長江航道物聯網構建方案初步研究
2014-02-18 20:56:46林海
中國水運 2014年1期
關鍵詞:物聯網
林海

摘 要:為提升“數字航道”通信網絡的穩定性,提出長江航道物聯網的構建初步方案。分析了當前存在的問題,以航標、水位站為載體,安裝無線接入點和無線客戶端設備,形成網絡節點,組建航道物聯網網絡層。對長江下游航道航標間距和離岸距離進行了統計分析,滿足無線傳輸的距離要求。最后,給出了航道物聯網的邏輯結構圖,以保障“數字航道”通信鏈路的暢通和穩定。
關鍵詞:數字航道 物聯網 網絡結構
現狀分析
“十二五”期間,我國將繼續充分發揮長江三角洲內河航運優勢,以高等級航道網和主要內河港口為基礎,連接沿海主要港口和貨源地,建設現代化的水運交通管理和服務體系。為保障船舶及貨物的安全、可靠、高效運輸,就必須建立全方位覆蓋、全天候運行、具備快速反應能力的航道保障體系,在航標、橋梁等航道要素識別和管理中引入遙測遙控終端以及各種傳感器,為構建航道物聯網的感知層奠定基礎。
近期,交通運輸部、長江航務、長江航道等管理部門明確提出要加快科技進步,努力實現我國內河航運事業的新跨越,提高航道建設的現代化、信息化水平,保障長江航運暢通、高效、平安。在內河航道管理和服務模式上必須堅持科技創新,使長江航道標準化、網絡化、智能化,才能促進內河航運業的改革和發展。
內河航道物聯網的概念
國際電信聯盟(ITU)發布的ITU互聯網報告,對物聯網做了如下定義:通過二維碼識讀設備、射頻識別(RFID)裝置、紅外感應器、全球定位系統和激光掃描器等信息傳感設備,按約定的協議,把任何物品與互聯網相連接,進行信息交換和通信,以實現智能化識別、定位、跟蹤、監控和管理的一種網絡。
物聯網通過智能感知、識別技術與普適計算、泛在網絡的融合應用,被稱為繼計算機、互聯網之后世界信息產業發展的第三次浪潮。物聯網架構可分為三層:感知層、網絡層和應用層。
航道感知層由各種傳感器構成。在航道維護和管理中除了使用航標RTU、水位RTU、視頻傳感器外,還可應用流速、流量傳感器結合水深信息進行水情變化分析,準確掌握汛期和枯水期的航道信息,為船舶航行安全提供支持;對橋梁和橋墩采用光纖應力傳感器來感受橋梁結構的變化、橋墩被沖刷和侵蝕程度等;對航道霧情和氣象信息的采集使用霧情傳感器、氣象傳感器來測量風速、風向、液態降水、氣壓、溫度、以及相對濕度等信息;航道的船舶流量、載重信息也可通過架設在河岸或埋設在航道的傳感器進行采集;還有一種傳感器(通過探地雷達迅速測量水深和淤積層厚度)能探測河道淤積情況,一旦超標,就會發出警報,通知航道部門及時清淤,并為河床演變分析提供數據。此外,采用一些海洋傳感器可以探測水質污染和變化情況。
網絡層由各種網絡,包括互聯網、廣電網、網絡管理系統和云計算平臺等組成,是整個物聯網的中樞,負責傳遞和處理感知層獲取的信息。在“數字航道”的基礎上,針對內河航道的特點,構建航道物聯網網絡層是本文的研究重點。
應用層是物聯網和用戶的接口,它與航道維護、管理的實際需求相結合,實現數字航道的智能應用。
當前“數字航道”網絡存在的主要問題
1、遙測遙控終端與中心的通訊問題
目前南京航道局的遙測遙控系統(處系統)與航標RTU、水位RTU的通訊借助于移動通訊公網GPRS/SMS,如果數據和指令的傳輸在無信號或信號弱的河段中,就會出現了監控“盲區”;此外,如果RTU的SIM卡欠費,也會造成通訊中斷,所以RTU通訊的穩定性和可靠性得不到保障。
2、船端系統訪問中心數據庫的問題
目前,南京航道局數字航道工程建設的系統為三級管理運行模式,分為局系統、處系統和船端系統。航標工作船的船端“航標遙測遙控系統”通過APV網絡訪問處航標動態數據庫,獲取航標RTU的動態信息。受GPRS帶寬限制和某些區域信號弱的影響,訪問速度非常緩慢。在整個三級管理模式中,船系統作為生產第一線的應用受到了限制。
長江南京以下依托南瀏段數字航道工程共建設了19個水位遙測遙控站,每個水位站通過RTU每隔5分鐘向中心數據庫發送1次水位信息,工作船和測量船通過APN網絡從中心數據庫獲取水位信息,和獲取航標動態一樣,因受網速和帶寬的限制,船端很難獲得及時水位信息,這對航道測量和維護造成了不便。
為解決上述問題,在長江航道建立不依賴任何通信公網,沒有地域限制、沒有通訊費的穩定無線傳輸網絡是非常必要而且具有實際意義的。
解決方案
與通常的網絡線纜(銅纜和光纖)相比,無線傳輸技術使用的是無線電波。一般情況下,根據應用的不同,按照傳輸距離的大小通常采用的無線網絡有藍牙、WIFI、GSM和GPRS/3G等。但這些網絡都不適合內河航道嚴酷的自然環境和安裝條件。針對航道環境條件以及安裝條件的特殊性,采用工業移動通訊技術來組建內河航道物聯網。
工業移動通訊技術在航道中應用的重要原因是符合工業領域用戶的要求,尤其是對確定性響應有較高要求的用戶。目前工業無線移動通訊產品的主要優點在于其無線通道的可靠性、防水設計(IP65)和機械耐用性;其次是這種無線解決方案以無線客戶端和無線接入點設備作為網絡節點,可以靈活方便地利用節點進行跳傳,極大地提高了網絡覆蓋范圍和傳輸距離。
1、節點模塊
1.1無線客戶端(Client)
利用航道里分布有航標和水位站的天然條件,是用來安裝在航標RTU、水位RTU及其他航道傳感器上的網絡控制器,通過它將RTU等設備接入到無線接入點覆蓋的無線網絡中,達到移動設備通訊聯網的目的。
1.2無線接入點(AP-Access Point)
無線接入點設備用來輻射一個無線信號區域,其功能就象一個無線的基站一樣,用于無線客戶端的接入。目前適合航道應用的無線接入點設備可采用基于國際標準IEEE802.11,運行頻率為2.4GHz和5GHz,其數據傳輸速率最高達54Mbit/s(可穩定傳輸視頻信號)。在物理連接上它像紅外線一樣是無線連接的,但要比紅外射線在作數據傳輸上有更好的表現,它對有些障礙物具有一定的穿透性,在一個規則的物理空間內具有很好的反射效果,這樣可以實現非直視數據傳輸,可靠性可以在一定程度上得以提高。
目前的AP無線信號的覆蓋范圍最大為3~4公里,AP與AP之間采用跳傳技術進行聯網,這樣就增大了網絡覆蓋范圍和傳輸距離。
2、航標間距的統計分析
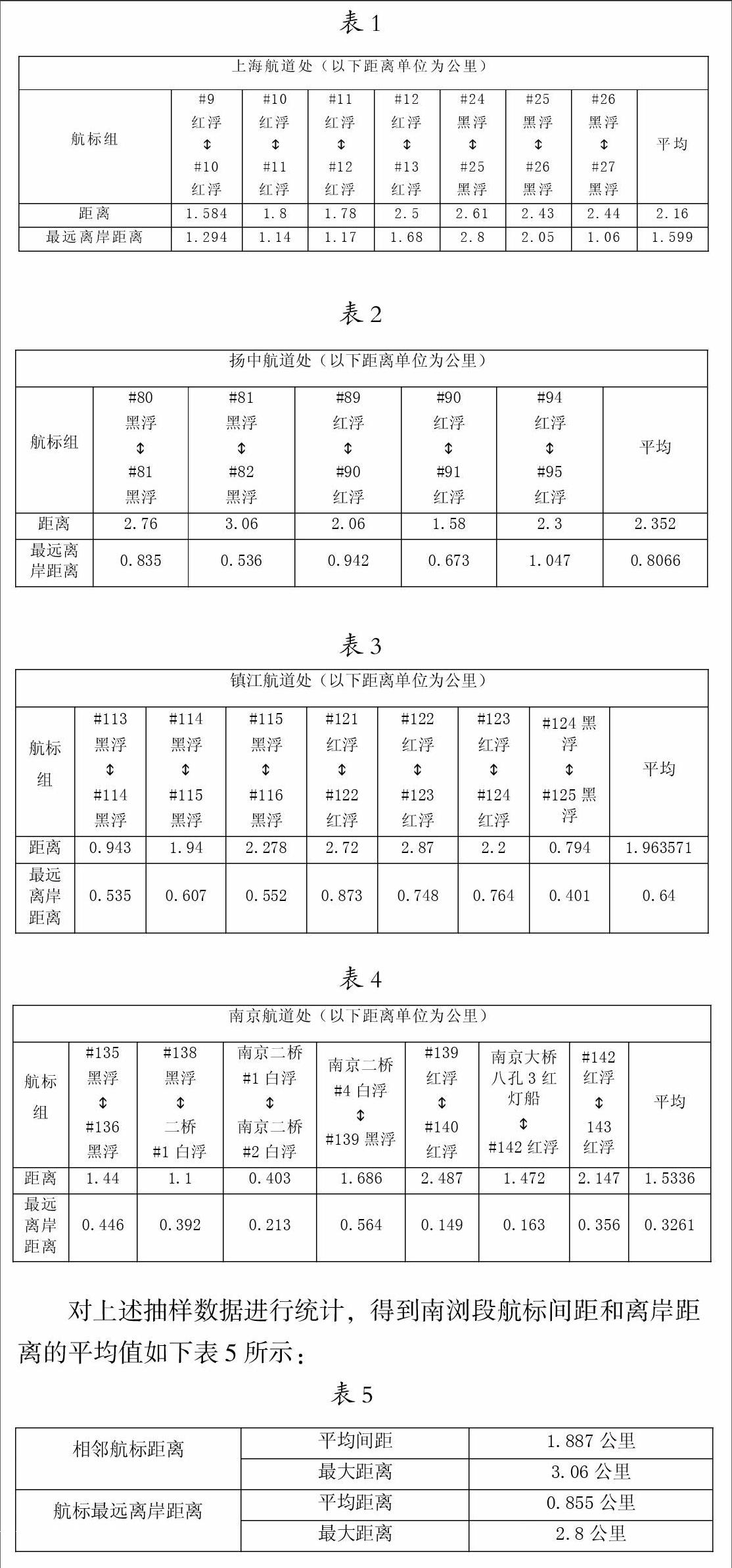
對南京航道局的上海、揚中、鎮江和南京四個航道處的航標進行勘察,測量相鄰航標間距和航標最遠離岸距離進行統計分析,隨機抽樣26組航標數據如下表1、表2、表3、表4:
表1
表2
表3
表4
對上述抽樣數據進行統計,得到南瀏段航標間距和離岸距離的平均值如下表5所示:
表5
上述測量數據顯示,相鄰航標距離中有一組數據鎮江處口岸直水道#81黑浮至#82黑浮距離達到3.06公里米,但其它所有數據值都在2公里左右;上海處#24黑浮離岸距離為2.8公里是所測數據中航標最遠離岸距離的最大值,其他航標最遠離岸距離在1公里之內。
AP無線信號的覆蓋范圍最大為3~4公里,從上述航標間距和離岸距離的統計分析可以看出,以航標(包括水位站和岸邊建筑物作為輔助)作為載體,安裝AP和Client設備作為網絡節點是可行的。
3、網絡架構
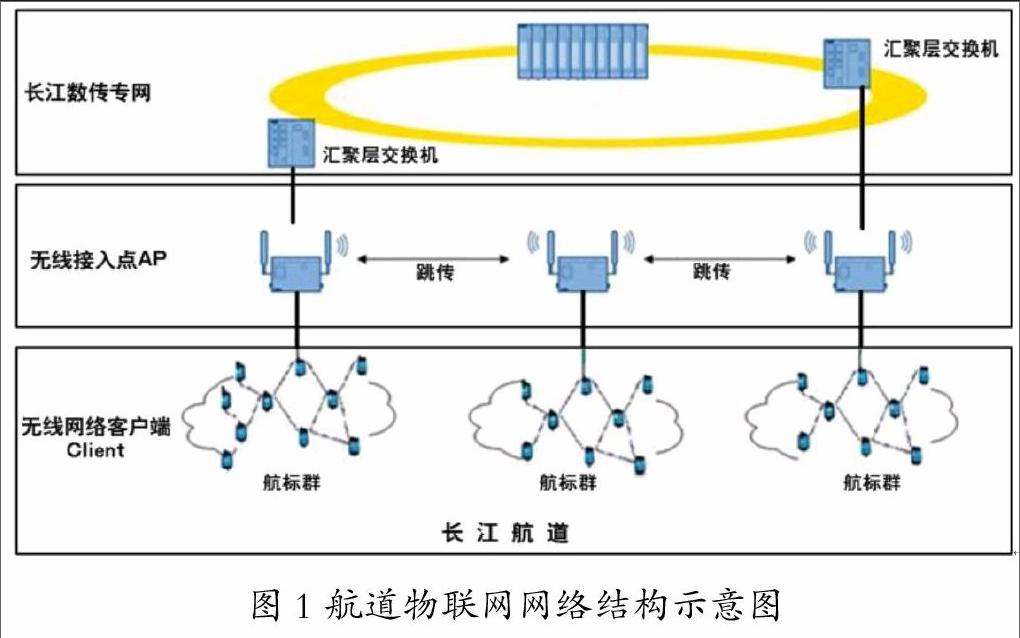
目前南京航道局上海、揚中、鎮江和南京四個航道處共分布約900多個航標RTU和19個水位RTU。根據航道的具體地理環境以及航標(浮標和陸標)、水位站和岸上建筑物的分布情況,在這些航道信息采集節點上安裝無線網絡客戶端Client和無線網絡接入點AP組成無線通訊網絡(如下圖1)。中間節點安裝網絡接入點AP,完成網絡的跳傳和中繼功能。航道中的網絡鏈路由接入點AP匯聚到躉船或航道站的交換機上,最終接入長江數傳專網。
圖1 航道物聯網網絡結構示意圖
結束語
在數字航道工程的基本網絡架構上,提出了一種全新的通訊模式和網絡結構,希望從根本上解決數字航道通訊穩定性和可靠性問題。通過建立這種不依賴移動通訊公網、自主、獨立的通信網絡,確保航標RTU、水位RTU以及“船端系統”到數據中心的通訊鏈路的暢通,保障數字航道系統的穩定運行。航道物聯網的構建將為數字航道開辟一種新的網絡模式,如果未來能將長江數傳專網、AIS基站鏈和航道物聯網三網融合,將會開創數字航道全新的通訊模式。
(作者單位:長江南京航道局)
猜你喜歡
軟件導刊(2016年9期)2016-11-07 21:56:29
軟件導刊(2016年9期)2016-11-07 21:32:45
中國科技博覽(2016年22期)2016-11-01 15:02:01
中國科技博覽(2016年22期)2016-11-01 13:21:09
中國科技博覽(2016年19期)2016-10-19 14:58:22
電腦知識與技術(2016年21期)2016-10-18 22:33:02
科技視界(2016年22期)2016-10-18 17:23:30
中國新通信(2016年16期)2016-10-18 11:01:39
中國新通信(2016年16期)2016-10-18 11:00:54
科學與財富(2016年28期)2016-10-14 01:24:06