液控核輻射環境拆除機器人控制系統
2014-03-18 07:20:06皮明楊濤張華
機床與液壓 2014年21期
皮明,楊濤,張華
(西南科技大學信息工程學院,特殊環境機器人技術四川省重點實驗室,四川綿陽621010)
0 前言
2011年3月發生的日本福島核電特大泄漏事故和1986年4月的切爾諾貝利核事故造成了巨大的人員和物資損失,從而也使核電安全問題越來越成為全球各國關注的焦點。新近建設的核電站雖然在設計階段對可能發生的意外情況作了預防和緩解,但由于運行設備的老化和操作失誤等原因[1-2],仍由可能引發嚴重事故。福島核事故的發生除與地震災害有直接關系外,也與設備老化(福島核電站一號機組服役超過40年)有直接關系。而在我國現運營的13 臺機組當中,秦山和大亞灣核電站運行時間也均超過17年,正值設備檢修、更換的頻繁期[3]。因此,必須對核電設施進行嚴格的監測和維護,及時發現并更換老化、故障設備,并對廢棄核裝置進行去污和拆卸等處理,以保證核電站正常、安全地運行[4]。而這些作業通常環境復雜,場地狹窄,含有大量輻射,不便于人的長時間作業。液壓驅動的拆除機器人,與電機驅動的機器人相比,具有體積更小、負載更大的優勢,其靈活性和實用性也已得到了實踐的檢驗。
Brokk 多功能拆除機器人是瑞典布魯克公司(Brokk AB)生成的液壓鏟除設備,可用在建筑拆除、搶險救援、核能高危等行業[5]。具有遙控操作、安全、高效的特點。該機為電液驅動,采用無線/有限遙控方式,使操作人員遠離危險現場,在遙控盒上操縱機器人,確保安全。根據工作的不同,其可更換不同的工作頭,如液壓破碎錘、液壓剪等,最大效率地利用現有設備。
而國內驚天液壓公司生產的多功能拆除機器人[6],為國內唯一的遙控拆除機器人,擁有完全的自主知識產權。但其操作的靈活性和控制精度仍不如Brokk 機器人,有待進一步的提高。
文中針對核輻射環境下的工作特點,設計了一種更加適合精細作業的液控拆除機械臂,在對其幾何結構特性進行描述之后,采用負載反饋式變量泵電液比例液壓系統,對各液壓缸和液壓馬達進行閉環控制伺服調節。最后,通過一個液壓錘的作業任務(鑿出一個φ400 mm 的圓孔)的仿真,驗證了機器人液控系統的有效性。
1 基本構造和結構模型
液控拆除機器人主要由六自由度機械臂、快速更換接頭、回轉機構、履帶行走機構、前支撐鏟、動力裝置、液壓系統和機罩等組成,如圖1所示。
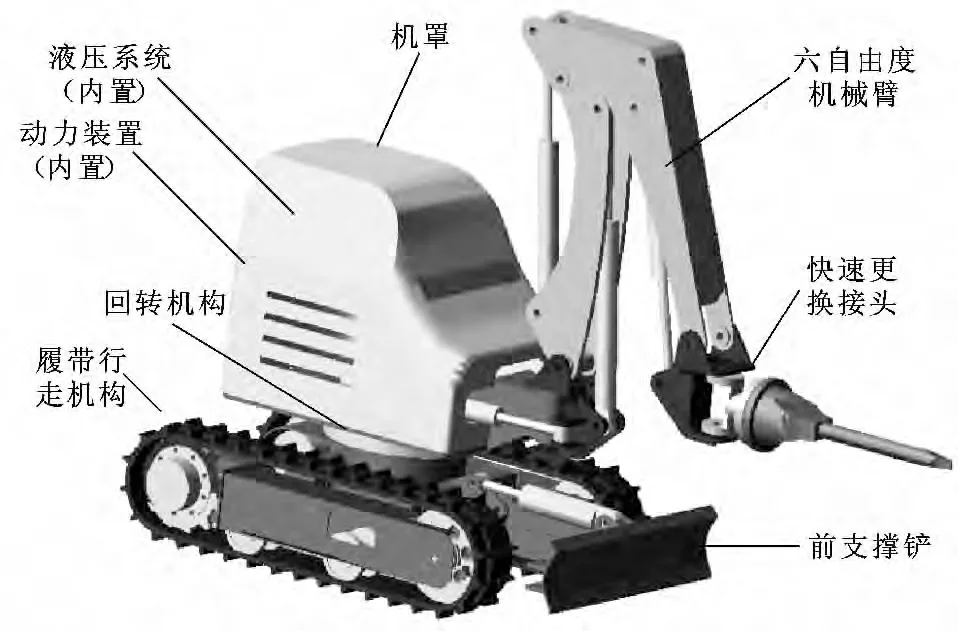
圖1 液控拆除機器人構造
六自由度機械臂由肩關節、2 節工作臂、肘關節和快速更換接頭,以及4 個液壓缸和2 個液壓馬達等組成,各部件之間鉸接連接,依靠4 個液壓缸和2 個液壓馬達的伸縮和回轉實現拆除機器人的各種動作。
液壓馬達1 內置于肘關節內部,通過前端的行星減速器與快速更換接頭連接。馬達內部集成了制動、緩沖和防反彈等控制閥,可實現快速更換接頭的回轉、制動和定位等一系列動作。液壓馬達2 內置于快速更換接頭內部,其前端的行星減速器與工作裝置連接。馬達內部同樣集成了控制閥,可實現工作裝置的回轉、制動和定位等動作。
液壓缸1、2、3 和4 用于實現肩關節、工作臂和肘關節的擺動,其擺動量與相應的液壓缸的伸縮量成對應關系。在圖2 中,液壓缸3 的伸縮量S3決定了關節3(即:工作臂1 與工作臂2 之間的夾角)的轉動角度θ3的值。
θ1-3+θ2-3+θ3+θ4-3=360°
θ1-3=360°-θ2-3-θ3-θ4-3
θ3由機械臂逆運動學可得,為變量;
θ4-3為工作臂2 的結構參數,為常數。
則


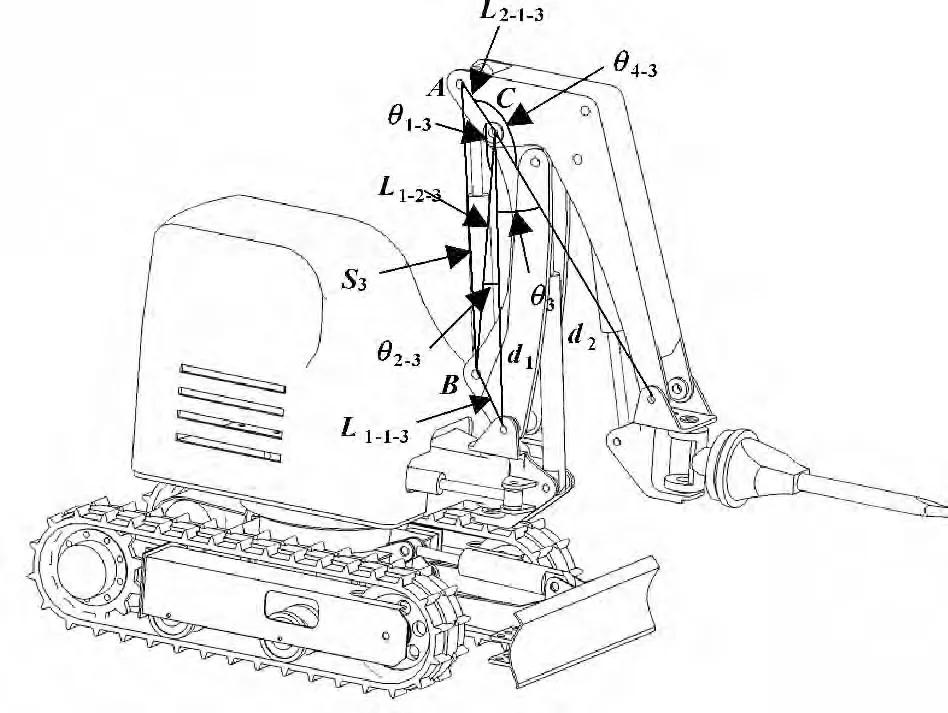
圖2 液壓缸3 與關節夾角3 的對應關系
對于肩關節和肘關節處的擺動角度θ1、θ2和θ4,其對應關系相對簡單。
2 抗輻射加固
2.1 非金屬材質抗輻射性能
拆除機器人機械結構本體采用合金鋼,但其密封器件、油液管路和電子控制系統等大部分采用的是橡膠和塑料等有機高分子材料,當輻照時間、劑量超過其相應的承受閾值時,如:輻照劑量遠遠大于100Gray 時,就會發生質變、老化甚至燃燒等情況。因此,在拆除機器人進入核輻射現場之前,必須對相關零部件,如:密封圈、電線膠皮、橡膠履帶等進行輻照實驗,確定其是否可以在現場長時間安全作業。
2.2 電氣控制元件的抗輻射加固
電氣控制元件在輻照情況下發生失靈、損壞等現象,一方面是因為電線膠皮老化造成的短路引起的,另一方面是由于處理器或晶閘管等本身受輻照影響損壞造成的。因此,電氣控制元件的抗輻射加固,除了要對電線膠皮、電路板等進行輻照性能試驗外,還要額外地增加輻照屏蔽裝置,以保護處理器、晶閘管等元器件。
屏蔽裝置通常是用鉛板組成一個腔體,罩住要保護的部位。但這種方法不但價格昂貴,而且增加了控制器的質量和體積,從而有可能影響機器人的回轉和機械臂的靈活性等。而采用含重金屬離子的高分子涂料或復合材料[7-9],不僅可以達到相同的保護效果,而且由于質量和體積的大為減少,也使機器人能夠獲得更優異的控制性能。
3 液壓控制系統組成
3.1 液壓泵的選型
為適應現場工作環境,六自由度機械臂必須具有多液壓缸、液壓馬達協同運動能力,即:多液壓缸、液壓馬達同時動作,但又不影響彼此的運動。為此,采用目前較為成熟的負載反饋式電液比例液壓控制系統[10]。同時為了節省功耗,采用負流量控制[11]方式對液壓泵進行調節,如圖3所示。

圖3 液壓泵負流量控制
在負流量控制中,節流器位于回油路上。當液壓缸不動作時,液壓泵泵出的液壓油流經電磁閥組后通過回油路流回油箱,此時節流器壓力最大,控制器采集壓力信號后,控制變量泵使它們排量最小;而當液壓缸動作時,液壓油通過液壓缸后流回油箱,而不通過節流器,此時節流器壓力降低,控制器則控制變量泵排量增大,增加的排量進入液壓缸,用于執行動作。這樣就可以減少機械臂保持位姿時的液控系統的能量損失,同時也延長了各零部件的使用壽命。
由于液壓執行器同時動作時所需液壓油量遠高于保持位姿時,故采用“主泵+ 輔泵”的供油模式。當液壓執行器保持位姿或同時動作但所需流量較小時,只有主泵供油;當液壓執行器同時動作所需流量較大時,主泵和輔泵一起供油。相比單泵供油,在相同的供油量調節范圍內,“主泵+輔泵”供油模式調節精度更高,并且在低供油量階段,由于輔泵不參與供油,因此也減少了系統額外的能量損失。
3.2 液壓系統工作過程
工作過程如圖4所示,液壓泵均為變量柱塞泵,與電機軸通過彈性聯軸器連接。當電機轉動時,驅動變量柱塞泵工作,產生的高壓液壓油通過電磁閥組A供給六自由度機械臂和液壓工作裝置,電磁閥組A中各電磁閥的開口量由控制器給出。由于采用的是負載反饋式電液比例液壓系統,因此各液壓執行器不會產生負載耦合,其運動行程和速度也只與各自電磁閥開口量有關,與負載無關。
另一路高壓液壓油經回轉接頭通向機器人底盤,也采用負載反饋式電液比例液壓系統,通過電磁閥組B 控制底盤液壓執行器的動作。
液壓缸和液壓馬達均經過抗輻射加固和集成化改造,其密封裝置和傳感器均能長時間在大劑量輻照下正常工作。液壓缸和液壓馬達位移輸出端分別加裝直線位移傳感器和角位移傳感器,輸出信號接入控制系統,形成液壓執行器的閉環控制。液壓馬達內部集成制動、緩沖和防反彈等控制閥,便于系統控制;而由于本身具有緩沖結構,液壓缸只需集成液壓鎖就可具有制動、緩沖等功能。
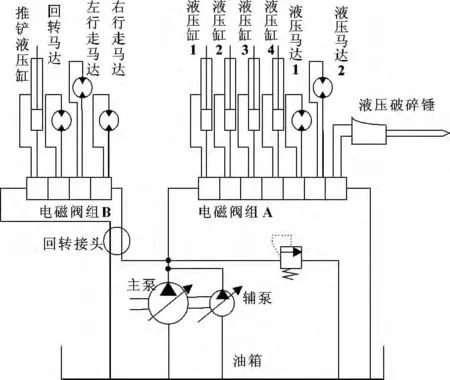
圖4 液壓系統原理示意圖
4 液控系統仿真
在Adams 中構建拆除機器人的模型,添加各液壓執行器驅動、位移傳感器等,生成EASY5 可以識別的目標文件AD(Adams Mechanism)。由于液壓破碎錘不需要旋轉運動,故將液壓馬達2 鎖死,只需控制前五個自由度即可。拆除機器人六自由度機械臂參數如表1所示。
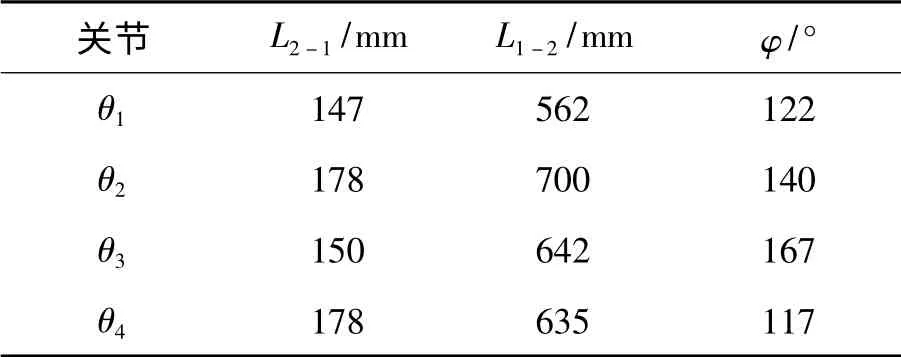
表1 六自由度機械臂參數
在EASY5 中構建拆除機器人六自由度機械臂的液控系統,不包括液壓馬達2 的控制回路,如圖5所示。
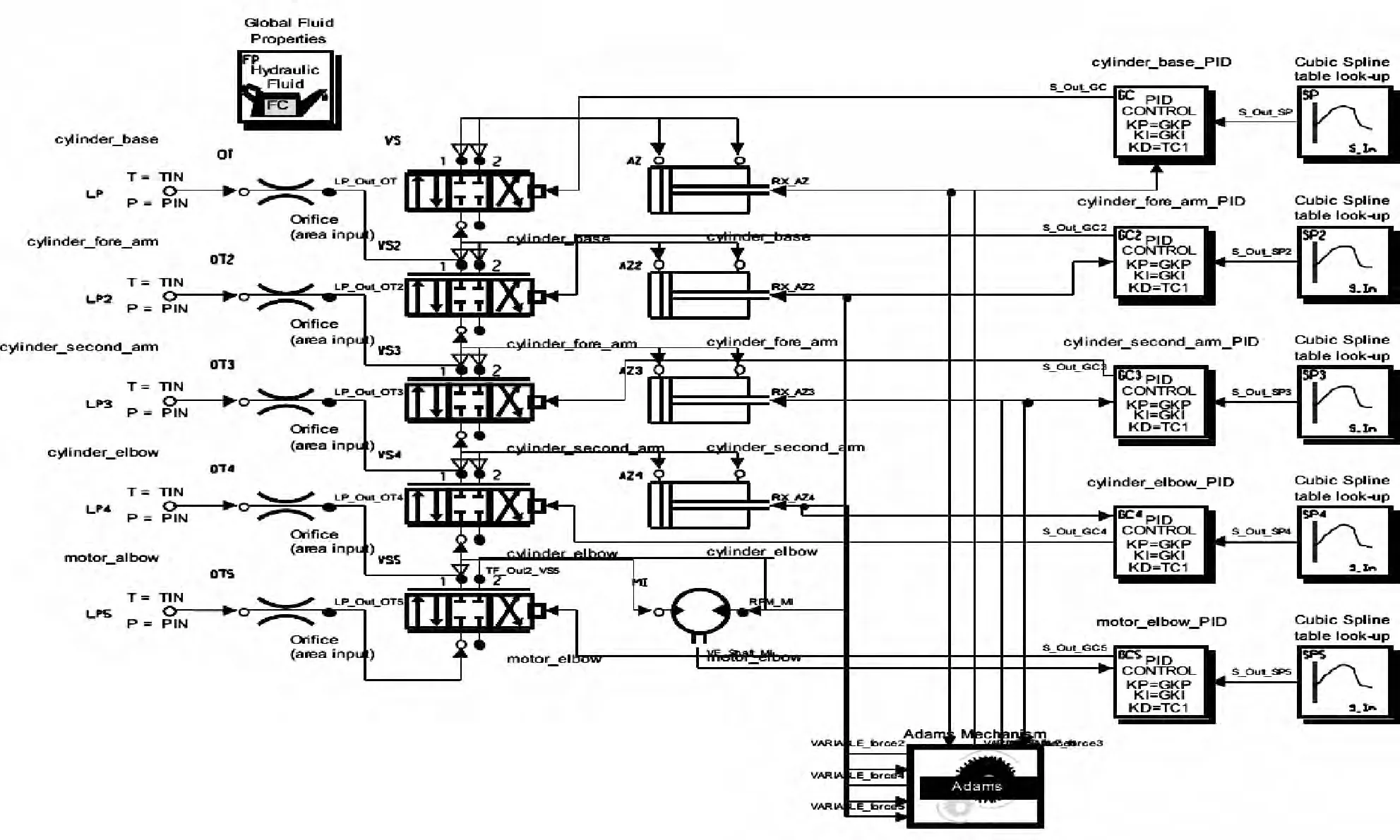
圖5 六自由度機械臂液控仿真模型(不包括液壓馬達2 控制回路)
圖5 中,液壓缸1、2、3、4 和液壓馬達1,形成6 個自由度,共同決定液壓破碎錘的位姿。由于采用負載反饋式電液比例液壓系統,通過電磁閥的流量只與電磁閥開口量有關,故采用恒壓源模塊LP1 ~5 模擬液壓泵對執行器的供油。根據第一節中的介紹,液壓缸伸縮量與關節轉角的關系(液壓馬達轉角等于相應關節轉角),結合運動學逆解算法求出各執行器動作量與時間的對應關系,并以表格形式存儲在模塊FU1 ~5 中,再通過PID 調節模塊對電磁閥輸入電流進行調節,控制液壓缸伸縮量和液壓馬達轉動量,并將伸縮量和轉動量實時傳給AD(Adams Mechanism)模塊,同時獲得作用于各自執行器末端的阻力和阻力矩。這樣就實現了液控系統模型與六自由度機械臂結構模型的控制的耦合。具體仿真結果如圖6所示。
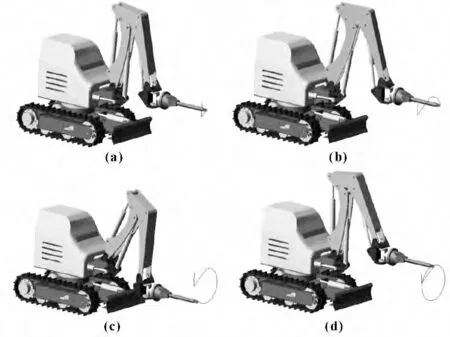
圖6 六自由度機械臂液控仿真結果
液壓破碎錘末端按照規劃的運動軌跡鑿出了一個φ400 mm 的圓孔,完成了設定的任務,表明了液控系統模型的正確性和有效性。
5 結論
針對核輻射環境下的應用要求,研制開發了一種液壓驅動的拆除機器人系統,并對其幾何結構特性和液控系統進行了詳細分析,最后,通過一個液壓錘的作業任務(鑿出一個φ400 mm 的圓孔)的仿真,驗證了機器人液控系統的有效性。
[1]BUCKINGHAM R O,GRAHAM A C.Dexterous Manipulators for Nuclear Inspection and Maintenance-Case Study[C]//1st International Conference on Applied Robotics for the Power Industry.Piscataway,NJ,USA:IEEE,2010:6.
[2]ROBERTSON D,TAYLOR C J.State-dependent Control of a Hydraulically-actuated Nuclear Decommissioning Robot[C].Control(CONTROL),2012 UKACC International Conference on,2012:759-764.
[3]GOSSE lin,CLEMENT.Under-actuated Versatile Gripper for the Cleaning of Nuclear Sites[C].Applied Robotics for the Power Industry(CARPI),2010 1st International Conference on.
[4]BERKOWITZ D A.Nuclear Power and Radionuclides in the Environment[J].Power Generation and Environmental Change,2013:21.
[5]王進.Brokk 多功能拆除機器人及其應用[J].建筑機械,2006(11):83-85.
[6]張振軍.拆除機器人液壓系統研究[D].西安:長安大學,2009.
[7]馬濤,劉宇艷,劉振國,等.一種新型梯度防核輻射材料的制備[J].高分子報,2012(16210):58-62.
[8]CHEYMOL G,VILLARD J F,Gusarov A,et al.Fiber Optic Extensometer for High Radiation and High Temperature Nuclear Applications[C].Advancements in Nuclear Instrumentation Measurement Methods and their Applications(ANIMMA),2011 2nd International Conference on.
[9]RUNKLE R C,BERNSTEIN A,VANIER P E.Securing Special Nuclear Material:Recent Advances in Neutron Detection and Their role in Nonproliferation[J].Journal of Applied Physics Volume,2010,108:111101-111101.
[10]KIM KI Yong,JANG Dal Sik,CHO Yong Lak,et al.Development of Electro-hydraulic Control Valve for Intelligent Excavator.ICCAS-SICE,2009:2212-2216.
[11]LIAO Wen Bin,CHEN Shu Mei,CHEN Chuan Ming,et al.Research of Negative Flow Control Characteristics for Axial Piston Pump Based on Hydraulic and Mechanical Co-simulation.System Science[C].Engineering Design and Manufacturing Informatization(ICSEM),2012 3rd International Conference on.
猜你喜歡
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
電腦報(2020年35期)2020-09-17 13:25:53
當代工人(2020年8期)2020-05-25 09:07:38
電腦報(2019年40期)2019-09-10 07:22:44
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
小溪流(畫刊)(2017年12期)2018-01-10 16:07:29
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
科技知識動漫(2016年8期)2016-07-29 20:40:09
