風力機組變槳機構在變風速下的動力學聯合仿真分析
2014-06-27 05:46:35李祥雨孫文磊劉國良
重慶理工大學學報(自然科學) 2014年6期
李祥雨,孫文磊,劉國良
(新疆大學機械工程學院,烏魯木齊 830047)
風力機組變槳機構在變風速下的動力學聯合仿真分析
李祥雨,孫文磊,劉國良
(新疆大學機械工程學院,烏魯木齊 830047)
為了更加準確地對變槳機構進行分析,從模擬其復雜工作運行狀況入手,在Simulink中建立了變槳機構運行的數學控制模型,在UG中建立了變槳機構三維實體運動模型。借助兩軟件的聯合仿真實現兩模塊的同步數據交換,解決了變風速下變槳機構調節運行的問題,達到了變槳的重要目的——穩定吸收風能。通過模擬得到了機構在運行條件下的動力學特性,為進一步的設計和優化奠定基礎,同時提供了一種模擬機構工作運行性能的方法。
變槳機構;聯合仿真;動力學特性
隨著經濟的發展,人們對不可再生資源的利用不斷增加,使其面臨著枯竭的危險。因此,對風能、太陽能等可再生資源的利用越來越受到關注,尤其是對風能的利用。在將風能轉化為電能的過程中,風速是隨時變化的。變槳機構是風能發電機捕獲最大風能并保證輸出功率穩定的主要機構。本文首先對變槳機構的原理和運行狀況進行分析,然后建立風速仿真的Simulink模型進行變風速下的聯合仿真。為了準確計算風力機的動力特性,本文不僅模擬了風機的理想工況,而且根據變槳控制理論,借助聯合仿真模擬其在外部風載荷輸入下的實際運行狀態,在滿足其復雜運行狀態下得到機構載荷與外部風載的關系,為變槳機構的設計提供數據支持。本文借助UG對二維或三維模型進行復雜的靜力學、運動學和動力學分析,并借助UG和Simulink聯合仿真來控制變槳執行機構模型的運動,同時將機構模型產生的變槳信號實時反饋到控制模型中,模擬驗證變槳機構的工作性能。
1 變槳執行機構原理和運動分析
1.1 變槳執行機構的模型及原理
目前,在大型風力機中,采用的風力機組變槳距控制方案主要有2種[1],即電機控制和液壓控制。其中液壓執行機構又有多種形式,其中以曲柄連桿和曲柄滑塊的應用最為廣泛[2]。本文根據兆瓦級變槳機構的相關參數建立其三維實體模型及變槳機構原理圖(該機構由偏心曲柄滑塊機構和擺桿機構合成),如圖1、2所示。由變槳原理圖2知:當控制油缸沿著導向桿運動時,帶動搖桿運動,此時安全油缸啟動;當安全油缸運動時,直接帶動槳葉變槳,而控制油缸不動。變槳機構的運動簡而言之就是控制油缸和安全油缸相結合的運動。
1.2 變槳執行機構的運動分析
在UG運功仿真模塊中,首先根據其運動原理設置桿件和運動副;然后設置運動條件,即槳葉盤的反向力矩為2 100 N·m[3]。該機構有2個動力源,且運動有先后,為了完成在不同時刻的先后運動,運用Step函數驅動完成不同時刻的聯動。在0~5 s控制油缸完成最大行程運動,在5~10 s安全油缸完成最大行程運動,其運動曲線如圖3所示。從圖3可以看出:控制油缸在Step函數驅動后5 s達到最大行程265 mm(如圖3中的實線所示),而安全油缸在Step函數驅動后10 s達到最大行程280 mm(如圖3中的虛線所示)。
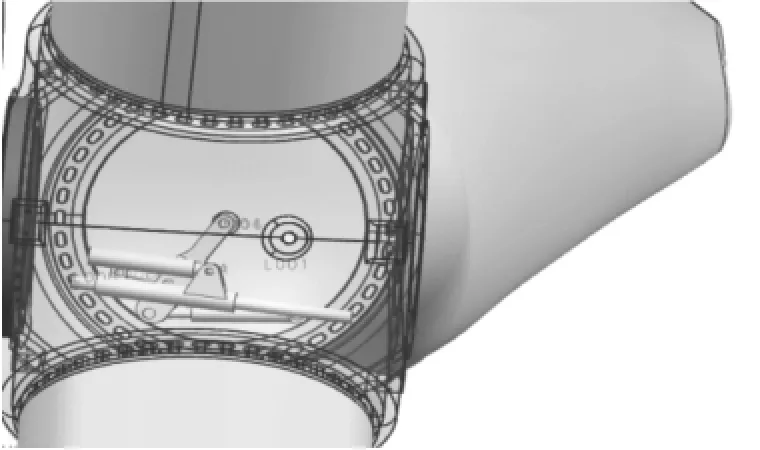
圖1 變槳機構三維實體模型
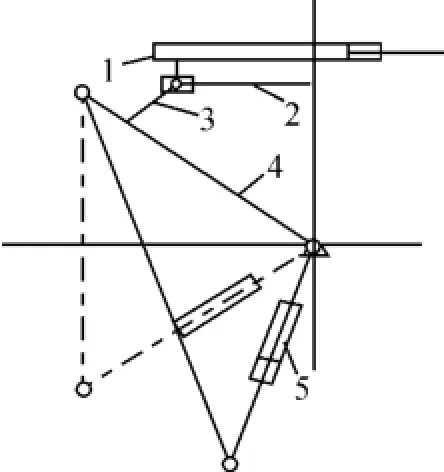
圖2 變槳機構原理
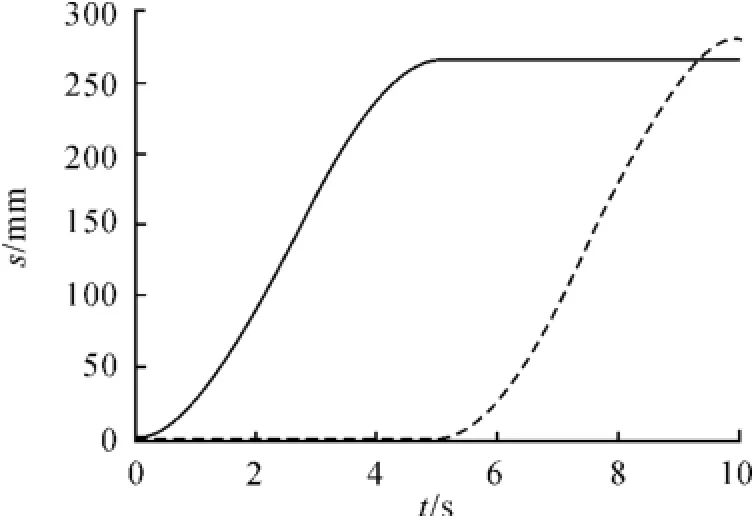
圖3 液壓缸的位移曲線
風力發電機組變槳機構的運動概括為:控制油缸先動,待其運動到最大行程時安全油缸才啟動,兩者結合起來共同完成變槳的全過程。將仿真分析結果導出到Excel中并作圖,在兩油缸聯動控制下,最終得到葉片的變槳位移β曲線。液壓缸的位移曲線和槳距角的位移曲線如圖3、4所示。
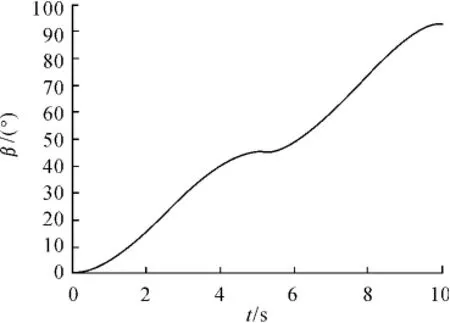
圖4 槳距角位移曲線
由圖2(變槳機構原理)知:控制油缸在0~5 s內到達最大行程,此時槳距角由0°變為45°;而后安全油缸啟動,在5~10 s內達到最大行程,此時槳距角由45°變為90°。由圖4可知:控制油缸和安全油缸的聯合運動滿足該變槳機構的設計要求和使用要求。
2 風速的模擬
風速決定和影響風輪的特性,變化的風速直接影響風機的前期設計和后期運行,因此搭建正確的風速模型至關重要。為了更好地研究變槳機構的調控特性,將變槳機構置于大于額定風速的情況下工作。
本研究沿用國內外使用較多的組合風速模型。為了更加逼近真實風速,模擬風速設置為3個組成部分:基本風、漸變風和隨機風[4]。在建立數學模型之后,在Simulink中進行仿真分析,并建立風速仿真的Simulink模型,如圖5所示。
仿真時,設定基本風速為12 m/s。漸變風的開始時間即為仿真的開始時間,結束時間為14 s,最大值設定為8 m/s。隨機風的取值范圍小于1 m/s。采樣時間(即Sample time的取值)為0.05 s。整體的仿真時間為14 s。仿真結果如圖6所示。
由圖6可知:在0~5 s內,漸變風由12 m/s增加到20 m/s;在5~9 s內,風速維持在20 m/s左右;在9~12 s內,漸變風由20 m/s減小到12m/s;在12~14 s內,風速維持在12 m/s左右。
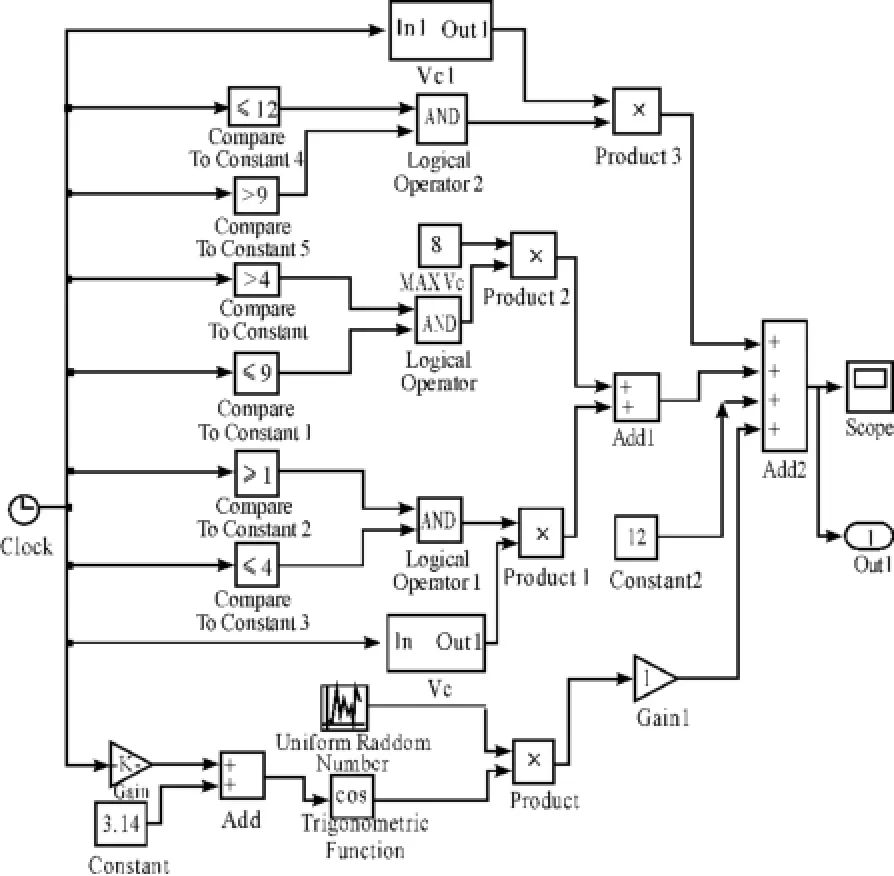
圖5 風速仿真的Simulink模型
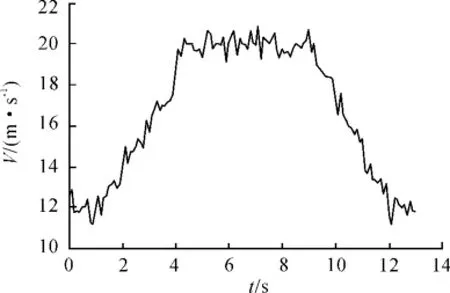
圖6 風速仿真
3 變風速下的聯合仿真
風輪機以風作為原動力,風速直接決定了風輪機模擬過程的動態特性。風速模型不僅用于資源規劃中以評價風電的經濟性、持久性以及含風電場的電力系統的可靠性[5],而且還用于實現風能的最大捕獲,達到輸出穩定功率的目的。
風力機吸收風能的利用系數Cp與槳距角、風速、風輪的轉速有關。根據有關資料[6],利用系數Cp可表示為

其他相關公式如下:
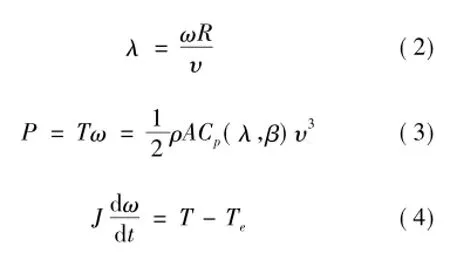
式(1)~(4)中:P為風輪吸收風能功率;T為風輪的氣動扭矩;ρ為空氣密度;Cp為功率利用系數;λ為葉尖速比;β為葉片的槳距角;ν為風速;R為風輪的半徑;ω為風輪的轉速;J為風輪的轉動慣量;Te為發電機的反向力矩。
由式(1)可得風力特性曲線(見圖7)。由圖7可知:當槳距角β固定時,存在唯一的風能利用系數最大值Cpmax;當槳距角β=00時,風能利用系數Cp相對最大;隨著槳距角β的增大,風能利用系數Cp相對明顯減小。當風速高于額定風速時,如果固定槳距角,風機吸收的風能會高于額定功率,并隨風速的增加而持續增加,這樣會使載荷過大,產生不良后果。為此,變槳機構在風速高于額定風
速時會通過調節槳距角β值來穩定風能。

圖7 風力特性曲線
以風速為輸入信號,變風速會影響到風機風能的吸收。當風速在額定風速以上變化時,需要通過變槳系統的調節來維持風能的穩定。為了模擬變槳機構對風能的調節,借助UG和Simulink進行聯合仿真,仿真模型如圖8所示。仿真模型主要由風能吸收模塊、PID變槳控制模塊、NXMotion-PlantBlock模塊組成。當輸入變風速時,通過調節PID變槳控制模塊得到理想槳距角β,從而使Cp產生相應的變化,最終實現輸出功率的穩定。
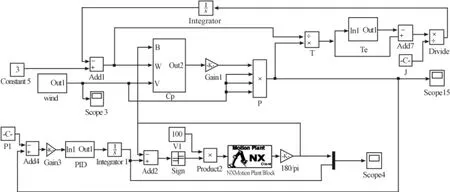
圖8 聯合仿真模型
4 機構動力學分析
在UG運動仿真中生成變槳動畫,其運動形式為隨風速變化的往復運動。由圖9可以看出:在液壓缸運動的過程中,控制油缸的位移在0~4 s內呈逐漸增大的趨勢。這是由于風速在此時段內上升很快,由變槳理論可知此時應通過增加槳距角β來穩定風能。Simulink外部控制器通過使UG模型中油缸位移的增加來實現槳距角的增加。由圖10可以看出:在控制油缸作用下,槳距角很好控制。在油缸推動桿件運動過程中,機構的受力與風載荷有密切的聯系。由圖11、12可看出:在4~9 s內風載荷比較穩定,控制油缸的位移保持不變,Simulink外部控制器使UG模型中控制油缸的位移維持在70 mm左右,從而實現槳距角基本不變。對應UG中輸出的實際槳距角由圖10可以看出,此時槳距角維持在12°左右,機構所受到的力矩和力也維持在某一常數附近。由圖11、12可以看出:在9~12 s內風載荷快速下降,由變槳理論可知此時應通過減小槳距角β來穩定風能。

圖9 控制油缸的位移s變化
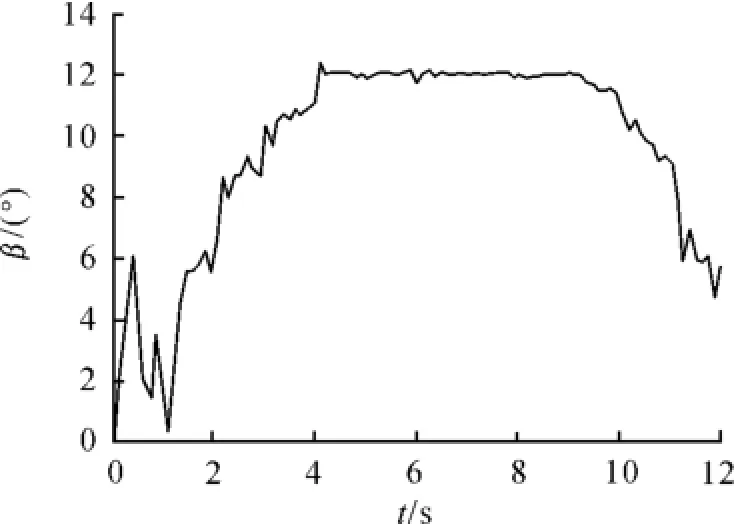
圖10 槳距角β變化
Simulink外部控制器通過使UG模型中油缸位移減小來減小槳距角,對應UG中輸出的實際槳距角由圖10可以看出。油缸運動的過程中,機構受力增大,但位移迅速減小,從而導致機構所受力矩減小,這由圖11、12可以看出。
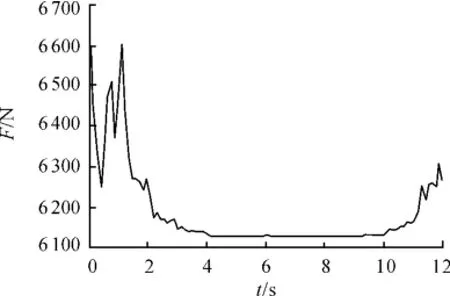
圖12 控制油缸受力F變化情況
由此可以斷定,在UG中生成變槳動畫,可以觀察變槳執行機構的運動情況,符合實際情況,且機構運行穩定。在變槳機構調節下,風能功率輸出穩定,可以滿足工況需求,同時也驗證了機構具有優良的工作性能。
5 結束語
本文研究了變槳機構的三維模型和運動原理,通過運動分析驗證了該機構性能的穩定性。根據實際需要,在基于Simulink模型的基礎上完成了風速模擬仿真。搭建了整機Simulink控制系統,結合UG運動仿真模塊完成了變槳機構的聯合仿真。為了準確計算風力機的動力學,本文不僅模擬風機的理想工況,而且根據變槳控制理論,借助聯合仿真模擬其在外部風載荷輸入下的實際運行狀態,為變槳機構的設計提供數據支持。本文借助UG運動仿真軟件對二維或三維模型進行復雜的靜力學、運動學和動力學分析。結果表明:該機構在變風速下起到了調節風載荷及穩定風能吸收的目的,同時提供了一種模擬機構工作性能的方法。
[1]Xing Z X,Chen L.The comparison of several variablespeed wind generation set construction[C]//The Second China International Renewable Energy Conference.Beijing:[s.n.],2005:361-369.
[2]戴贇.大型風力機變槳距控制研究[D].上海:上海交通大學,2008:24-28.
[3]李強,姚興佳,陳雷.兆瓦級風電機組變槳距機構分析[J].沈陽工業大學學報,2004(26):164-168.
[4]李丹娜.風輪輸出特性模擬實驗平臺的設計與研究[D].沈陽:沈陽工業大學,2007(3):10-24.
[5]Maureen H M,Balas M J.Non-linear and linear model based controller design for variable-speed wind turbine[J].3rd ASM E/JSM E Joint Fluids Engineering conference,1999(7):18-23.
[6]林勇剛.大型風力機變槳距控制技術研究[D].杭州:浙江大學,2005:15-17.
(責任編輯 劉舸)
Combined Simulation of the Dynamic Wind Turbine Pitch Mechanism under Variable Wind Speeds
LI Xiang-yu,SUN Wen-lei,LIU Guo-liang
(School of Mechanical Engineering,Xinjiang University,Urumqi 830047,China)
In order to more accurately analyze the pitch mechanism,this paper started the research from the simulation of its complicated work condition,and then established the mathematical control model and the three-dimensional entity model of its operational process in Simulink and UG.By means of the combination of the two software simulation,we realized two modules’data exchange synchronously,and the regulating operation of pitch mechanism under the variable wind speed.Meanwhile,it achieves the important purpose of pitch-absorb wind energy stability.Dynamics characteristic is obtained by simulating in the condition of mechanism operation.It provides the basis for the further design and control optimization,and at the same time provides a simulation method for the working performance of mechanism.
pitch mechanism;joint simulation method;dynamics characteristic
TH 113;TM614
A
1674-8425(2014)06-0048-05
10.3969/j.issn.1674-8425(z).2014.06.009
2014-02-15
國家自然科學基金資助項目(51065026);新疆維吾爾自治區自然科學基金資助項目(2011211A002);高等學校博士學科點專項科研基金資助項目(20106501110002)
李祥雨(1985—),男,山東菏澤人,碩士研究生,主要從事數字化設計與制造研究;通訊作者孫文磊(1962—),男,新疆奎屯人,教授,博士生導師,主要從事數字化設計與制造研究。
李祥雨,孫文磊,劉國良.風力機組變槳機構在變風速下的動力學聯合仿真分析[J].重慶理工大學學報:自然科學版,2014(6):48-52.
format:LI Xiang-yu,SUN Wen-lei,LIU Guo-liang.Combined Simulation of the Dynamic Wind Turbine Pitch Mechanism under Variable Wind Speeds[J].Journal of Chongqing University of Technology:Natural Science,2014(6):48-52.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
電機與控制應用(2021年12期)2021-02-28 07:55:52
海洋通報(2020年5期)2021-01-14 09:26:54
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
光學精密工程(2016年6期)2016-11-07 09:07:19
西南交通大學學報(2016年4期)2016-06-15 20:29:37
核科學與工程(2015年4期)2015-09-26 11:59:03
電測與儀表(2015年8期)2015-04-09 11:50:06
電機與控制應用(2015年7期)2015-03-01 03:50:15