基于VRS 技術的高差測量精度的研究*
2014-02-13 05:43:58張紅娟侯海倩
大地測量與地球動力學 2014年1期
張紅娟 侯海倩 張 超
1)中國地質大學長城學院測繪教研室,保定 071000
2)中國礦業大學地球科學與測繪工程學院,北京 100083
3)中國地質大學地球科學與資源學院,北京100083
1 引言
近年來,網絡RTK 測量技術快速發展,用戶使用時無需建立基準站,只需在流動站處架設接收機即可實現厘米級的實時定位,目前應用廣泛的實現算法是VRS 技術。與傳統RTK 相比,網絡RTK 具有服務范圍廣、定位精度高、可靠性強和可用性高等特點[1],特別是其服務范圍內定位精度均勻的特點使其成為GNSS 的研究熱點之一[2]。
然而,VRS 技術的定位精度為2 ~3 cm[3],限制了VRS 技術在高程精度要求較高的工程中的應用。但某些特定工程關心的是兩監測點間的高差,如果對相距不太遠的兩點進行同步觀測,通過觀測結果求差的方法減弱兩站的公共誤差,從而提高大地高高差的監測精度,這樣就為應用VRS 技術進行煤礦開采沉陷監測等工作提供了可能。
2 VRS 技術定位原理
通常,一個完整的VRS 系統由參考站、數據處理中心、用戶和數據通訊四部分組成。參考站采用連續觀測的方式采集衛星觀測數據并實時地傳輸到數據處理中心。通過單點定位,用戶流動站首先將自己的概略坐標發送給數據處理中心。數據處理中心根據流動站的概略坐標選擇附近幾個條件好的參考站,然后在概略坐標位置處生成一個虛擬參考站,并對該位置處的電離層延遲、對流層延遲等空間距離相關誤差進行建模并生成虛擬參考站的虛擬觀測值或其改正數信息,將其發送給流動站。流動站結合自身的觀測值實現高精度實時定位(圖1)。
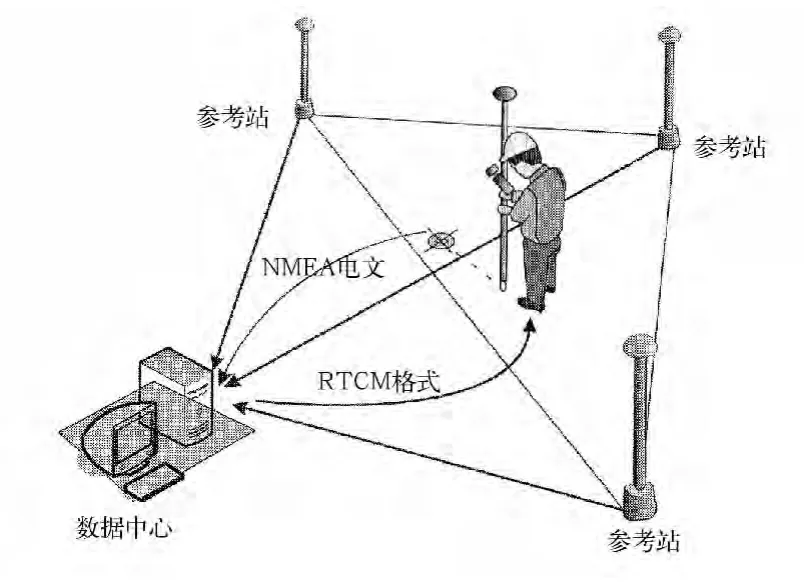
圖1 VRS 技術工作原理圖Fig.1 Functional diagram of VRS technique
3 VRS 技術下同步觀測高差精度分析
3.1 軌道誤差對高差的影響
文獻[5]提出了一種適用于區域參考站網絡的VRS 精密軌道實時改正數生成法,并將其命名為“VRS 軌道改正法”。它是基于廣播星歷(brd)和IGS 發布的精密預報星歷(igu),直接計算流動站與參考站間的雙差軌道改正數,然后將改正數發送給用戶,實現用戶位置軌道誤差的精確改正。研究表明,與現有常規內插方法相比,該方法具有更高的軌道誤差改正精度,使軌道誤差對100 km 以內的網絡RTK 定位精度的影響為亞毫米級。由上可知,對于VRS 技術下的相近的兩點進行同步觀測,軌道誤差對高差的影響可以忽略不計。
3.2 大氣折射對高差測量精度的定量分析
在影響GNSS 定位的各種誤差中,電離層誤差是最主要的誤差。借鑒近十年關于電離層延遲內插改正方法的研究成果[5],選擇坐標線性內插法(LIM算法)對VRS 技術實現兩相近點(<3 km)同步觀測,電離層延遲對高差的影響進行定量分析。
實際觀測中,在相近的兩點u1和u2進行同步觀測,數據處理中心接收到兩點的概略坐標后選擇兩點周圍三個最優的參考站A、B、C 構成VRS 定位參考站網絡。假設用戶流動站距離參考站A 較近,故選擇A 為主參考站,B、C 為輔助參考站,并假設它是等邊三角形,取基線長L=70 km(圖2)。各參考站的坐標為,用戶流動站u1和u2的坐標分別(xu1,yu1)和(xu2,yu2),它們之間的距離為

使用LIM 算法對兩個用戶流動站處的雙差電離層延遲改正進行內插,即:

式中,Δ▽IAU為用戶接收機與主參考站的雙差電離層延遲,Δ▽IAB、Δ▽IAC為各輔助參考站與主參考站的雙差電離層延遲。
將用戶流動站和各參考站的坐標代入可得

為研究方便假設A、B 和A、C 間的雙差電離層延遲大小相等,即Δ▽IAB=Δ▽IAC=Δ▽I,式(4)可簡化為
2016年的田間試驗在肇慶市高要區金渡鎮沖口村進行,試驗地常年種植蔬菜,土壤為河流沖積土,肥力較好,有機質含量2.87%,pH值5.9,灌溉條施件好,歷年黃瓜灰霉病發生較重;2017年的田間試驗在肇慶市高要區蜆崗鎮富佛村進行,試驗地常年種植蔬菜,土壤為河流沖積土,肥力較好,有機質含量2.82%,pH值5.8,灌溉條施件好,歷年黃瓜灰霉病發生較重。

圖2 坐標內插法模擬定位圖Fig.2 Simulation positioning chart of coordinate interpolation method

電離層對兩用戶流動站影響的差值為

由于

所以電離層延遲對兩用戶流動站影響的差異為

參考站間雙差電離層延遲是通過連續運行的參考站觀測數據通過雙頻計算方法得到的。由VRS技術誤差分析可知,電離層延遲受到多種因素影響,根據文獻[5]的研究結果,取Δ▽I=0.1 m,并把L=70 km,d=3 km 代入式(8)得

在同步觀測的條件下,電離層延遲對相近點間基線的影響的殘余誤差小于6 mm,基線可以表示為水平分量和垂直分量的矢量和,假設水平分量和垂直分量大小相等,那么垂直分量為σh<4.2 mm,由此計算的每千米高差中誤差為

由此可以得出以下推論:
1)應用VRS 技術,同步觀測的兩用戶流動站受到的電離層延遲影響的差異與兩測站的距離成正比,隨著兩測站間距離d 的增大,電離層延遲改正數的差異也會增大;
2)當兩點相距很近(<3 km)時,電離層延遲對兩測站的影響近似相等,可采用同步觀測、觀測結果求差來消除兩站的公共誤差,從而提高高差的測量精度。
傳統GPS 相對定位中,對流層延遲的影響與電離層對定位精度的影響相當,均為1 ~2 ppm,可以推知對流層延遲對高差的影響與電離層延遲對高差的影響相當。在忽略多路徑效應和觀測噪聲的影響的情況下,同步觀測時兩點間每公里高差中誤差為

3.3 多路徑效應對高差的影響
由于多路徑效應在基線兩端不具有相關性[6],也無法通過差分技術消除或減弱其影響。現有方法和措施在靜態數據處理中取得了較好的效果,對動態變形監測中消除或減弱多路徑誤差的研究還很不足。黃聲享等人[7]提出了多路徑誤差具有周日重復的特性,因為在兩萬公里高空的衛星,相對于地球的運動是有規律的,它們繞地球一周的時間為12 恒星時(11h58min),所以,對于地面觀測者來說,每天將提前4 分鐘在同一位置見到同一顆衛星。
根據衛星位置的確定性和觀測點位置的確定性,如果每期觀測時固定衛星的空間位置,接收機接收相同衛星的高度角每期相同,由此各期產生的多路徑誤差近似相等,對高程的影響也近似相等。這樣,通過同步觀測,觀測結果求差得到的高差中含有相同的多路徑效應的影響,即可將其轉化成了各期高差均含有的系統誤差。當用各期高差之差作為工程觀測量依據時,就可以消除多路徑效應對高差之差的影響。
4 試驗數據處理與精度評定
4.1 試驗數據采集
試驗基于河北省衛星定位綜合服務系統(SWEPOS-HEBEI),該系統目前共有34 個連續運行參考站,平均點間距為70 km,可提供CGCS2000 基準下的定位成果。由于條件限制只布設a、b 兩點,相距2.53 km。a、b 兩點地勢較高,視野開闊,能夠同時接收到8 ~12 顆衛星信號;GPRS 通信信號良好,能接收到良好的CORS 系統的內插改正信息。
實驗中使用腳架安置接收機,采用準動態測量形式在a、b 兩點上以1 秒采樣率采集5 個有效觀測歷元,每一分鐘進行一次測量并存儲測量結果,觀測6 分鐘得6 個大地高數據。連續觀測六天,采用定人、定儀器、定時的作業方法,第二天觀測時間比前一天提前4 分鐘。
4.2 試驗結果分析
數據處理使用TTC 數據處理軟件,測量結束后立即將手簿中的.dc 文件以.CSV 格式導出以便查看點位坐標信息。設a 點、b 點以每天6 次采集的大地高數據取平均值作為當天該點最終大地高成果,分別為Ha,Hb;每天各點采集一組數據計算的高程標準差(內部符合精度),分別為ma、mb;計算每天各點間大地高高差結果為Hb-Ha,見表1。
計算a、b 高差觀測值中

按

計算a、b 每千米高差。
中誤差試驗數據見表1。

表1 每天大地高高程、高程標準差、點間大地高差Tab.1 Everyday observed data of geodetic elevation,standard deviation of every point’s height and elevation difference of point to point
由表1 可知:
1)a、b 兩點在6 個周期觀測中,高程的波動相關性很好,設計原理(同步、定時等)和相應措施達到了預期目的;
2)各點各周期VRS 高程內部符合精度為1.7~11.4 mm,符合目前VRS 技術的定位精度;
3)a、b 兩點間高差值6天數據離散很小,由公式(13)計算的每千米高差中誤差3.2 mm≤5 mm,完全滿足四等水準測量要求,同時驗證了理論公式推導的正確性。
5 結束語
雖然VRS 技術測定點位的精度目前只能達到厘米級,然而對于相距不太遠的兩點進行同步觀測,通過觀測結果求差的方法能夠有效消除兩點間公共誤差,根據多路徑效應的周日特性以及其它系統誤差的特點,采用定時、定儀器、定人的觀測措施可以達到固化誤差的目的,從而提高了高差的觀測精度,從而為VRS 技術實現毫米級高差觀測精度成為可能。文中通過理論分析、公式推導給出了證明,通過算例進行了初步驗證,由于研究水平和客觀條件的限制,文中存在一些不足之處,如VRS 技術實現毫米級精度高差觀測的兩個點間的最大距離能達到多少千米;不同時間段的同步觀測,高差精度有何變化等問題函待解決,需進一步試驗。
1 高星偉,陳銳志,趙春梅.網絡RTK 算法研究與實驗[J].武漢大學學報(信息科學版),2009,34(11):1 350-1 353.(Gao Xingwei,Chen Ruizhi and Zhao Chunmei.A network RTK algorithm and test[J].Geomatics and Information Science of Wuhan Uniwersity,2009,34(11):1 350-1 353)
2 中國科學技術協會.2009—2010 測繪科學與技術學科發展報告[M].北京:中國科學技術出版社,2010.(China Association for Science and Technology.2009—2010 report on advance of science and technology in surveying & mapping[M].Beijing:Chinese Science and Technique Press,2010)
3 劉彥芳.VRS 技術的改正信息生成算法及定位精度研究[D].河北理工大學,2010.(Liu Yanfang.Study on generation algorithms of differential corrections and position accuracy for virtual reference station technique[D].Hebei Polytechnic University,2010)
4 楊洋.虛擬參考站(VRS)技術及其精度評定[D].西南交通 大 學,2007.(Yang Yang.Vitural Reference Station(VRS)technique and evaluation of accuracy[D].Southwest Jiaotong University,2007)
5 李成剛.網絡GPS/VRS 系統高精度差分改正數信息生成與發布研究[D].西南交通大學,2007.(Li Chenggang.Generating and releasing technique of precise differential corrections for GPS/VRS network[D].Southwest Jiaotong University,2007)
6 戴吾姣,丁曉利,朱建軍.GPS 動態變形測量中的多路徑效應特征研究[J].大地測量與地球動力學,2008,(1):65-70.(Dai Wujiao,Ding Xiaoli and Zhu Jianjun.Study on multipath effect in structure health monitoring using GPS[J].Journal of Geodesy and Geodynamics,2008,(1):65-70)
7 Georgiadou Y and Kleusberg A.On carrier signal multi-path effects in relative GPS positioning[J].Manuscripta Geodaetica,1998,(13):172-179.
猜你喜歡
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
商用汽車(2016年11期)2016-12-19 01:20:16
商用汽車(2016年6期)2016-06-29 09:18:54
商用汽車(2016年4期)2016-05-09 01:23:12
當代化工研究(2016年9期)2016-03-20 16:22:13
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
創業家(2015年10期)2015-02-27 07:55:08
創業家(2015年10期)2015-02-27 07:54:39
創業家(2015年5期)2015-02-27 07:53:25
