一種結(jié)合匹配區(qū)選擇和障礙物探測的水下路徑規(guī)劃方法
2014-03-26 01:10:58李蘭玉李開寒
武漢科技大學(xué)學(xué)報 2014年4期
關(guān)鍵詞:規(guī)劃
李蘭玉,熊 凌,李開寒
(武漢科技大學(xué)信息科學(xué)與工程學(xué)院,湖北 武漢,430081)
作為一種新型的水下無源導(dǎo)航技術(shù),基于重力場的水下輔助導(dǎo)航方法正逐漸成為研究熱點[1-4]。重力儀及重力梯度儀、重力場基準(zhǔn)圖和匹配算法是重力場輔助導(dǎo)航的三要素,因此相關(guān)研究內(nèi)容主要集中在重力梯度儀建模分析[5-6]、重力場基準(zhǔn)圖的制備[7-8]和重力場組合輔助導(dǎo)航匹配算法等方面。其中,關(guān)于匹配算法的研究相對較多,一般思路是將地形輔助導(dǎo)航方法應(yīng)用于重力場輔助導(dǎo)航中,如SITAN卡爾曼濾波算法、TERCOM匹配算法以及基于等值線迭代的ICCP 匹配算法等[9-11]。此外,也出現(xiàn)了與智能模式識別相關(guān)的匹配算法,如重力梯度多分量相融合的神經(jīng)網(wǎng)絡(luò)匹配算法[12]。
為了適應(yīng)復(fù)雜的水下環(huán)境、提高重力梯度輔助導(dǎo)航系統(tǒng)的定位精度,往往需要有合適的匹配區(qū)。研究人員利用重力梯度熵、粗糙度、相關(guān)度、均值和方差等數(shù)學(xué)統(tǒng)計特征,通過大量仿真研究得出重力輔助導(dǎo)航匹配區(qū)域選擇準(zhǔn)則,在適配區(qū)內(nèi)能達(dá)到較高的匹配概率[13-15]。
水下動態(tài)航路規(guī)劃不僅需要考慮適配區(qū)的選擇,還需進(jìn)行實時目標(biāo)探測和有效避障,才能保證潛器的導(dǎo)航安全。而目前航路規(guī)劃研究主要側(cè)重于算法方面的研究,如距離值傳遞法、基于柵格模型的雙波傳播算法、基于信息熵遺傳算法路徑規(guī)劃等[16-19],以此來提高優(yōu)化效率,加快規(guī)劃速度。
綜上所述,在水下潛艇重力場輔助導(dǎo)航領(lǐng)域,適配區(qū)選擇和路徑規(guī)劃研究往往是獨立進(jìn)行的,即在進(jìn)行適配區(qū)選擇時只是基于重力梯度特征值,而沒有考慮到實際避障問題,或者是只考慮避障問題而沒有顧及適配區(qū)和非適配區(qū)的具體情況。而實際上,根據(jù)重力梯度正演理論,重力梯度特征越明顯的地方,海底地形起伏越大,也就是說,適配區(qū)存在有暗礁的可能,同時,在規(guī)劃的航路中還存在其他靜止或移動的障礙,如他方潛器等。針對上述問題,本文提出一種結(jié)合適配區(qū)選擇和目標(biāo)探測的航路規(guī)劃方法,即進(jìn)行水下動態(tài)航路規(guī)劃時,不僅考慮適配區(qū)的選擇,還進(jìn)行實時目標(biāo)探測和有效避障,從而保障水下潛器的安全航行。
1 航路規(guī)劃原理
基于適配區(qū)選擇和目標(biāo)探測的航路規(guī)劃方法首先對潛艇要航行區(qū)域的重力梯度基準(zhǔn)圖進(jìn)行特征提取,這里選取的特征有重力梯度方差和標(biāo)準(zhǔn)差、重力梯度能量和重力梯度熵;然后應(yīng)用支持向量機(jī)根據(jù)這些特征進(jìn)行分類,按參數(shù)閥值選擇出適配區(qū)和非適配區(qū)。在適配區(qū),應(yīng)用A*算法進(jìn)行實時避障從而動態(tài)規(guī)劃出航路;在非適配區(qū),實時目標(biāo)探測和動態(tài)航路規(guī)劃同時進(jìn)行,從而避碰其他靜止或運動的潛器。通過適配區(qū)的選擇和實時目標(biāo)探測相結(jié)合,實現(xiàn)潛艇在適配區(qū)和非適配區(qū)的動態(tài)避障和路徑規(guī)劃。圖1為航路規(guī)劃示意圖,圖中潛艇從適配區(qū)中A點出發(fā),要航行至適配區(qū)的B點,圖中黑色塊部分表示適配區(qū)里的障礙物,非適配區(qū)內(nèi)的航路上有其他潛器;實線代表預(yù)先規(guī)劃好的航路,虛線部分表示結(jié)合適配區(qū)選擇和目標(biāo)探測的實時動態(tài)規(guī)劃后的航路。
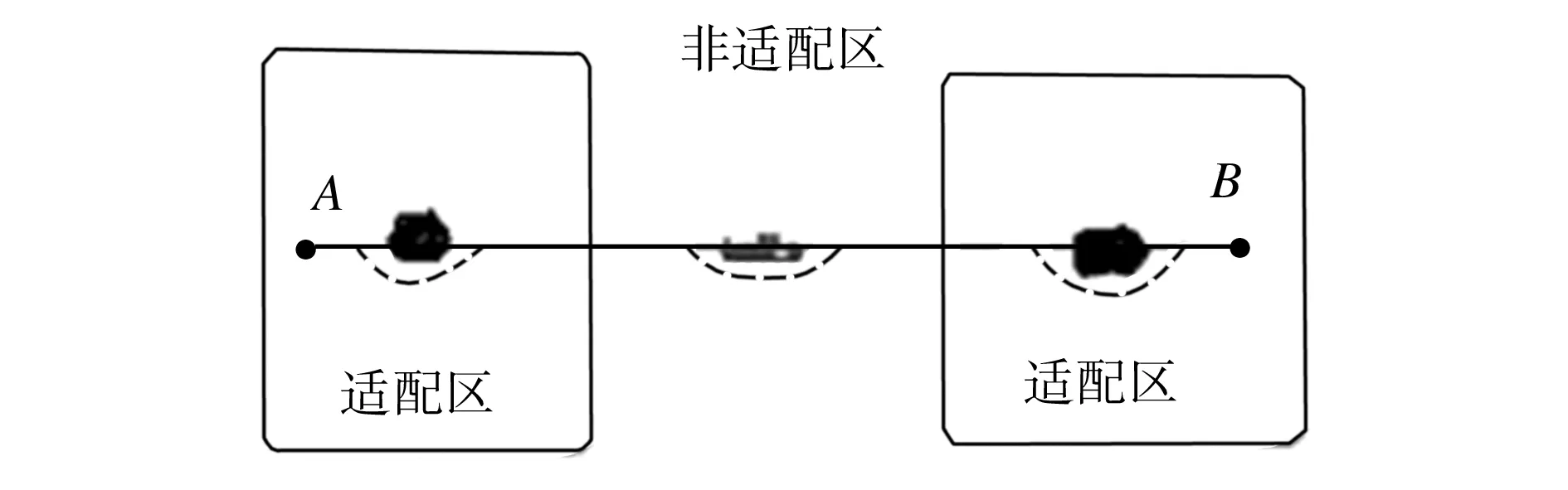
圖1 潛艇航路規(guī)劃示意圖Fig.1 Schematic diagram of submarine path planning
2 基于支持向量機(jī)的適配區(qū)選擇
2.1 重力梯度特征
用于適配區(qū)選擇的重力梯度特征包括方差及標(biāo)準(zhǔn)差、重力梯度能量、重力梯度熵。
方差σ2及標(biāo)準(zhǔn)差σ是反映重力梯度數(shù)據(jù)分布離散程度的物理量,其計算公式如下:
(1)

重力梯度能量E反映重力梯度數(shù)據(jù)總量的大小,其計算公式如下 :
(2)
重力梯度熵H也反映了重力梯度數(shù)據(jù)分布的離散程度。重力梯度熵越大,重力梯度數(shù)據(jù)分布越均勻,反之則重力梯度數(shù)據(jù)分布離散程度越大。H的計算公式如下:
(3)
(4)
2.2 基于支持向量機(jī)的分類方法
在重力梯度特征空間中,利用基于支持向量機(jī)(SVM)的分類方法將選定海域分為適配區(qū)和非適配區(qū)。
設(shè)樣本集(xi,yi),i=1,2,…,n,x∈Rd,y∈{1,-1}。建立L2范數(shù)非線性軟間隔SVM優(yōu)化問題的對偶形式:
(5)
s.t.αi≥0,i=1,2,…,n
若α*為式(5)的最優(yōu)解,根據(jù)Kühn-Tucker條件[21]求解后得到的最優(yōu)分類函數(shù)為
(6)
3 基于重力梯度反演的目標(biāo)探測
基于重力梯度的水下目標(biāo)探測技術(shù)實際上是將目標(biāo)物體視為密度異常的質(zhì)體,通過高精度的重力梯度儀測得因動態(tài)或靜態(tài)異常質(zhì)體引起的重力異常值Δg以及其導(dǎo)數(shù)的大小、變換規(guī)律等,進(jìn)而推測目標(biāo)的位置、形狀、質(zhì)量等參數(shù)。
如果探測目標(biāo)的距離遠(yuǎn)大于目標(biāo)尺寸,則全張量重力梯度值為
(7)

由式(7)進(jìn)行推導(dǎo),可得到探測目標(biāo)質(zhì)心的球坐標(biāo)(θ,φ,R)為:
(8)
因為目標(biāo)的質(zhì)量是固定的,所以只需測量兩次并結(jié)合載體的位置變化即可將R和m都求解出來,若進(jìn)行多次測量還可以提高求解精度。
4 航路規(guī)劃方法
適配區(qū)內(nèi)有著明顯的特征,可采用匹配策略進(jìn)行導(dǎo)航,而非適配區(qū)內(nèi)沒有明顯特征,因此采用跟蹤的策略進(jìn)行導(dǎo)航。考慮到適配區(qū)與非適配區(qū)的特點,航路規(guī)劃在適配區(qū)內(nèi)外分別進(jìn)行,基于重力梯度反演進(jìn)行目標(biāo)探測,應(yīng)用A*算法進(jìn)行動態(tài)航路規(guī)劃。
A*算法結(jié)合了啟發(fā)式方法和形式化方法的特點[22]。它通過一個估價函數(shù)來估計圖中的當(dāng)前點到終點的距離(帶權(quán)值),并由此決定它的搜索方向,當(dāng)這條路徑失敗時,再嘗試其它路徑。
5 仿真及分析
本文采用的仿真軟件為MATLAB。基于匹配區(qū)選擇和目標(biāo)探測的航路規(guī)劃仿真分為3個步驟進(jìn)行。
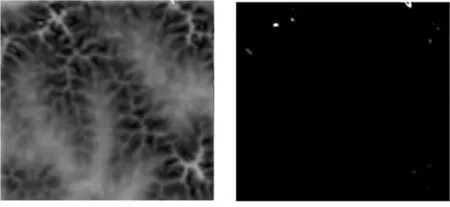
(1)重力梯度基準(zhǔn)圖特征提取和適配區(qū)選擇。仿真基準(zhǔn)圖的尺寸為512×512,分辨率為50 m×50 m。通過對重力梯度基準(zhǔn)圖的特征提取,得到各種特征分量數(shù)據(jù),如圖2所示。對數(shù)據(jù)進(jìn)行歸一化處理后,應(yīng)用SVM方法將基準(zhǔn)圖分為適配區(qū)和非適配區(qū),如圖3所示,圖中曲線所圍區(qū)域即為適配區(qū)。
在適配區(qū)內(nèi)選取一塊尺寸大小為5000 m×5000 m的區(qū)域,用均方差(MSD)算法進(jìn)行匹配計算,對其適配性能進(jìn)行驗證,仿真結(jié)果如圖4所示。仿真結(jié)果表明,在適配區(qū)內(nèi),忽略單點誤差進(jìn)行連續(xù)點匹配時,其匹配率能達(dá)到90%以上。
(a)局部均值 (b)局部標(biāo)準(zhǔn)差

(c)局部能量 (d)局部熵
圖2重力梯度特征分量
Fig.2Featuresofthegravitygradient
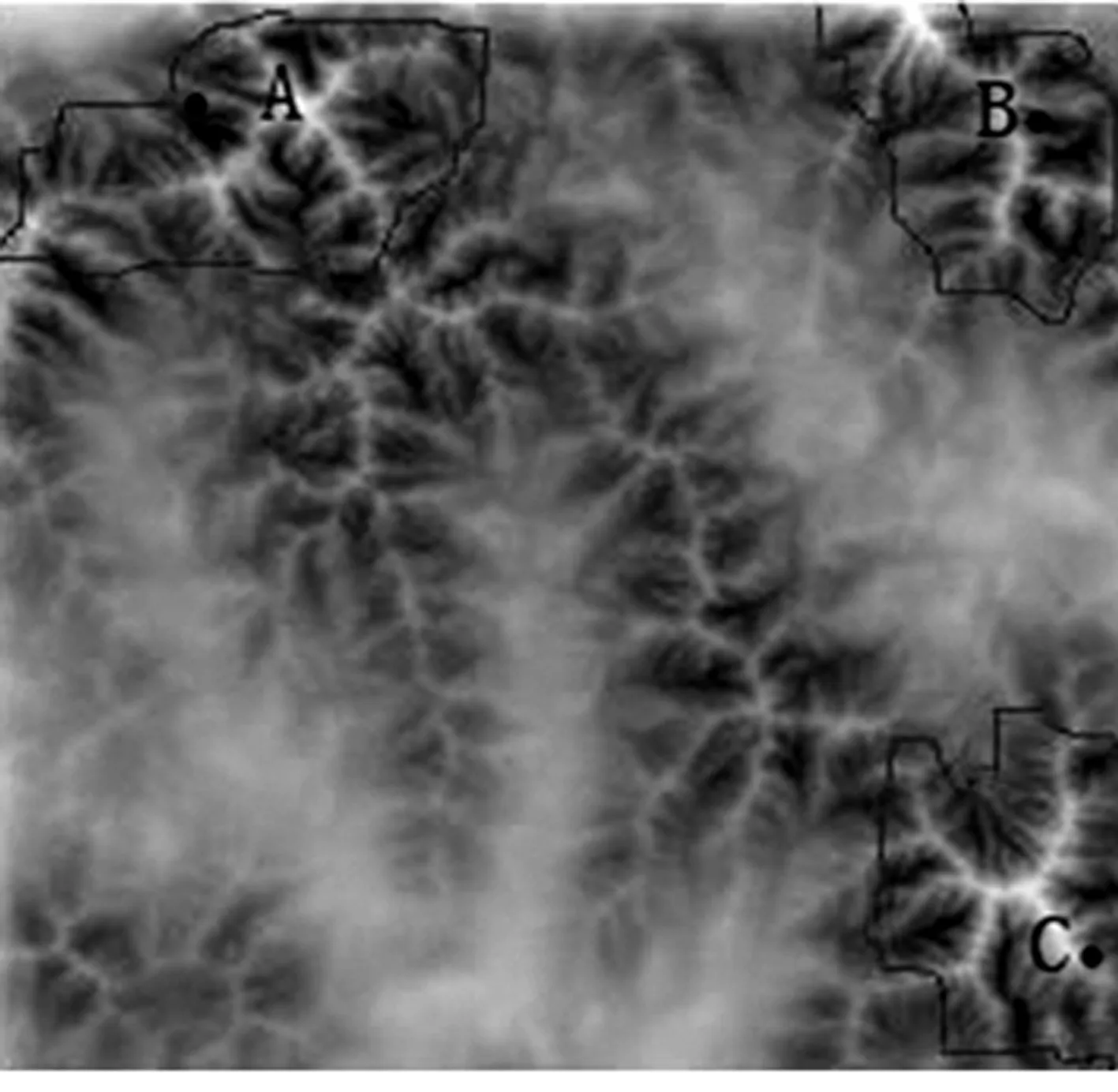
圖3 適配區(qū)和非適配區(qū)Fig.3 Adaptive and non-adaptive areas
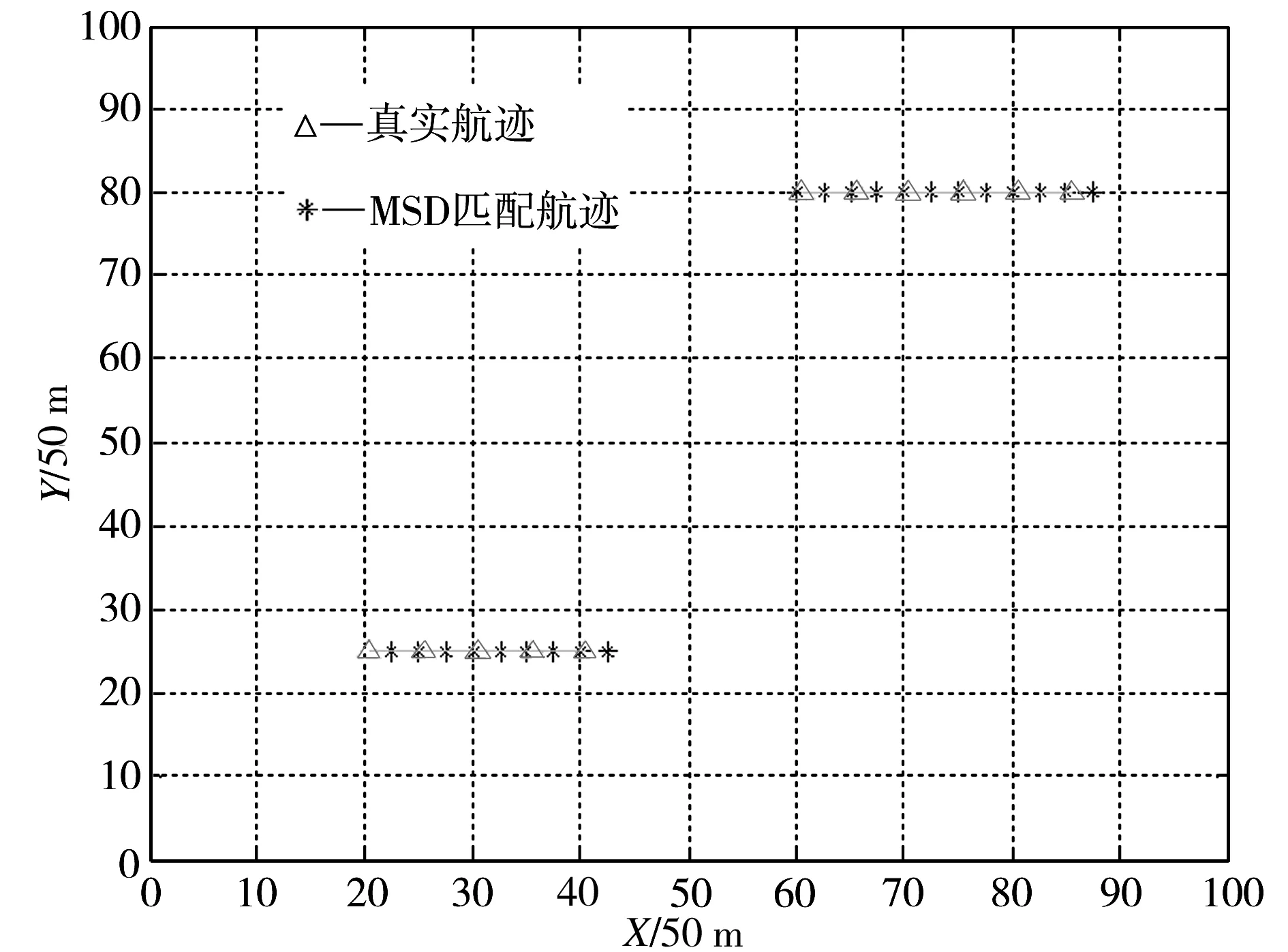
圖4 適配區(qū)內(nèi)的匹配效果Fig.4 Matching effect in adaptive area
(2)目標(biāo)探測。假設(shè)重力梯度儀的精度為10-5E,障礙物是邊長為100 m的立方體,其密度為2.7 t/m3,根據(jù)重力梯度反演方法得到障礙物的位置和質(zhì)量,其與障礙物真實位置和質(zhì)量的對比如表1所示。從表1中可以看出,當(dāng)障礙物在潛器前方500 m范圍內(nèi)時,可以誤差極小地反演出其位置和質(zhì)量信息。
表1障礙物位置和質(zhì)量的反演值與真實值對比
Table1Comparisonofinversionvaluesandtruevaluesoftheobstacle’spositionandmass
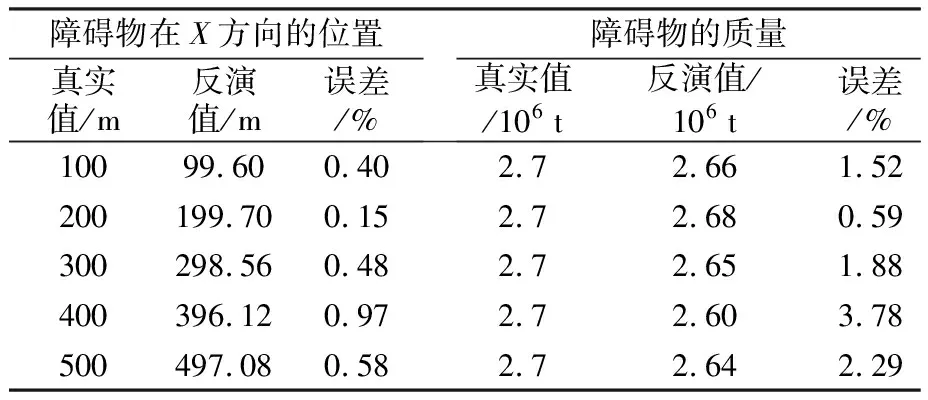
障礙物在X方向的位置真實值/m反演值/m誤差/% 障礙物的質(zhì)量真實值/106 t反演值/106 t誤差/%10099.600.402.72.661.52200199.700.152.72.680.59300298.560.482.72.651.88400396.120.972.72.603.78500497.080.582.72.642.29
(3)動態(tài)航路規(guī)劃。假設(shè)潛艇要從圖3中適配區(qū)內(nèi)的A點向東航行至另一個適配區(qū)內(nèi)的B點。航路規(guī)劃在適配區(qū)內(nèi)外分別進(jìn)行,仿真過程中利用重力梯度反演進(jìn)行目標(biāo)探測。
在匹配區(qū)內(nèi),障礙物區(qū)域為200 m×200 m,潛艇與障礙物安全距離為200 m,潛艇仿真行駛速度為50 m/步。航路規(guī)劃仿真結(jié)果如圖5所示。
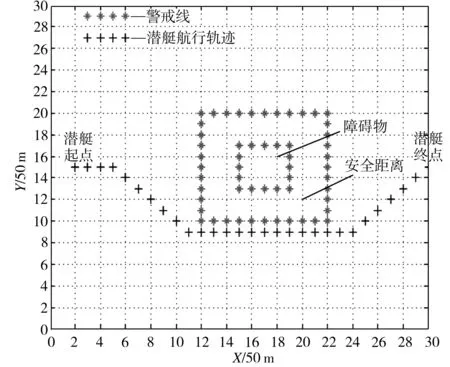
圖5 適配區(qū)內(nèi)的航路規(guī)劃Fig.5 Path planning in adaptive area
在匹配區(qū)外,假設(shè)障礙物是靜止的,動態(tài)規(guī)劃航路如圖6所示,潛艇航行速度為50 m/步。從圖6中可以看出,當(dāng)潛艇靠近目標(biāo)且距離達(dá)到設(shè)定的閥值時,潛艇向上繞行過障礙。
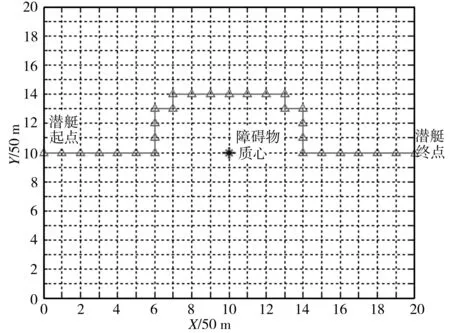
圖6 適配區(qū)外存在固定障礙物時的航路規(guī)劃
Fig.6Pathplanningwithfixedobstacleoutsideadaptivearea
在匹配區(qū)外,假設(shè)障礙物是運動的,且障礙物和潛艇以相同的速度同時從起點沿各自方向前進(jìn),其動態(tài)規(guī)劃航路如圖7所示。從圖7中的航跡可以看出,潛艇與障礙物的距離達(dá)到設(shè)定閥值時,潛艇向上繞行一小段,當(dāng)探測到兩者之間的距離大于閥值時,潛艇迅速回歸原航跡。
以上仿真結(jié)果表明,潛艇在水下航行時,能及時發(fā)現(xiàn)并繞開障礙物,同時又能高效快速地航行至目標(biāo)區(qū)域。可見本文提出的水下路徑規(guī)劃方法是有效的,達(dá)到了預(yù)期目的。
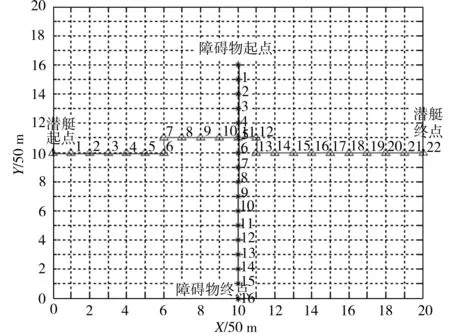
圖7 適配區(qū)外存在移動障礙物時的航路規(guī)劃
Fig.7Pathplanningwithmovingobstacleoutsideadaptivearea
6 結(jié)語
本文針對重力梯度輔助導(dǎo)航系統(tǒng)里的航路規(guī)劃、導(dǎo)航與避障問題,綜合考慮匹配區(qū)選擇和目標(biāo)探測,充分利用匹配區(qū)內(nèi)的有效特征,同時利用基于重力梯度反演的目標(biāo)探測進(jìn)行適配區(qū)內(nèi)和適配區(qū)外的動態(tài)航路規(guī)劃,既保證了適配區(qū)內(nèi)的匹配導(dǎo)航策略,又保證了適配區(qū)外的跟蹤導(dǎo)航策略。通過仿真分析驗證了文中提出的水下路徑規(guī)劃方法的有效性。
[1] Rice H, Mendelsohn L, Aarons R, et al. Next generation marine precision navigation system[C]//Position Location and Navigation Symposium, IEEE 2000. San Diego,CA,2000: 200-206.
[2] Xiong Ling, Ma Jie, Zhang Li, et al. Submarine navigation based on gravity gradient-terrain matching[C]//Proceedings of the Fifth SPIE International Symposium on Multi-spectral Image Processing and Pattern Recognition. Wuhan,China,2007,Vol.6790: 67904S.
[3] 呂良,劉敏,紀(jì)兵,等. 重力梯度儀在水下安全航行中的應(yīng)用[J].海洋測繪,2010,30(4):23-25.
[4] 王虎彪,王勇,許大欣,等. 重力異常和重力梯度聯(lián)合輔助導(dǎo)航算法及仿真[J].地球物理學(xué)進(jìn)展,2011,26(1):116-122.
[5] 李海兵,蔡體菁. 全張量重力梯度儀測量方程及誤差分析[J].東南大學(xué)學(xué)報:自然科學(xué)版,2010,40(3):518-604.
[6] 袁贛南,張紅偉,朱嶺. 重力梯度傳感器數(shù)據(jù)的模擬及其輔助導(dǎo)航[J].傳感器與微系統(tǒng),2012,31(10):23-26.
[7] 武凜,馬杰,周瑤,等. 重力場匹配導(dǎo)航的全張量重力梯度基準(zhǔn)圖模擬[J].系統(tǒng)仿真學(xué)報,2009,21(22):7037-7041.
[8] Ma Jie, Yang Fan, Yan Zu, et al. Density compensation to reference map of gravity navigation[C]//Proceedings of 2012 International Conference on Modelling, Identification and Control. Wuhan, China, 24-26 June, 2012:1129-1134.
[9] 王虎彪,王勇,許大欣.重力垂直梯度和重力異常輔助導(dǎo)航SITAN算法結(jié)果分析[J].機(jī)器人,2011,31(1):128-134.
[10]熊凌,馬杰,田金文. 基于粒子濾波的重力梯度與地形信息融合輔助導(dǎo)航方法[J]. 計算機(jī)技術(shù)與軟件,2010,27(2),85-87,110.
[11]吳宏悅. 基于地形熵和ICCP算法的水下輔助導(dǎo)航組合方法研究[J].艦船科學(xué)技術(shù),2011,33(3):53-58.
[12]Xiong Ling, Xiao Linwei, Dan Binbin, et al. Full tensor gravity gradient aided navigation based on nearest matching neural network[C]∥Proceedings of Cross-Strait Quad-Regional Radio Science and Wireless Technology Conference(CSQRWC),2013.Chengdu,China,21-25 July,2013:472-475.
[13]程力,張雅杰,蔡體菁. 重力輔助導(dǎo)航匹配區(qū)域選擇準(zhǔn)則[J].中國慣性技術(shù)學(xué)報,2007,15(5):559-563.
[14]王虎彪,許大欣. 重力垂直梯度數(shù)據(jù)地圖特征及其輔助導(dǎo)航[J].中國慣性技術(shù)學(xué)報,2010,18(1):93-96.
[15]吳華玲,徐效波,劉波.重力場可匹配區(qū)選擇研究[J].測繪科學(xué),2012,37(2):14-16,68.
[16]臧濤,笪良龍,楊廷武. 基于水下聲場信息的三維航路規(guī)劃研究[J].指揮控制與仿真,2008,30(6):37-40.
[17]儲廣風(fēng).雙波算法在水下潛器路徑規(guī)劃中的應(yīng)用[D]. 哈爾濱:哈爾濱工程大學(xué),2011.
[18]羅翔,陳戈,陳希真,等. 基于遺傳算法的自航水雷航路規(guī)劃[J].火力與指揮控制,2009,34(3):99-101.
[19]李奎星.基于信息熵遺傳算法的艦船導(dǎo)航路徑規(guī)劃技術(shù)研究[D]. 哈爾濱:哈爾濱工程大學(xué),2009.
[20]張莉,周偉達(dá),焦李成.核聚類算法[J].計算機(jī)學(xué)報,2002,25(6):587-590.
[21]Sch?lkopf B,Mika S,Burges C,et al. Input space versus feature space in kernel-based methods[J].IEEE Trans on Neural Networks,1999,10(5):1000-1017.
[22]Michalewicz Z,F(xiàn)ogel D B.如何求解問題:現(xiàn)代啟發(fā)式方法[M].曹宏慶,譯.北京:中國水利水電出版社,2003:81-84.
猜你喜歡
房地產(chǎn)導(dǎo)刊(2021年6期)2021-07-22 09:12:46
中國石油石化(2021年9期)2021-07-17 09:24:00
中國農(nóng)民合作社(2020年12期)2020-12-18 09:09:58
公民與法治(2020年11期)2020-07-25 02:02:06
河南水利年鑒(2020年0期)2020-06-09 05:43:30
領(lǐng)導(dǎo)決策信息(2018年50期)2018-02-22 06:17:16
商周刊(2017年5期)2017-08-22 03:35:26
制造技術(shù)與機(jī)床(2017年3期)2017-06-23 08:11:34
中國衛(wèi)生(2016年2期)2016-11-12 13:22:16
華東科技(2016年10期)2016-11-11 06:17:41