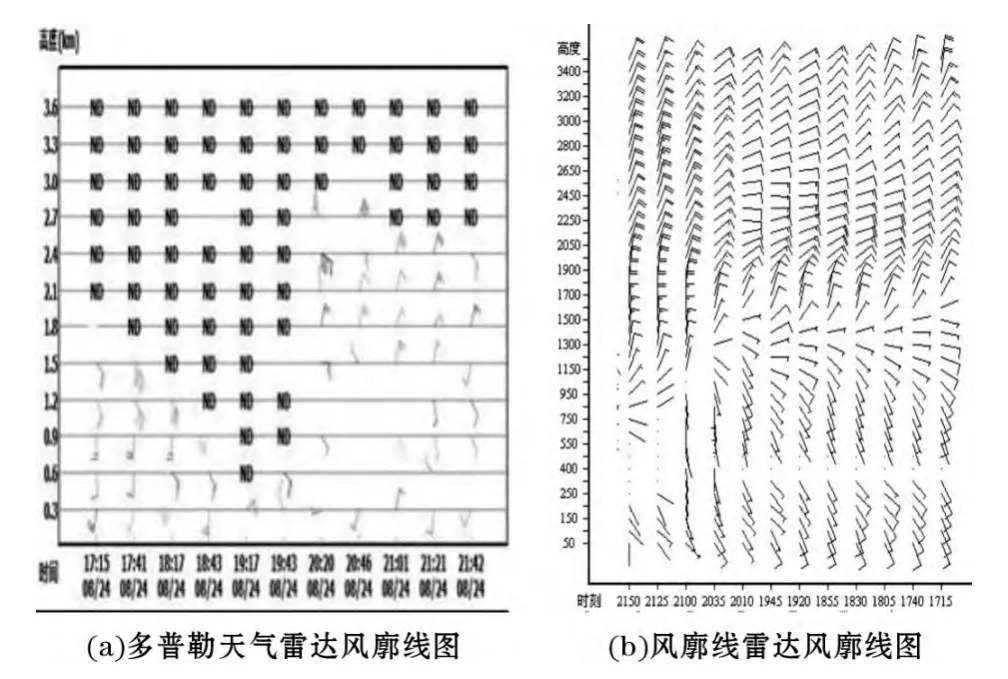
圖3 成都2010年8月24日17:15-21:45小雨天氣的風矢圖
2010年8月24日成都為小雨天氣。圖3(a)的數據來自于多普勒天氣雷達風廓線產品,圖3(b)的數據來自邊界層風廓線雷達。圖3(a)給出了多普勒天氣雷達風廓線產品在2010年8月24日17時15分至21時42分探測的各高度上的風速和風向廓線。圖3(b)顯示的是風廓線雷達在2010年8月24日17時15分至21時50分上空各高度上的風速和風向廓線。由該圖可以看到在此時間段內,多普勒雷達圖1km以下風向以偏南風為主,19時17分至19時43分0.6km以上均顯示“ND”(干區)。在1.5km以上,風向較為混亂,風速值也存在較大的變動。在風廓線雷達圖中,0.6km以下為穩定的東南氣流。隨著高度增加,風向逐漸呈逆時針旋轉,1.3km高度上風向為東風,隨高度往上轉為東北風,在3.4km高度上邊界層附近,轉為偏北風。
通過該個例發現:(1)多普勒天氣雷達VWP產品得到的風廓線圖可以根據其“ND”區厚度的變化來判斷降水前后大氣中的水汽含量,而風廓線雷達無法判斷。(2)在小降水的天氣狀況下,風廓線雷達得到的風廓線圖仍然比多普勒天氣雷達VWP產品得到的風廓線圖顯示的風向偏北。(3)小降水時,多普勒天氣雷達得到的近地層風速略大于風廓線雷達得到的近地層風速。(4)在濕度層很薄,僅有弱降水時,天氣雷達VWP數據精度不高。
2.3 大降水天氣個例
2010年8月18日成都天氣為雷雨、陣雨轉多云的天氣。圖4(a)的數據來自于多普勒天氣雷達風廓線產品,圖4(b)的數據來自邊界層風廓線雷達。

圖4 成都2010年8月18日雷雨、陣雨轉多云天氣的風矢圖
圖4(a)顯示的是多普勒天氣雷達在2010年8月18日07時55分至19時45分VWP圖。圖4(b)顯示的是風廓線雷達在2010年8月18日07時44分至11時57分上空各高度上的風速和風向廓線。從圖上可以看到,整個時間段內,風向隨高度成逆時針變化,風速較為穩定。風廓線雷達圖中風向較多普勒天氣雷達的風廓線圖稍混亂。
下面對兩個時刻的兩個風廓線圖進行比較:
(1)07時55分,此時天氣狀況為陣雨。在圖4(a)上,1.2 km高度以下風向為偏東氣流。1.5 km以上為偏南氣流。在圖4(b)上的同一時刻,0.2 km以下為東北風,0.2 km至0.5 km高度內為東南氣流,0.5km以上為偏南氣流。與多普勒天氣雷達的風廓線圖相比,風向比較相符,風速兩者有所不同,風廓線雷達的風廓線圖上風速比多普勒天氣雷達的風廓線圖上的風速快2~4 m/s。
(2)11時46分,該時刻沒有降水,為陰天。圖4(a)上,1.2 km高度以下風向為偏東氣流。1.5 km以上為偏南氣流。圖4(b)上的同一時刻,0.6 km以下為東北風。0.6 km至3.4 km高度內,風向由東南風順時針旋轉為南風。與多普勒天氣雷達的風廓線圖相比,兩者基本上相符合。
說明在大降水天氣下,兩者的風向基本一致,而風廓線雷達所得到的風速比多普勒天氣雷達得到的風速快2~4m/s。在大降水結束后,天氣狀況由陣雨轉為陰天時,兩者的風向和風速都基本吻合,可信度較高。
2.4 系統過境個例
2.4.1 小高壓過境個例
2010年8月17日成都為多云轉雷雨天氣。圖5(a)的數據來自于多普勒天氣雷達風廓線產品,圖5(b)的數據來自邊界層風廓線雷達。
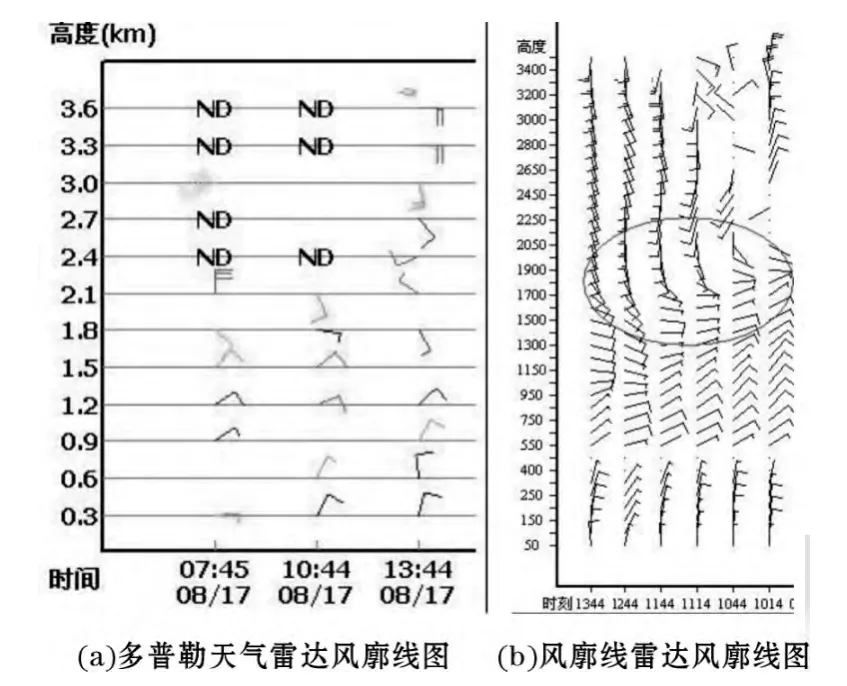
圖5 成都2010年8月17日多云轉雷雨天氣風矢圖
圖5(a)顯示的是多普勒天氣雷達在2010年8月17日07時45分至13時44分上空各高度上的風速和風向廓線。圖5(b)顯示的是風廓線雷達在2010年8月17日10時14分至13時44分上空各高度上的風速和風向廓線。可以看到,圖5<b>中,在1.3 km至2 km高度內可以發現,10時14分吹東北風,隨著時間的推移,風向逐漸順時針轉動,風向逐漸由東北風變為東風,再變到東南風。至12時44分時,已經是穩定的東南氣流。可以清楚地辨別出這里有一個高壓過境,這是一個小高壓從測站北側經過的過程。而圖5(a)中,系統過境的特征不明顯。由此我們可以發現當有小高壓過境時,風廓線雷達的風廓線圖上有明顯的特征,而多普勒天氣雷達VWP產品上無法清楚地辨別。
2.4.2 高空槽過境個例
2010年8月20日成都為多云天氣。圖6(a)的數據來自于多普勒天氣雷達風廓線產品,圖6(b)的數據來自邊界層風廓線雷達。
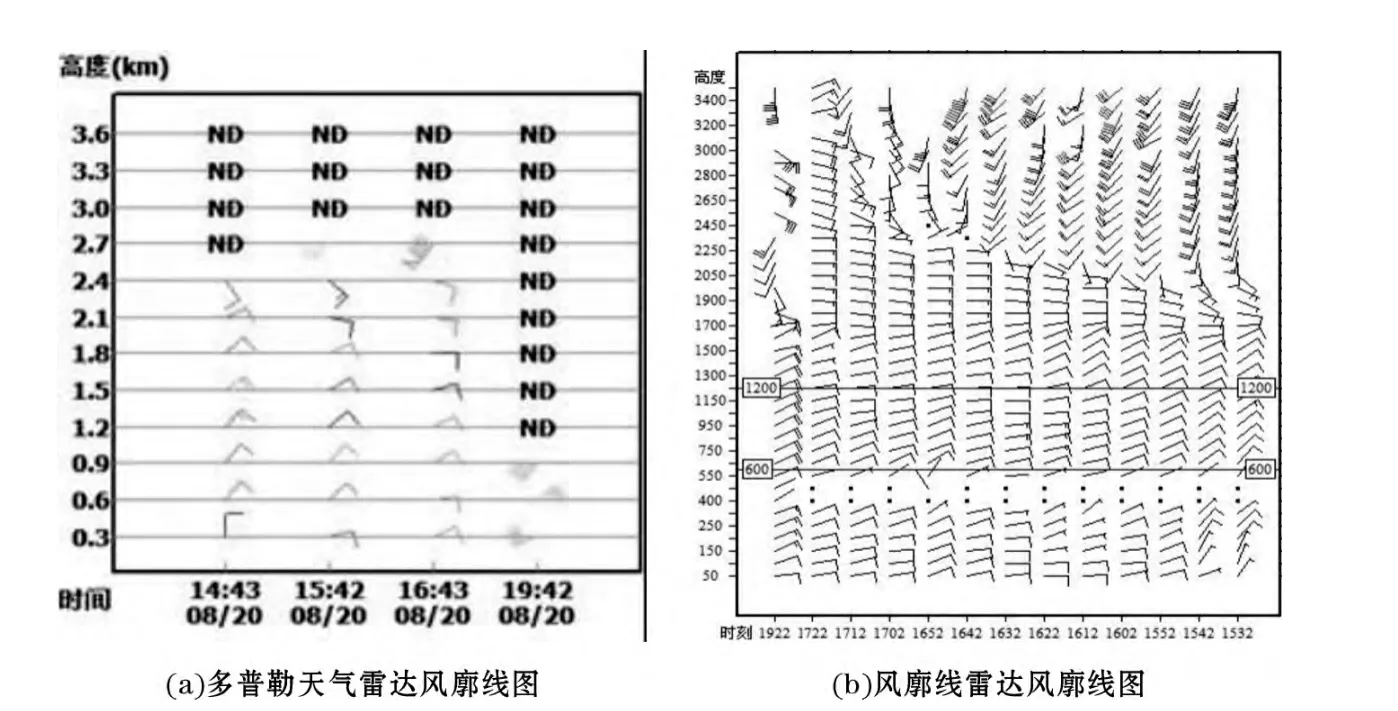
圖6 成都2010年8月20日多云天氣風矢圖
圖6(a)顯示的是多普勒天氣雷達在2010年8月20日09時44分至19時42分上空各高度上的風速和風向廓線。由圖上可以看出,從15時42分開始,在約2.4 km高度上發生了風切變,2.4 km以下吹東北風,2.4 km以上為西南風。由圖上看到,雖然存在風切變,但無明顯的高空槽過境的特征。
圖6(b)顯示的是風廓線雷達在2010年8月20日15時32分至19時22分上空各高度上的風速和風向廓線。由圖上可知,15時32分時,2 km高度以下為深厚的東北氣流,2 km以上風向發生切變,變為西南風速風,且風速隨高度增大。17時02分切變消失,風向隨高度順時針轉動,在2 km以上由東風轉變為東南風最后轉為南風,說明此時高空槽已經過境。
對高空槽過境時兩種雷達資料進行對比分析,風廓線雷達的風廓線圖與多普勒雷達的風廓線圖所顯示的風向以及發生切變的位置和時間都大致相同,但兩者所顯示的風速卻相差很大,多普勒天氣雷達測得的風速比風廓線雷達測得的風速快2~4 m/s。相比之下,高空槽過境時在多普勒天氣雷達的風廓線圖上的特征不如在風廓線雷達的風廓線圖上明顯。
3 結論
選取了5個實例來對風廓線雷達和多普勒天氣雷達風廓線產品進行對比分析,分別對比了兩者在晴天、小降水、大降水以及小高壓和高空槽過境情況下的異同點。綜上所述,可以得出以下結論:
(1)天氣狀況為晴天時,兩種雷達風矢產品的風速一致,風廓線雷達所測風向在南北方向上偏北。對于低空急流位置的確定,風廓線雷達得到的低空急流范圍更加集中。
(2)若有小降水時,兩種雷達風矢產品所顯示的地面風向相似度很高,風速有所差別:對于空中風,風廓線雷達得到的風廓線圖風速、風向都比較混亂,尤其在接近邊界層,兩者的風速和風向差別都比較大。
(3)在大降水天氣下,兩者的風向基本一致,風廓線雷達所得到的風速比多普勒天氣雷達得到的風速快2~4 m/s。天氣狀況由降水轉為陰天時,兩者的風向和風速都基本吻合,可信度較高。
(4)當有系統過境時,風廓線雷達所得產品表現的更為明顯,而多普勒雷達則不夠清楚。
[1] NOAA風廓線網站:http://www.profiler.noaa.gov.
[2] 張靄琛.現代氣象觀測[M].北京:北京大學出版社,2002:289-299.
[3] 孫憲章.大氣遙感探測系統——風廓線雷達[J].現代雷達,1994,4(2):21-30.
[4] 呂達仁,王普才,邱金恒,等.大氣遙感與衛星氣象學研究的進展與回顧[J].大氣科學,2003,27(4):552-566.
[5] 張勝軍,徐祥德,吳慶梅,等.“中國登陸臺風外場科學試驗”風廓線儀探測資料在四維同化中的初步應用研究[J].應用氣象學報,2004,15(增刊):101-108.
[6] 馬大安,田文斌,丁渭興,等.對流層風廓線雷達的研制[R].京津冀中尺度氣象試驗基地文集[C].中國氣象科學研究院中尺度氣象研究所,1989.
[7] 顧映欣,陶祖鈺.1989—1990年UHF風廓線雷達資料的分析和應用[R].中尺度氣象文集[C].北京:氣象出版社,1993.194-201.
[8] 陳少應,王凡.風廓線雷達測量精度分析[J].現代雷達,2000,10(5):11-17.
[9] 阮征,葛潤生,吳志根.風廓線儀探測降水云體結構方法的研究[J].應用氣象學報,2001,13(3):330-338.
[10] Atlas D.Radar in meteorology[J].American Meteorological Society,1990:180-220.
猜你喜歡
現代裝飾(2022年4期)2022-08-31 01:39:32
現代裝飾(2022年3期)2022-07-05 05:55:06
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
西南交通大學學報(2016年4期)2016-06-15 20:29:37
Coco薇(2015年1期)2015-08-13 02:23:50
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15
電網與清潔能源(2015年3期)2015-02-28 16:03:31
玩具(2009年10期)2009-11-04 02:33:14