基于Power PC與FPGA的雷達天線遠程操控系統設計實現
2014-07-05 05:24:06陳煒浩王金寧陳雪峰
江蘇科技信息 2014年14期
陳煒浩,王金寧,陳雪峰
(中國電子科技集團公司第二十八研究所,江蘇南京 210007)
1 應用背景
某雷達將需要的雷達信號通過網絡送至遠程顯控臺,并在遠程顯控臺對雷達進行遠程操控,如圖1所示。
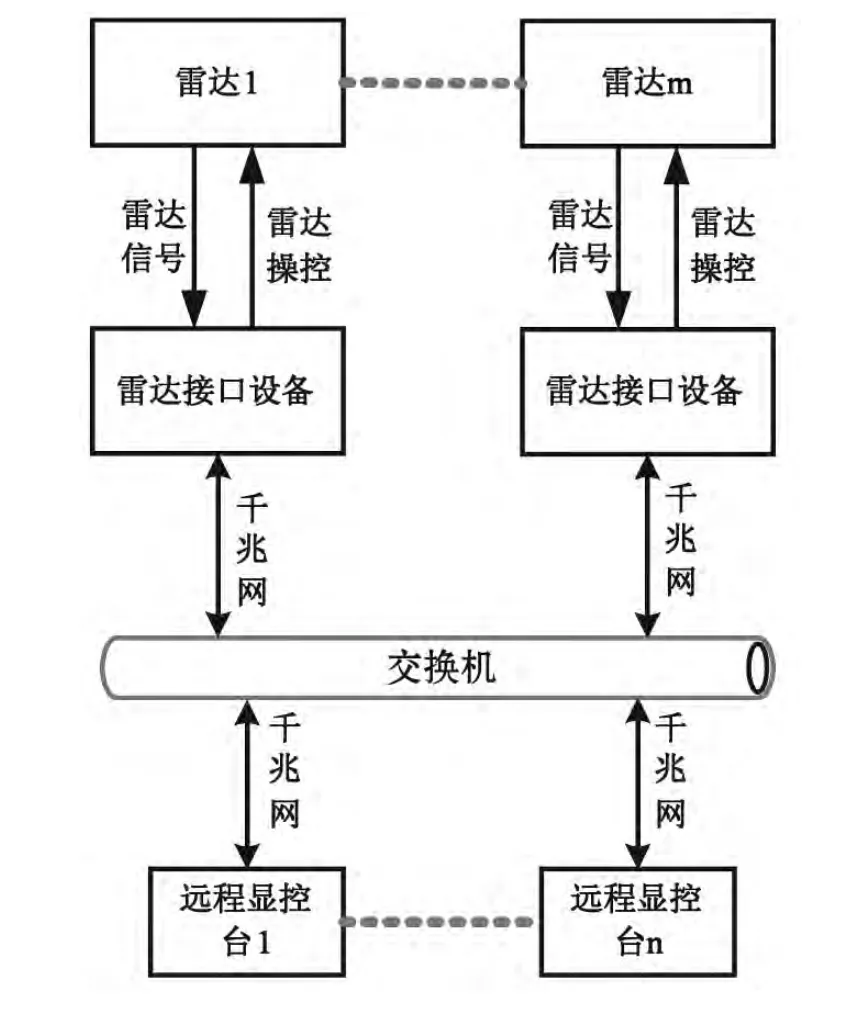
圖1 雷達遠程操控系統示意圖
在雷達實際使用過程中,雷達操作員經常會在雷達“手控”模式下,使用手輪操控雷達天線來回反復掃描某個目標,觀察目標回波的波形,對目標屬性進行判斷,如果手輪轉動與雷達天線轉動有較大延遲,會造成操作員手眼不協調,影響目標屬性的判斷。
2 延遲的產生
在遠程操控系統中,雷達操控臺位定時輸出在該時間段內手輪轉動的脈沖數,雷達接口設備接收到脈沖數后還原為手輪脈沖信號控制雷達天線。
從手輪轉動到天線轉動的延遲主要由以下幾方面產生,如圖2所示。

圖2 信號延遲示意圖
DELAY1為遠程顯控臺從搖動手輪到輸出網絡報文的延遲,在實際的工作中DELAY1約為50ms;DELAY2為網絡傳輸延遲,一般要求DELAY2小于2ms;DELAY3為雷達接口設備從接收網絡報文到輸出手輪信號的延遲;
DELAY4為雷達設計時從收到手輪信號到天線轉動固定的機械延遲(DELAY4約100~200ms,操作員已經適應了該延遲);
本文主要針對DELAY3,設計雷達接口設備,在收到遙控終端送來的網絡數據后,以很小的DELAY4延遲生成天線所需的信號。
3 方案設計
雷達天線的操控信號為AB相信號,如圖3所示。A相位超前為正轉,B相位超前為反轉。雷達接口設備需要將網絡數據轉換為AB相信號,以實現雷達天線系統的遠程操作控制。

圖3 手輪輸出波形
為實現較小的延遲,選擇具有較強通信能力的PowerPC作處理器,系統采用嵌入式Linux操作系統,結合FPGA進行設計。PowerPC模塊主要接收網絡送來的脈沖數,解析后通過LocalBus寫入到FPGA的寄存器中,FPGA接收到脈沖數后進行處理輸出AB相信號,如圖4所示。
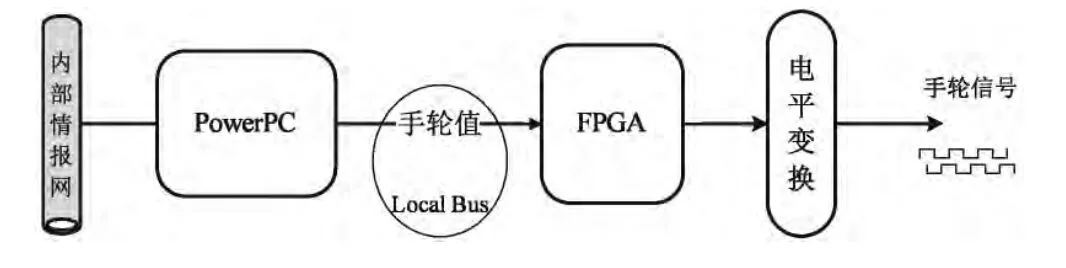
圖4 雷達接口設備信號流程圖
4PowerPC系統設計
4.1 硬件設計
PowerPC處理器選用Freescale公司的MPC8377E[1],該處理器集成e300c4處理器核,片內具有32Kbytes的指令cache和32Kbytes的數據cache,工作主頻可達800Mhz。MPC8377E可以支持2GB DDR2內存。MPC8377E的本地LocalBus總線擴展一片NOR FLASH作為系統的存儲空間。其作用是用來存儲bootloader、操作系統內核、文件系統。通過88E1111網絡芯片接入千兆光以太網(見圖5)。

圖5 PowerPC硬件系統架構
4.2 軟件設計
PowerPC處理器運行遠程操控控制程序和LocalBus總線驅動程序,遠程操控控制程序通過網路接收雷達天線遠程操控命令,對命令進行解析翻譯,根據命令類型將操控命令通過LocalBus總線驅動程序向FPGA的相應寄存器寫入控制命令。
LocalBus總線驅動程序實現主從設備號申請、設備注冊、FPGA地址功能映射、設備硬件控制等功能[2]。Linux內核通過一個file_operations結構體組織對設備操作的具體實現函數,該驅動在設備注冊時實現FPGA地址功能映射,通過file_operations結構體中fpga_write函數實現用戶層內核層數據交互和FPGA數據寫入[3]。
LocalBus配置為通用片選機制(GPCM),向FPGA寫入手輪值,LocalBus寫時序如圖6所示。其中參數tWC,tAWCS,tCSWP,tAWE,tWEN可以由軟件進行靈活配置,時序簡單,易于FPGA設計實現。
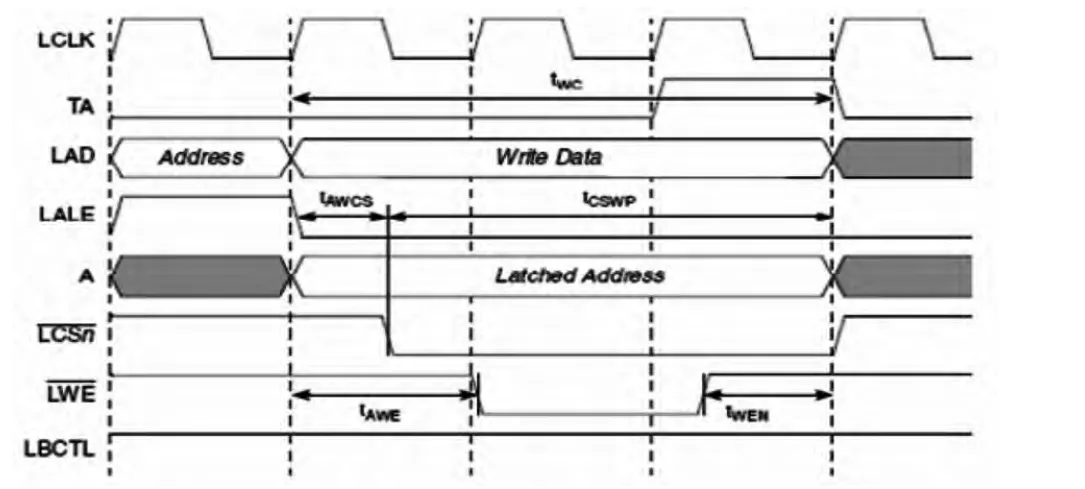
圖6 LocalBus寫時序
5 FPGA設計
FPGA 采用 Altera 公司 Straix系列的 EP1S25[4],PowerPC 將脈沖數寫入到FPGA后,FPGA按照LocalBus寫時序解析出手輪脈沖個數值,開始生成AB相信號。流程如圖7所示。
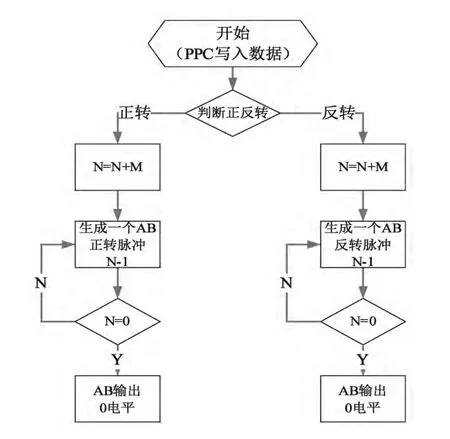
圖7 FPGA手輪波形產生流程圖
(1)FPGA解析出新的手輪脈沖值后,判斷手輪是正轉或反轉;
(2)將脈沖值與N相加(N為還需要產生的脈沖個數);
(3)生成一個固定脈沖寬度、固定相位差的AB信號,每產生一次脈沖信號,N-1,直至N=0;
(4)AB輸出0電平。
輸入輸出波形如圖8所示。
6 實踐與應用
經過實際測試,在輸出AB相脈沖寬度4ms時,雷達接口設備從接收到網絡信號到輸出的延遲小于5ms,其中PowerPC從網絡接收到LocalBus輸出延遲小于3ms,FPGA從收到PowerPC寫入數據到輸出波形延遲最大約2ms。充分體現了嵌入式系統和FPGA的實時性優勢。
本設計已經進行了實踐及應用,經過長時間、大范圍的使用,功能穩定,運行良好,在以后的工程應用中具備推廣前景。

圖8 FPGA手輪波形產生波形圖
[1]Freescale Semiconductor.MPC8377EPowerQUICCTMII Pro ProcessorHardware Specifications[EB/OL].www.freescale.com.
[2]Jonathan Corbet,Alessandro Rubini&Greg Kroah-Hartman.LINUX設備驅動程序[M].魏永明,耿岳,鐘書毅,譯.3版.北京:中國電力出版社,2009.
[3]Daniel P.Bovet&Marco Cesati著.深入理解LINUX內核[M].陳莉君,張瓊聲,張宏偉,譯.3版.北京:中國電力出版社,2009.
[4]Altera Corporation.Stratix Device Handbook[EB/OL].www.altera.com.
猜你喜歡
中國特種設備安全(2022年6期)2022-09-20 02:52:28
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
經濟技術協作信息(2018年22期)2019-01-19 03:00:18
電子制作(2018年11期)2018-08-04 03:26:08
工業設計(2016年12期)2016-04-16 02:52:00
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
設備管理與維修(2015年12期)2015-04-09 06:57:00
