ZK4型電空轉轍機鎖閉性能改進探討
2014-05-09 12:48:32李維毅
鐵路通信信號工程技術 2014年2期
關鍵詞:動作
李維毅
(天津鐵路信號有限責任公司,天津 300300)
ZK 4型電空轉轍機是駝峰站場中被廣泛使用的快動型轉轍機。經過多年的使用和改進,ZK 4型轉轍機的穩定性和可靠性已經得到較大程度提高,目前在ZK 4型轉轍機的應用中存在主要問題仍然集中在鎖閉機構方面,即因鎖閉機構動作可靠性差而引起動作桿的卡阻,增加了站場的排故和維護工作量,對ZK 4型轉轍機的實際應用的產生了不利影響。
1 鎖閉機構的故障分析
1.1 ZK4型轉轍機的基本鎖閉機構原理
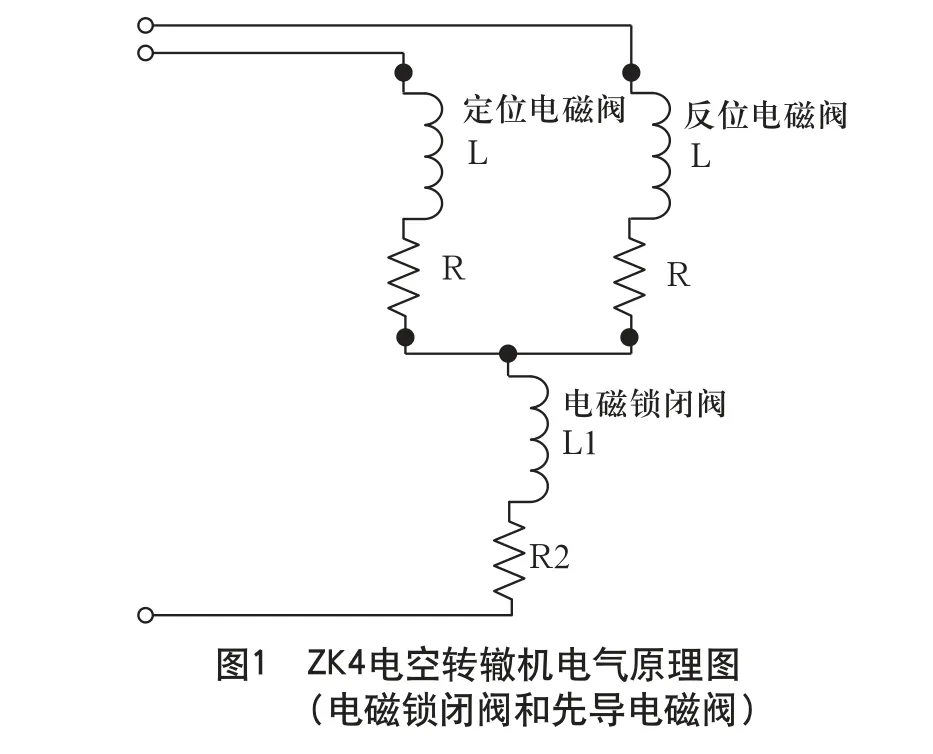
ZK 4型轉轍機屬快動型道岔轉換裝置。由于駝峰站場車輛溜放條件的限制,電空轉轍機需保證在0.6 s以內完成道岔轉換動作。為在保證鎖閉安全性的條件下提高響應速度,ZK 4型轉轍機基本鎖閉機構設計采用圖1所示先導閥和鎖閉閥線圈串聯的工作方式,這意味著他們將被同時通電,通過兩個線圈本身電性能的不同實現鎖閉閥芯先縮回,活塞桿后推出的順序控制。
基本型ZK 4型轉轍機電路中存在明顯的“競爭冒險”問題,即如果閥芯由于摩擦因數或電參數等原因未能在電氣參數允許的時間內收回,則會造成機械卡阻。而這種現象比較容易發生,比如安裝誤差導致鎖閉閥閥芯伸出收回不暢,或由于動作桿到位反彈或列車經過時引起劇烈震動均會對鎖閉閥閥芯產生巨大沖擊,這些都容易造成鎖閉閥閥芯的機械變形,從而很容易造成縮回不暢和活塞桿動作卡阻現象。
1.2 目前采用的鎖閉機構
為避免上述問題,采用鎖閉閥芯常態下依靠電磁力縮回閥體的設計。同時,為保證在氣源失效情況下的鎖閉安全,使用一對空氣開關對ZK 4型轉轍機的進氣氣壓進行檢測,一旦空氣壓力低于一定數值(0.4 M Pa),壓力開關便會斷開,鎖閉閥閥芯在閥體彈簧力的作用下伸出,對活塞桿起到鎖閉作用;如果供電電源發生失效,鎖閉閥閥芯同樣會伸出,實現對動作桿的鎖閉。
上述方法在保證鎖閉安全的情況下,很大程度上消除了鎖閉機構的卡阻問題,但在定位或反位動作開始時,需要大量壓縮氣體進入氣缸,必然導致進氣口壓力開關處氣壓急劇降低,很容易造成鎖閉閥閥芯的誤伸出動作,從而引起動作桿卡阻現象。為消除此類隱患,可以采取電氣和機械兩類方法進行校正補償,下面將針對這兩類校正方法進行分析。
1.3 鎖閉閥的電氣延時校正
根據本文1.2分析,在活塞運動開始階段,鎖閉閥的誤伸出是由于進口處氣壓短暫降低造成,為避免活塞的誤動作,可以采用電氣延時的辦法延遲鎖閉閥線圈的斷電時間,即當氣壓降低的瞬間,鎖閉閥線圈并不斷電,只有當進氣氣壓低于某設定值(0.4 M Pa)一段時間后,鎖閉閥線圈才斷電,從而避免因活塞桿運動開始階段氣壓的短暫降低而引起鎖閉閥的誤動作。
沈陽電務段曾采用并聯阻容元件的方法進行純電氣延時,但這種方法一方面因使用了巨大電解電容(2 200 u F)可能帶來較大的充電電流,給現有駝峰站場的供電系統帶來較大壓力;另一方面,由于ZK 4型轉轍機工作環境惡劣,對電解電容的使用壽命存在不利影響(電解電容的一般工作壽命僅為數千小時),長期看仍可能因電容元件的失效而使卡阻隱患復現。
2 改進措施
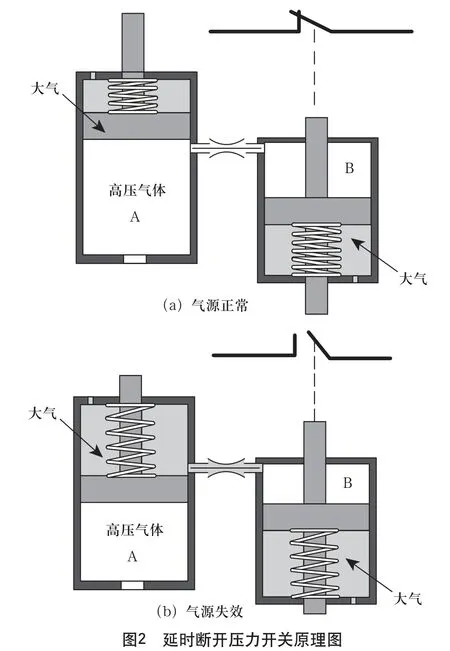
為實現長期可靠的電氣延時,將對空氣開關的結構進行重新設計,使空氣開關自身具備延時斷開的功能,改進后的空氣開關原理如圖2所示。
圖2中A腔與進氣口直接連通,延時壓力開關常閉觸點接入鎖閉閥線圈電路。當進氣氣源壓力正常時,A腔充滿高壓氣體,左側氣缸活塞在壓力作用下克服彈簧力向上運動,適當設計彈簧和氣缸結構參數,使氣壓高于0.45 M pa時,左側氣缸活塞位于節流閥開孔上側,從而使高壓氣體進入右側氣缸的B腔。右側氣缸活塞在高壓氣體作用下克服彈簧力向下運動,使開關處于常閉狀態,此時鎖閉閥線圈通電,閥芯縮回,解除對動作桿的鎖閉。
當進氣氣源壓力低于額定值(0.4 M Pa)時,A腔氣體壓力減小。在彈簧力作用下,左側氣缸活塞向下運動至節流閥開孔下方,從而使B腔通過節流閥與大氣連通,右側氣缸活塞在彈簧力的作用下向上運動,由于節流閥的作用,活塞的運動速度可以被控制,當活塞到達氣缸頂端時,常閉開關被打開,與此同時,鎖閉閥線圈斷電,鎖芯伸出,對動作桿形成鎖閉。適當調整節流閥的開度,可以控制右側氣缸活塞的運動時間,控制常閉開關的時延,保證動作桿運動開始階段進氣口氣壓降低不致引起鎖閉閥線圈的斷電,從而避免卡阻隱患。
3 結論
本文研究了ZK 4型電空轉轍機鎖閉系統的故障機理,介紹目前的常用解決方法及存在的不足之處,并提出新的解決思路,為進一步的設計改進提供原理依據。
猜你喜歡
作文周刊·小學一年級版(2022年16期)2022-05-07 11:28:30
作文周刊·小學一年級版(2021年8期)2021-07-07 11:00:47
動漫界·幼教365(大班)(2021年4期)2021-05-23 21:33:16
小學生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
少年博覽·小學低年級(2017年4期)2017-06-09 16:22:28
作文周刊·小學一年級版(2016年28期)2017-06-03 00:28:49
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
少兒科學周刊·少年版(2015年4期)2015-07-07 20:56:37
電影故事(2015年30期)2015-02-27 09:03:12
七彩語文·低年級(2014年10期)2015-01-14 14:46:27
