基于ADAMS的禽蛋吸運機械手仿真與分析
2014-05-11 03:10:02張興國
制造業自動化 2014年10期
關鍵詞:分析
張興國
(南通大學 機械工程學院,南通 226019)
基于ADAMS的禽蛋吸運機械手仿真與分析
張興國
(南通大學 機械工程學院,南通 226019)
0 引言
結合我國禽蛋生產企業分布廣、規模小等現狀,筆者設計完成一種占地面積小、適合于中小型禽蛋企業的禽蛋分揀系統,并就其中的禽蛋吸運分級機械手于本刊(見文獻[1])發表相關研究成果。為了確保機械手工作的安全性、穩定性,優化其軌跡規劃,基于ADAMS對該機械手進行了仿真分析研究。
1 禽蛋吸運分級機械手簡介
禽蛋吸運機械手采用關節式結構,圖1為其示意圖,設計有5個自由度,分別為:2個肩關節(J1、J2)、1個肘關節(J3)和2個腕關節(J4、J5)[1~3]。表1為設計參數。

圖1 禽蛋吸運機械手
2 禽蛋吸運機械手運動學分析
采用工業機器人分析中常用的D-H法建立禽蛋吸運機械手的連桿坐標系[4~6],如圖2所示。表2為各關節的轉角、扭角等參數。

表1 禽蛋吸運機械手設計參數

圖2 禽蛋吸運機械手關節坐標系
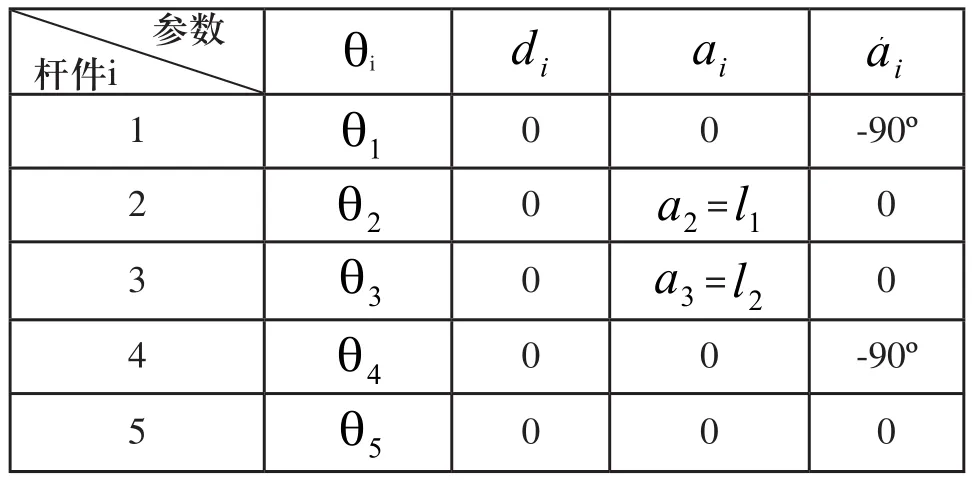
表2 禽蛋吸運分級機械手桿件參數和關節變量
2.1 運動學正問題

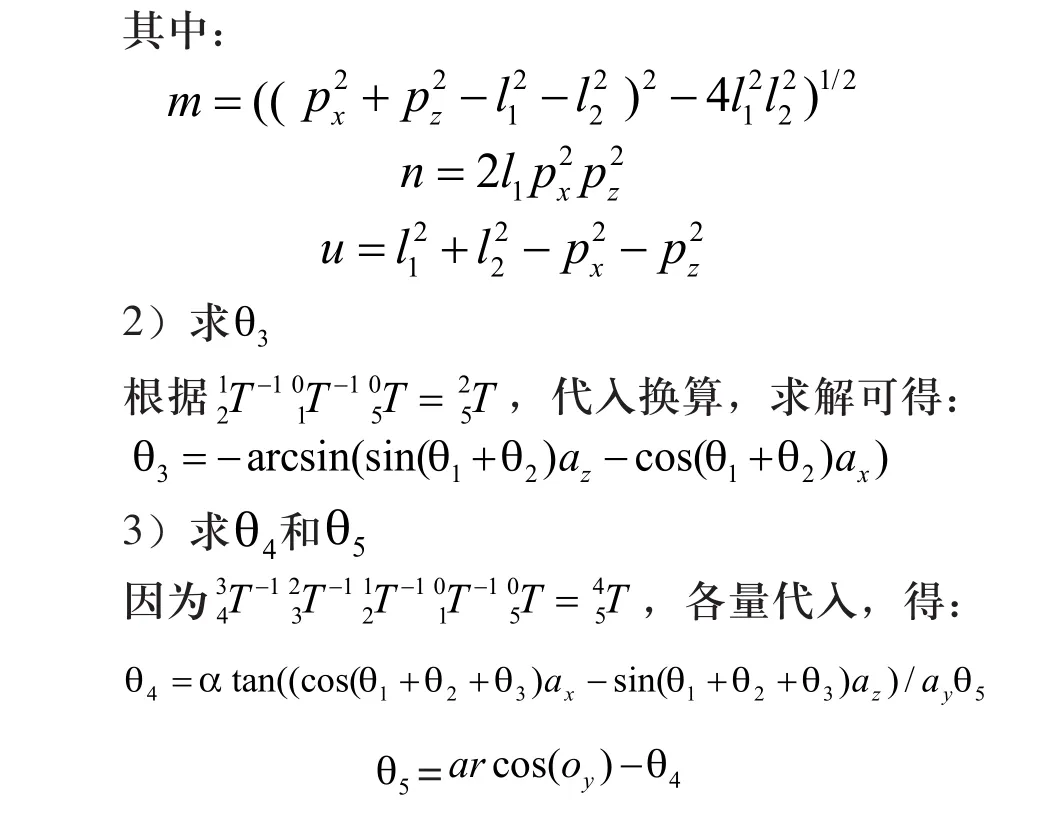
2.2 運動學逆問題

3 基于ADAMS的禽蛋吸運機械手三維建模
ADAMS是以計算多體動力學為基礎,包含多個專業模塊和領域的虛擬樣機開發系統軟件。可以建立復雜的運動學和動力學模型(包括剛性、柔性以及剛柔混合)。在產品的設計階段用ADAMS進行輔助分析,可以在制作樣機前對產品進行各種性能測試,大大降低研發成本,縮短開發周期[7]。
3.1 ADAMS建模的主要流程
對禽蛋吸運機械手的建模及分析,只用到了ADAMS的通用分析部分。主要包括實體模型建立、運動副添加、工作過程中阻尼的添加和驅動的選取。最后通過一系列運動學和動力學數據的輸出來判斷虛擬樣機的工作狀況,作為檢測標準的重要參考[8,9],具體的主要設計流程如圖3所示。

圖3 運用ADAMS設計流程
3.2 基于ADAMS的機械手建模
3.2.1 三維模型建立
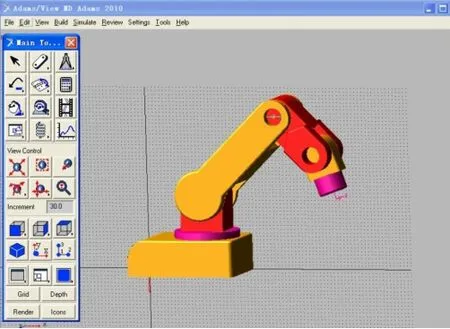
圖4 ADAMS中禽蛋吸運機械手三維模型
ADAMS/View中可以直接創建沒有質量信息的構造體,例如起輔助作用的點、線、坐標系等,同時也可以構建有質量信息的具體幾何實體。雖然其他三維造型軟件如SolidWorks、Proe等擁有強大的建模功能,也可用通用格式導入到ADAMS,但是由于受到通用性的限制,且經過實踐操證實導入操作得到的模型經常會出現位置、精度和尺寸變化不同等錯誤,所以采用了ADAMS的內部自帶工具進行菜單建模。
機械手主要包括底座、旋轉臺、大臂、小臂、手腕。由上述機械手運動學分析的結果為基礎,構建機械手對象。機械手可以視為連桿通過關節組合而來,相鄰桿件間的轉動或移動可以通過矩陣變換加以描述。圖4為在ADAMS中所建的機械手三維模型。
3.2.2 機械手剛體參數信息
ADAMS提供了豐富的建模工具集及各種布爾操作,并且可以對模型進行參數化修改,構建的編輯信息主要包括外觀、質量、初始位置和運動速度等。
表3中是分析得到的主要構件的質量和轉動慣量等信息。查閱大臂和小臂的相關信息,進行初步檢查,以確保材料、初始位置等相關參數設置的合理性和正確性。

表3 機械手的主要部件質量和轉動慣量
3.2.3 約束和驅動等相關設置
該禽蛋吸運機械手擁有5個轉動的自由度,底座固定于操作臺上進行工作。機械手只有5個轉動副可以運動,其中底座與轉動支架相連構成的轉動副的軸線與水平面垂直,手腕與吸附機構的組成的轉動副軸線方向是變動的,其他三個轉動副都是與水平線平行。
1)驅動的添加:機械手的5個關節各有一個轉動副,都由不同型號電機作為驅動,進行運動的仿真時驅動的添加是首要環節,也是保證機械運動符合預期要求的關鍵步驟,具體的各個關節定義如表4所示。

表4 各轉動關節定義
本文通過各個關節的軌跡數據在ADAMS中生成關節轉角的樣條曲線,將曲線參數通過CUBSPL引用樣條曲線函數,添加至相應的關節位置作為驅動。其采用的是標準的三次樣條差值來計算,所以得到的結果更容易收斂。此處仿真的運動軌跡模擬了一次完整的從禽蛋吸取到放置的過程。
2)角度范圍傳感器的添加:根據表1中的各個關節可以活動的范圍,為保證機械手臂在運動過程中不會超過預定的角度,要對各關節轉角添加角度傳感器。添加的角度傳感器可測量關節的轉動角度,并當運動角度達到預定值時,轉動副運動將會受限,且暫時停止仿真,從而避免仿真失真及后期的規劃錯誤。
底座旋轉支架和手腕部分的吸附機構旋轉,可不進行限制,所以此處只添加3個角度傳感器,分別是大臂關節轉角、小臂的關節轉角和手腕位置的關節轉角,具體信息如表5所示。

表5 傳感器角度設置
3)關節阻尼的添加:機械手在運動過程中會產生各種摩擦,所以在完成運動副的設置以后,要在關節處添加摩擦以確保仿真的可靠性。綜合其他類似設計經驗,此處各個關節設計的最大靜摩擦系數為0.5,并用同樣的方法添加其他位置的摩擦力。
4)檢驗樣機模型:完成上述步驟后,開始分析前還要對構件的虛擬樣機進行最后的檢驗,來排除其中可能存在的一些錯誤,例如連接約束不當、裝配錯誤、構件未添加質量信息等,保證仿真的順利進行。
4 基于ADAMS的機械手仿真與分析
機器人的軌跡規劃是研究末端執行器工作過程中在空間內所經歷的連續軌跡變化狀態,主要從兩個角度討論,一是研究末端位置的空間直角坐標變換,另一種是研究關節轉角的變換情況。這里主要討論的是后一種情況。
4.1 ADAMS的機械手仿真與分析
在已經建立好的ADAMS機械手三維模型基礎上,完成相關仿真參數設置,然后將關節轉角參數導入至各個對應的關節進行驅動的設置,以實現機械手的正運動學與動力學分析。
Prostprocess作為ADAMS的后處理模塊,不僅可輸出質量、尺寸和受力等靜態信息。同時也可顯示仿真動畫,并輸出速度、加速度、坐標軌跡和力矩等結果,以方便于將仿真結果與理論計算進行對照和驗證。圖5為機械手運動過程仿真圖,圖6~圖11為機械手的部分仿真分析結果。

圖5 ADAMS內機械手運動過程仿真

圖6 末端執行器(吸盤)的坐標變化曲線

圖7 末端執行器(吸盤)的速度變化曲線
由圖6和圖7中可見,末端軌跡在三個坐標上的變化都比較平穩,沒有出現較大的波動和震蕩。并且末端在各坐標上的速度分量也變化緩慢,符合吸附裝置在運送蛋的過程中對速度的要求,不會使得禽蛋因為振動而墜落,整體符合要求。
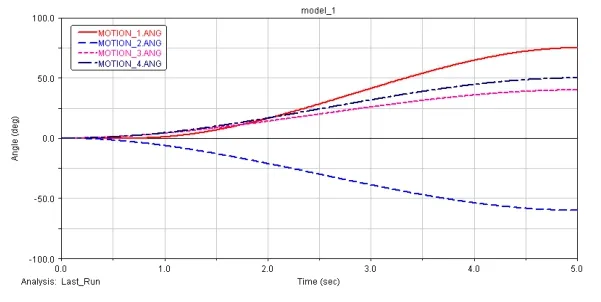
圖8 各關節轉角變化曲線
而對于圖8中的各關節轉角變化曲線,可見其變化規律與驅動的添加規律相符合,說明機械手各關節的轉動都在相應角度傳感器的范圍以內,沒有超出角度要求,符合設計要求,否則會出現檢測的結果角度與添加不同的仿真報警。

圖9 大臂電機轉矩變化曲線
圖9為機械手大臂電機轉矩變化曲線,可見大臂驅動力矩由大變小,最大值約為530Nm,小于結構設計中電機選型時理論最大值。大臂轉矩從大至小變化,是由于大臂初始位置與水平方向夾角小接近平行,此時大臂受到小臂和末端負載的負載力矩大。當機臂吸附起禽蛋后,手臂向上抬起過程中,大臂與水平方向夾角增大。夾角增大使得小臂對大臂與機身連接處的作用力臂減小,因而力矩減少。
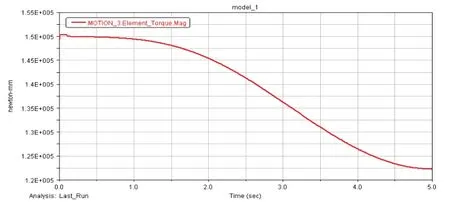
圖10 小臂電機轉矩變化曲線
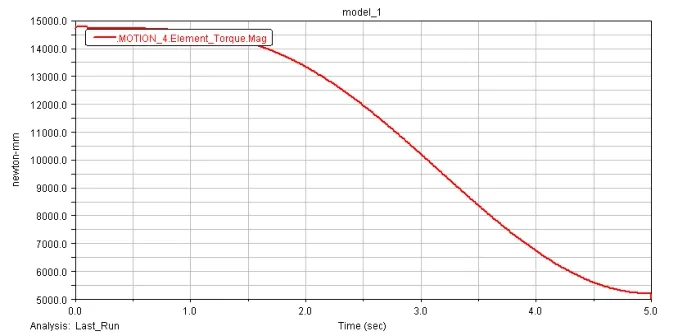
圖11 手腕電機轉矩變化曲線
小臂在仿真過程的驅動力矩變化規律與大臂相似,具體如圖10所示,從圖中可知最大值為134Nm,也小于小臂電機理論最大值,符合預期要求。
圖11中,手腕驅動關節的最大力矩約為14.8Nm,略大于電機選型時的計算值14.4Nm,此關節的電機選型基本滿足。
5 結束語
在簡要介紹禽蛋吸運機械手結構基礎上,完成了連桿坐標系建立、運動學問題分析等工作。結合機械手參數,在ADAMS中構建機械手三維模型,并實現機械手的運行過程仿真,得到相關位移、速度、力矩等信息和工作狀態,經與理論值對比分析,以驗證機械手臂設計的正確性,及時發現不足之處予以改正,同時也為后續運動控制及機器人路徑規劃提供模型,從而更好發揮該機械手的工作性能。
[1]張興國,倪遠征,張磊.禽蛋吸運分級機械手設計及研究[J].制造業自動化,2011(7):1-4,53.
[2]馬香峰.工業機器人的操作機設計[M].北京:冶金工業出版社,1996.
[3]吳振彪.工業機器人[M].武漢:華中理工大學出版社,2006.
[4]張興國.環保壓縮機裝配機器人的運動學分析[J].南通大學學報(自然科學版),2004(1):32-34,38.
[5]張興國,徐海黎.FANUC M-6iB型工業機器人結構及運動學分析[J].南通大學學報(自然科學版),2009(1):9-12.
[6]周東健,張興國,馬海波,等.基于柵格地圖-蟻群算法的機器人最優路徑規劃[J].南通大學學報(自然科學版),2013,12(4):82-86.
[7]李增剛.ADAMS入門詳解與實例[M].北京國防工業出版社,2010.
[8]偉光,劉建華.基于ADAMS的工業機器人大臂運動關節分析[J].機械與電子,2010,(5):67-69.
[9]郁飛鵬,賈鴻社.ADAMS與UH、SolidWorks的數據交換實踐[J].現代制造工程,2005,(10):37-39.
simulation and analysis of grading robot for eggs suction and transportation based on ADAMs
ZHANG Xing-guo
在簡要介紹禽蛋吸運機械手結構基礎上,完成了連桿坐標系建立、運動學問題分析等工作。結合機械手參數,在ADAMS中構建機械手三維模型,并實現機械手的運行過程仿真,得到相關位移、速度、力矩等信息和工作狀態,經與理論值對比分析,以驗證機械手臂設計的正確性,及時發現不足之處予以改正,也為后續運動控制及機器人路徑規劃提供模型。
吸運機械手;禽蛋分級;坐標系;運動學方程;ADAMS;仿真與分析
張興國(1975 -),男,江蘇沭陽人,副教授,碩士,主要從事光機電一體化及機器人技術方面的教學和科研工作。
TP242
A
1009-0134(2014)05(下)-0123-05
10.3969/j.issn.1009-0134.2014.05(下).35
2014-01-24
江蘇省自然科學基金面上項目(BK20131205)
猜你喜歡
現代畜牧科技(2021年9期)2021-10-13 06:39:14
民用飛機設計與研究(2020年4期)2021-01-21 09:15:02
電子制作(2018年18期)2018-11-14 01:48:24
山東工業技術(2016年15期)2016-12-01 05:31:22
當代經濟研究(2016年5期)2016-12-01 03:12:05
現代農業(2016年5期)2016-02-28 18:42:46
出版與印刷(2016年3期)2016-02-02 01:20:11
中國中醫藥現代遠程教育(2014年11期)2014-08-08 13:23:44
華北水利水電大學學報(社會科學版)(2014年3期)2014-04-16 04:38:31
終身教育研究(2014年5期)2014-02-28 01:23:06
