基于無人機影像的真正射影像制作研究
2014-03-22 00:13:12周智勇
城市勘測 2014年3期
周智勇
(重慶市勘測院,重慶 400020)
1 引言
傳統的正射影像利用定向后的影像和數字高程模型DEM通過數字微分糾正技術獲取,其地形地貌經過了數字微分糾正,但并未考慮人工建筑物等空間目標,依然存在投影差。大比例尺城市地區正射影像中,建筑物傾斜、遮擋問題更為嚴重,如將矢量地圖疊加到正射影像上,會表現出道路線橫穿建筑物以及建筑物矢量輪廓無法與其自身疊合等問題,嚴重時將會導致其失去地理參考價值,不足以作為底圖使用[3]。真正射影像即是在上述背景下提出來的一種更高級的正射產品。真正射影像兼備了豐富的紋理信息和地形圖的幾何屬性,受到了國內外攝影測量學者的廣泛關注。
常規航攝因為天氣原因、空域管制等諸多限制因素,獲取能夠滿足真正射影像制作的影像成本太高。而無人機航攝系統因其快速機動響應能力、操作簡單、使用成本低及高分辨率遙感影像數據獲取能力等優勢[4],成為獲取大重疊度影像的較佳選擇。
目前能夠完成數字真正射影像制作的有像素工廠、INPHO等數字攝影測量系統。無人機影像具有數據量大、POS精度較低等特點,像素工廠支持海量數據處理及針對無人機影像數據的專有優化模型,因此本文選擇像素工廠進行無人機影像的數字真正射影像制作研究。
2 基于無人機影像的真正射影像制作流程
如圖1所示:
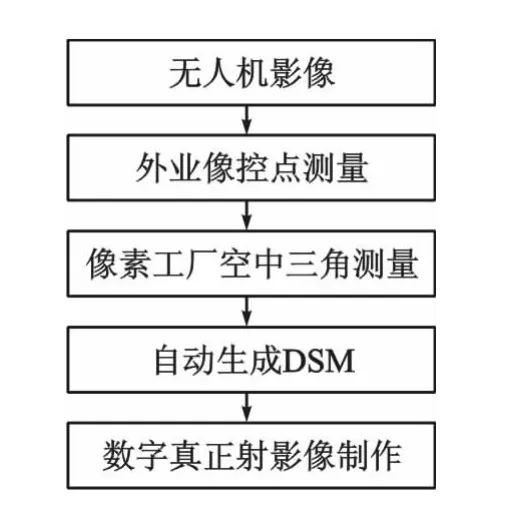
圖1 基于無人機影像的真正射影像制作流程
3 基于像素工廠的無人機影像空三
無人機影像采用普通民用相機航攝獲取,具有像幅小、影像張數多、POS精度低、相機投影中心與POS系統之間存在偏差等特點。像素工廠設計有針對無人機影像的專有模塊——MultiFrame,通過像素工廠QGIS軟件對POS數據進行自動排航帶及編輯處理,并編寫相機文件,得到滿足像素工廠數據格式的POS及相機文件,同時依排航帶后POS數據中影像名對影像進行重命名。在像素工廠中定義項目橢球與投影,導入POS及影像數據。
在像素工廠平臺上處理無人機遙感影像時,依據影像像幅設置合適參數進行自動布點,進行航帶內及航帶間轉點,同時依據初始POS數據投影偏差確定同名影像搜索范圍、相似度等參數,進行基于物方的同名點自動影像匹配。利用密集的連接點構建自由網,通過專有優化模型,考慮了鏡頭畸變、內方位元素參數、POS與相機投影中心之間的偏心矢量和偏心角以及切比雪夫多項式系數等多種因素的影響,并將這些因子作為優化參數,通過分組綁定實施空三優化,形成穩健的自由網[5]。導入地面控制點進行判讀量測,與自由網進行空三聯合平差,直至基本定向點、檢查點符合成圖精度。
4 真正射影像制作
真正射影像制作主要包括兩方面:遮蔽區域檢測和紋理修補。其中,遮蔽區域檢測包括兩種方法:①利用自動匹配獲取的數字表面模型進行遮蔽區域檢測;②利用數字建筑物模型檢測遮蔽區域。像素工廠利用數字表面模型進行遮蔽區域檢測。
4.1 像素工廠真正射影像制作原理
像素工廠生產真正射影像時需要使用準確的數字表面模型,數字表面模型起到的關鍵作用是可以幫助探測到影像中的封閉地物。其原理可以被理解為:如果連接透視中心和數字表面模型影像中的一個點的光束遇到某地物,則此數字表面模型影像中的點的原始影像中將被此地物遮擋。如圖2所示:

圖2 地面表面模型中地物遮擋示意圖
真正射糾正處理即檢查所有影像,從而檢測封閉地物,使用所有重疊影像中的有效像素替換被地物遮擋的影像內容,原則上使用入射角最小的影像像素。
4.2 數字表面模型獲取
像素工廠采用以下步驟生產DSM數據:
(1)從每個立體像對中提取高程模型數據。
(2)使用Merge DSM命令將所有子DSM數據合并成一個全局的DSM文件。使用內插值替代無值像素,在子DSM重疊區域采取過濾和平滑等處理方法消除由影像拼接引起的錯誤。
(3)使用Interpolate DSM命令,采用內插算法,使用臨近有效高程值替換無效高程值。
在實際情況中,影像中的垂直物體將會遮擋部分地面區域。同樣不可避免的是,影像匹配處理在部分區域匹配失敗或生成錯誤匹配結果:這將導致位于此類區域中的象元Z值錯誤。除此之外,DSM中還將存在一些由成像問題導致的其他錯誤。為了最大限度地減少手工編輯工作量,建議使用所有可用影像數據填補無值區域,或者使用其他立體像對的測量結果進行內插處理。當合并子DSM文件后,應該使用過濾工具清除由影像拼接引起的錯誤。
4.3 真正射影像糾正
真正射糾正處理將原始影像中的所有像素重投影到最終產品坐標系統中,并且必須正確定義影像中所有像素的XYZ坐標值,包括位于建筑物屋頂和植被冠層的像素。正射影像中的所有像素都來源于入射角最小的原始影像數據。真正射影像將使用所有重疊影像中的可用像素重現某些原始影像中被高大建筑物遮擋的影像內容。
重采樣處理流程:
(1)創建一張空的輸出影像;
(2)對輸出影像中的每個像素投影到DSM數據中;
(3)識別相鄰像素均可見的影像,在輸出影像中插入入射角最小的輸入影像像素;
(4)實施輻射均衡處理。
5 試驗與分析
試驗區位于重慶市墊江縣城,采用Canon 5D II相機進行航攝,共獲取有效像片936張,6條航線,覆蓋面積約 27 km2。影像尺寸為 7 168×5 440像素,分辨率 0.11 m,焦距為 24 mm,像元大小為 6μm,相對航高為 450 m,航向重疊約86%,旁向重疊約58%。原始影像中高層建筑物向各個方向傾斜,如圖3所示。像素工廠利用無人機POS數據結合外業實測像控成果進行空三,空三精度如圖4所示。像素工廠中自動生成DSM如圖5所示,編輯后DSM如圖6所示。利用DSM成果糾正制作TDOM,套合 1∶500地形圖情況如圖7所示。圖8為該區域DOM成果套合 1∶500地形圖情況。
從圖8可以看出,正射影像受高層房屋傾斜影響,會遮擋鄰近低矮地物,且套合矢量時高層房屋頂部與矢量相差較遠,作為參考底圖使用受到一定影響。從圖7可以看出,真正射影像能夠表現更多的地表紋理,并且與矢量套合情況良好,可以更好地服務于消防、市政、規劃、建設等各個行業。

圖3 高層建筑物朝不同方向傾斜

圖4 空三結果
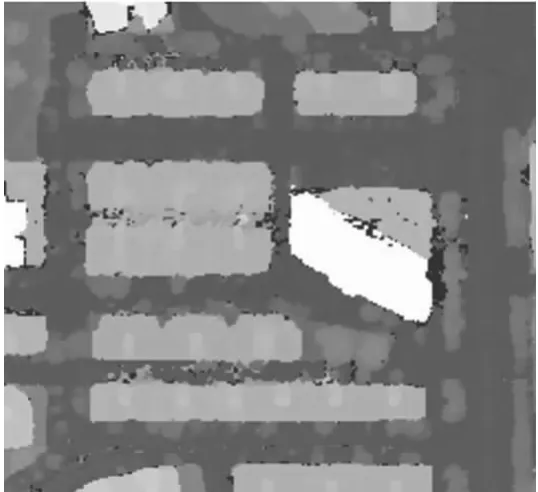
圖5 像素工廠自動生成DSM
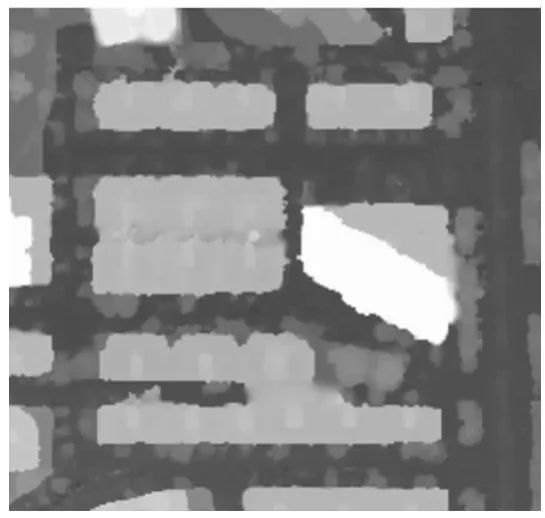
圖6 處理后DSM

圖7 TDOM套合 1∶500地形圖

圖8 DOM套合 1∶500地形圖
6 結語
由于無人機遙感技術的成熟,無人機已經逐漸應用在常規航測生產中。本文探討了利用像素工廠進行無人機影像空三、自動數字表面模型獲取及數字真正射影像制作原理及流程,并通過試驗區進行了真正射影像制作。結果表明,基于無人機影像利用像素工廠制作數字真正射影像方法可行,精度可靠,具有一定的推廣價值。通過本次試驗,發現利用無人機影像制作真正射影像,在航攝、空三及后期數據處理需要注意以下幾點:
(1)無人機航攝首先應滿足低空航攝各項要求,同時考慮無人機航攝時航高較低,高層建筑的傾斜現象較常規航攝更明顯,對周圍低矮建筑的遮擋更多,因此航攝時較常規航攝應具有更高的旁向和航向重疊度。為減少真正射影像的遮蔽區域,航向和旁向重疊最好達到80%或更高。
(2)影像重疊較大,加密點具有較高維度,因此自由網具有較高的可靠性,同時像素工廠支持POS輔助空三,因此對外業像控點需求不大,可大幅減少外業控制點數量。根據試驗結果,航帶內像控點基線條數達到35條,航帶間航線間隔條數達到3條。
(3)大重疊航攝導致影像張數驟增,后期空三及真正射影像制作數據量非常大,需要采用像素工廠采用多結點并行運算、磁盤陣列存儲等技術支持的遙感影像處理系統。
[1] 萬從容,郭容寰,楊常紅.數字真正射影像的研制[J].上海地質,2009(4):33-36.
[2] 王濤.真正射影像制作中有關算法的研究[D].北京:中國測繪科學研究院,2002.
[3] 許彪.基于航空影像的真正射影像制作關鍵技術研究[D].武漢:武漢大學,2002.
[4] 范承嘯,韓俊,熊志軍等.無人機遙感技術現狀與應用[J].測繪科學,2009(9):214~215.
[5] 鄒曉亮,繆劍,張永生等.基于像素工廠的無人機影像空三優化技術[J].測繪科學技術學報,2012(5):362~367.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年5期)2015-04-09 11:30:52