雙三相永磁同步電動機交互磁飽和模型仿真研究
2014-01-31 09:02:24何新薈辛小南
微特電機 2014年4期
關鍵詞:模型
何新薈,辛小南,齊 歌
(鄭州大學,河南鄭州450001)
0 引 言
與傳統三相永磁同步電動機相比,雙三相永磁同步電動機具有以下優點:用低壓器件實現大功率輸出、減少空間諧波磁勢、減少噪聲、提高效率、實現可靠性冗余運行[1]。目前研究較多的雙三相電機,兩套繞組呈30°夾角。但在這種連接方式下,兩套繞組之間存在耦合,對電機的控制性能會產生不利影響。為消除耦合的不利因素,本文采用兩套繞組呈180°夾角的雙三相電機[2]。同時,通常所采用的基于派克變換的d,q軸等效電路模型認為磁路是線性的,即模型中的電感值為常量[1],從而忽略了電機帶負載時磁場飽和的影響。而實際上,由于磁滯影響,d,q軸均存在磁場飽和現象,兩軸之間還存在交互磁飽和,所以這種不考慮飽和的電機模型是不夠精確的。為改進這種模型,考慮交互磁飽和影響,本文利用MATLAB/Simulink搭建了基于內插外推法的飽和模型,并用仿真實驗來驗證飽和模型的有效性。
1 考慮交互磁飽和電機模型
對于兩套繞組呈180°夾角的雙三相電機,兩套繞組的空間排列關系如圖1所示。采用此繞組分布,可以有效削弱各個相繞組之間的相互影響,增大相繞組自感,減小相繞組之間的互感,尤其是兩套三相繞組之間的互感,有利于雙三相電機的解耦控制[2]。
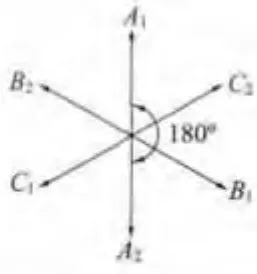
圖1 雙三相永磁同步電動機定子繞組分布
建立在六相靜止坐標系上的數學模型復雜,不利于分析。為簡化電機模型,利用轉換矩陣T[3-4],得到兩相靜止α-β坐標系下的數學模型,然后通過派克變換,得到兩相旋轉d-q坐標系下的數學模型。
將電機模型從六相靜止坐標系轉換到α-β坐標系的轉換矩陣T為:

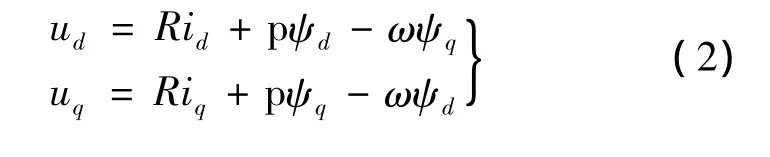
d-q坐標系下電壓及磁鏈方程如下:
電磁轉矩及運動方程如下:
式中:ud,uq為d,q軸定子電壓分量;R為定子電阻;id,iq為 d,q軸電流分量;ψd,ψq為 d,q 軸磁鏈分量;Ld,Lq為 d,q軸電感分量;ψf為永磁體磁鏈;為微分算子;p為極對數;TL為負載轉矩;J為轉動慣量;ω為機械角速度。
1.1 d,q 軸交互磁飽和
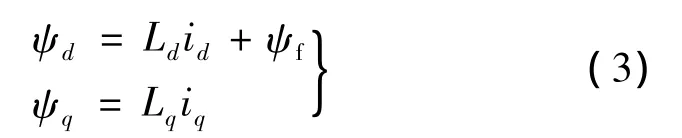
考慮交互磁飽和法,是在磁鏈法的基礎上,考慮了id,iq對 Ld,Lq的交互影響。故 ψd不僅與 id有關,還受到iq的影響;ψq也同時受到 id,iq的影響。此時磁鏈方程:

將式(6)代入式(2)、式(4)中,得考慮磁飽和的電壓方程及電磁轉矩方程:
為分析 id,iq對 Ld,Lq的交互影響,文獻[2]利用有限元法得到的Ld,Lq與id,iq的非線性關系,如圖2所示。
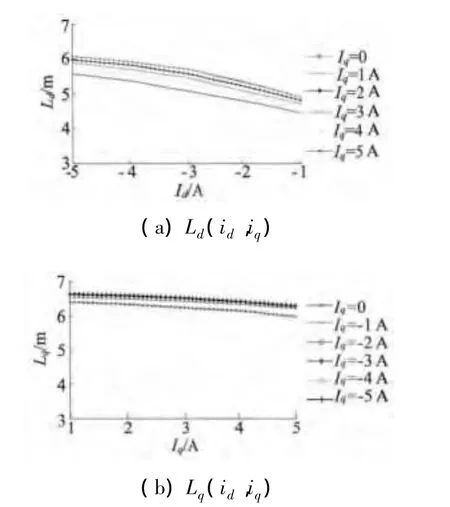
圖2 d,q軸電感
電機空載時,輸入功率全部轉化為電機內部損耗;穩態運行時,電機內部損耗基本不變,故Ld,Lq可近似為常值。當電機負載逐步增大時,輸入功率包含電機內部損耗和輸出功率,由圖可知,id負向增加,去磁作用明顯,磁路飽和程度下降,磁導率變大,故Ld增大。考慮交互磁飽和的影響,iq的增加使得d軸磁路飽和程度稍有增加,故Ld有所下降。同時,Lq隨著iq的變化不明顯,iq增加,Lq略有減小;考慮交互磁飽和的影響,id的負向增加,使得q軸磁路受到影響,飽和程度下降,故Lq隨著id負向增加而增大。
1.2 考慮交互磁飽和仿真模型
為反映圖2中d,q軸交互磁飽和,利用MATLAB/Simulink建立雙三相永磁同步電動機的仿真模型,如圖3所示。模型輸入為滿足圖1相角關系的雙三相電壓、負載轉矩TL和永磁體磁鏈ψf,輸出為雙三相定子電流、電磁轉矩Te和轉速n。
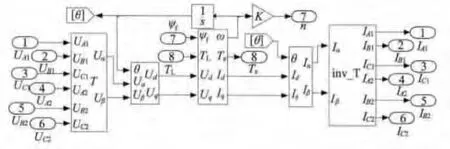
圖3 雙三相永磁同步電動機仿真模型
根據式(6)、式(7),可得d-q坐標系下電機磁鏈和電壓模塊,模塊中id,iq的計算需要使用Ld,Lq的值,而電機的電機參數Ld,Lq與電機的運行狀態有關:當電機空載時,Ld,Lq值是常量;當電機帶負載運行時,由于磁飽和影響,Ld,Lq由電流 id,iq決定(見圖2)。本文采用Switch模塊以TL為條件來實現這種轉換:當 TL=0 時,Ld=C1,Lq=C2,C1,C2為常量;當 TL>0 時,Ld=Ld1,Lq=Lq1,而 Ld1,Lq1為滿足圖2 的函數:Ld1=f1(id,iq),Lq1=f2(id,iq)。
由于d,q軸電感與電流呈非線性關系,難以寫出由 id,iq求解 Ld1,Lq1的解析式 f1,f2。而內插外推法[5]可以通過已觀測點數據來估算區域內或區域外未觀測點的數據,且效率高、估值準確。為計算Ld1,Lq1的值,本文利用 MATLAB/Simulink中 Lookup Table(2-D)模塊,采用兩變量的內插外推法建立了 Ld1,Lq1的計算模塊。
2 仿真驗證
為驗證考慮交互磁飽和仿真模型的有效性,將其與不考慮飽和的電機模型在MATLAB/Simulink環境下進行仿真比較。雙三相繞組均采用Y接法,主要仿真參數:額定電流5 A,額定電壓36 V,額定轉速400 r/min,Ld=4.940 3 mH,Lq=6.400 5 mH,p=5,J=0.001 kg·m2,ψf=0.150 37 Wb,TN=5.5 N·m,R=0.419 Ω。
圖4分別表示雙三相永磁同步電動機不飽和、飽和模型定子電流d,q軸分量在負載轉矩TL躍變時的變化曲線,圖中虛線表示不飽和模型的id_unsat、iq_unsat,實線表示飽和模型的 id_sat,iq_sat。t=0.3 s 時,TL從0躍變為5.5 N·m。此時,定子電流d軸分量負向增大。對于飽和模型,考慮到交互磁飽和作用,d軸去磁作用明顯,磁場飽和程度降低,故飽和模型的id_sat絕對值明顯小于不飽和模型的id_unsat的絕對值。同時,定子電流q軸分量增大,由于受到d軸電流的影響,故飽和模型的iq_sat與不飽和模型的iq_unsat相比,增大不明顯。
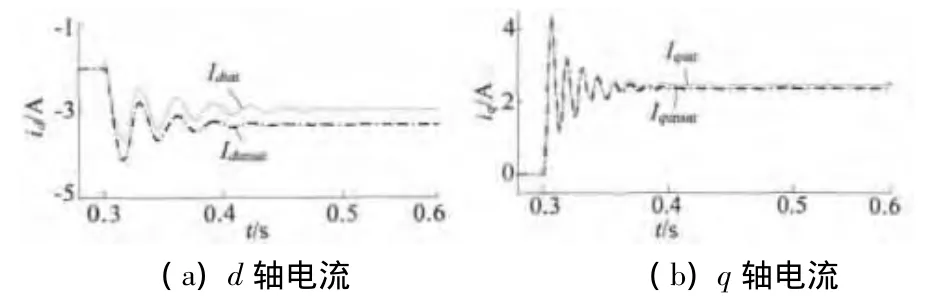
圖4 定子d,q軸電流分量
圖5為負載轉矩躍變時,飽和電機模型的仿真結果。t=0 s時,電機空載,經過0.14 s短時波動達到穩定運行狀態,定子電流幅值為2.04 A,電磁轉矩為0,轉速為額定轉速400 r/min。t=0.3 s時,負載轉矩躍變為5.5 N·m,經過0.14 s短暫波動,定子電流幅值穩定在3.825 A,電磁轉矩達到額定負載轉矩,轉速恢復為額定轉速。
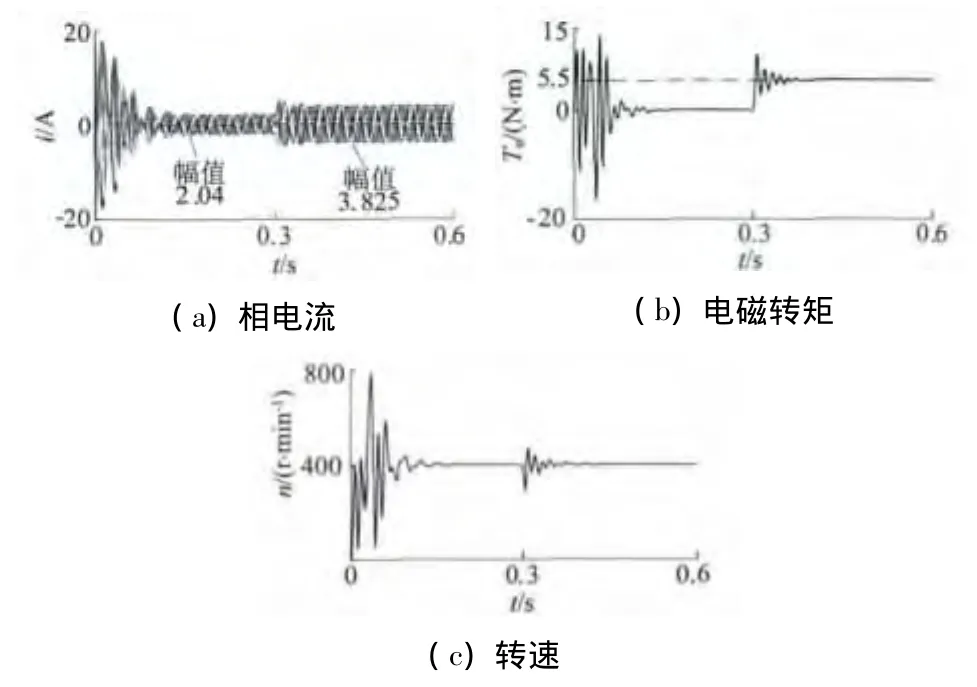
圖5 電機飽和模型相電流、電磁轉矩和轉速
3 結 語
本文通過有限元分析獲得電機d,q軸電感與電流的非線性關系,分析了雙三相永磁同步電動機d,q軸交互磁飽和的機理。考慮交互磁飽和仿真模型,能夠準確反映雙三相永磁同步電動機磁路飽和狀態下的運行特性,彌補了不飽和模型的不足。本文所采用的建模方法簡單直觀,同樣適用于其他非線性模型的建立。
[1]李崇堅.交流同步電機調速系統[M].北京:科學出版社,2006.
[2]齊歌.雙三相永磁同步電動機交互飽和模型與特性研究[D].武漢:華中科技大學,2010.
[3]黃進.p對極n相對稱系統的變換理論[J].電工技術學報,1995,(1):53-57.
[4]ZHAO Yifan,LIPO T A.Space vector PWM control of dual three-phase induction machine using vector space decomposition[J].IEEE Transactions on industry applications,1995,31(5):1100-1109.
[5]熊鄴,方大綱,劉鐵軍.電磁場數值計算中的內插和外推[J].電波科學學報,2002,17(4):325-329.
[6]楊金波.雙三相永磁同步電機驅動技術研究[D].哈爾濱:哈爾濱工業大學,2011.
[7]李景燦,廖勇.考慮飽和及轉子磁場諧波的永磁同步電機模型[J].中國電機工程學報,2011,31(3):60-66.
[8]景巍,譚國俊,葉宗彬.考慮磁場飽和效應的凸極同步電動機建模[J].電機與控制學報,2010,14(10):94-99.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
網絡安全與數據管理(2022年1期)2022-08-29 03:15:20
導航定位學報(2022年4期)2022-08-15 08:27:00
中學生數理化·中考版(2022年8期)2022-06-14 06:55:24
新世紀智能(數學備考)(2021年9期)2021-11-24 01:14:36
成都醫學院學報(2021年2期)2021-07-19 08:35:14
新世紀智能(數學備考)(2020年9期)2021-01-04 00:25:14
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19