多約束在線高斯偽譜末制導方法
2014-08-28 02:49:26鄭宗貴陳萬春
彈道學報 2014年3期
楊 良,鄭宗貴,徐 衡,陳萬春,周 浩
(1.北京航空航天大學 宇航學院,北京 100191;2.第二炮兵裝備研究院,北京 100085;3.北京空天技術研究所,北京 100074)
高超聲速飛行器在低層稠密大氣中的飛行環境特別惡劣,因此,需要設計滿足多約束要求的末段制導方法。要實現對終端落點和落角的控制,對動力學方程進行線化后的制導律能很好地滿足要求[1-3]。然而對于終端速度,由于其非線性較強,無法線性化,控制相當困難。對此,趙漢元提出了調節攻角的速度控制制導律[4],但該制導律需要飛行器進行快速滾轉運動,對于多類飛行器而言并不適用。
近年來,數值方法和計算機技術的發展大大提高了求解非線性最優控制問題的速度。偽譜法[5-6]就是其中一種。Ross I通過勒讓德偽譜法提出了一種基于時鐘序列保持的偽譜反饋制導策略,并進行了衛星控制和再入制導的在線反饋研究[7-8]。崔鋒通過勒讓德偽譜法也進行了再入制導的在線反饋研究[9]。偽譜反饋為終端多約束問題尤其是終端速度控制提供了一種很好的求解方法。
本文進行了在線高斯偽譜的反饋方法研究,建立了高斯偽譜法的初值猜測策略,并應用于高超聲速飛行器的末段飛行,成功實現了對落角、落速的控制,在無反饋信息的最后一個制導周期引入比例導引方法[10]保證落點精度。蒙特卡羅打靶實驗表明,該制導方法能夠很好地滿足多項終端約束條件,并且具有很高的魯棒性。高斯偽譜法的微分矩陣滿秩,因此其計算結果相比勒讓德偽譜具有更高的精度[11]。
1 方法介紹
1.1 方法概述
本文采用高斯偽譜法對非線性狀態方程進行末端軌跡優化;在一個制導周期內,采用時鐘保持機制將最優控制指令代入實際飛行過程;在同一制導周期上,利用上一周期的全彈道信息及當前狀態量進行制導指令的在線重構;在下一制導周期上,重復上述步驟,并在最后一個制導周期應用比例導引方法擊中目標,如圖1所示。
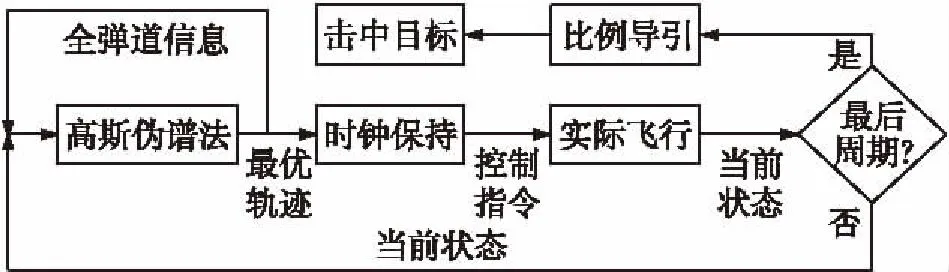
圖1 方法流程圖
1.2 高斯偽譜反饋與指令保持
高斯偽譜反饋是通過高斯偽譜法求解基本的最優控制問題,獲得離散的時變反饋控制指令。反饋的目的是消除由模型不確定性、外部干擾以及估計誤差造成的影響。指令的保持是根據上一步求得的以時間為自變量的控制指令,采用圖2的形式進行保持。
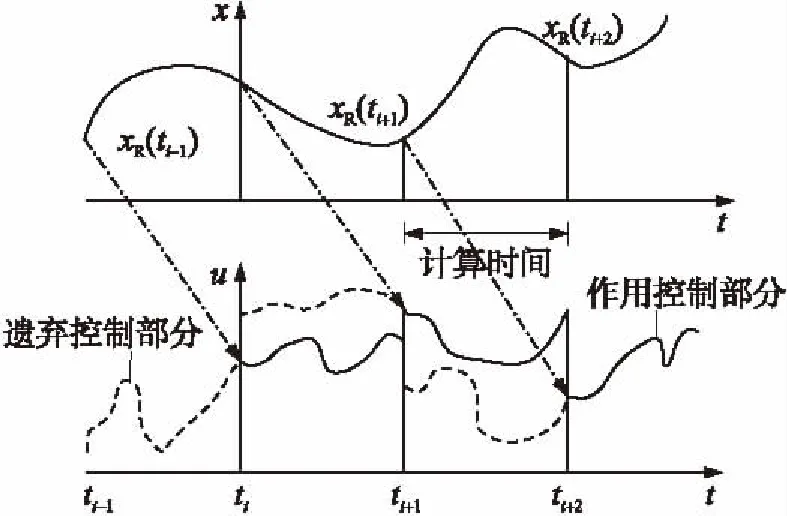
圖2 指令保持示意圖[7]
圖2中,xR(ti)為當前時刻的狀態量,u為控制量,ti和ti+1分別為當前時刻和下一個制導時刻。文獻[5]指出成功運用反饋控制的關鍵是能夠快速地得到一條開環控制,高斯偽譜法對光滑問題具有的指數收斂特性可以保證這種快速性。
1.3 初值估計策略
對于非線性規劃問題,為了加快尋優算法的速度,可以充分利用上一制導周期的最優結果:
(1)
式中:t0是初始時刻;tf是終端時刻,τi∈[-1,1]是高斯拉格朗日(LG)節點;ti,tj∈[t0,tf],是LG節點在時域內的分布;Li(t)為Lagrange插值多項式;X(ti)為上一制導周期優化的LG節點上的狀態量和控制量。
對于當前制導周期,去除上一制導周期所用時間tc,可以得到新的時間節點:
進而可以使用上一制導周期的優化結果來估計當前制導周期的初值:
通過后面的仿真結果可以看出,將X(tj)作為初值代入非線性規劃問題求解器進行計算具有較高的計算效率。
2 飛行器動力學模型
2.1 動力學方程
考慮大氣相對于地球相對靜止的無動力三自由度質點彈道運動學方程[12]:
式中:x,y,z為位置坐標;v為速度;m為飛行器質量;γ為彈道傾角;φ為航向角;α為攻角;ε為側傾角;g=μ/r2是重力加速度,r為地心距,μ為地球重力加速度常數;u1,u2為控制量;升力FL和阻力FD為
式中:q=ρv2/2為動壓,CL為升力系數,CD為阻力系數,Sref為飛行器參考面積;ρ為大氣密度,其表達式為
ρ=ρ0e-βH
(6)
式中:ρ0為海平面大氣密度,H為高度,β為密度常數。
2.2 約束條件
從結構和熱防護的角度出發,要求高超聲速飛行器在飛行過程中滿足動壓和過載約束:
式中:qmax和nz,max根據具體飛行器來選取。
考慮到高超聲速飛行器在末段飛行過程中的惡劣環境,除了要求攻角α和傾側角ε應該保持在一定的范圍之內,其變化率也必須保持在一定的范圍之內,即
2.3 優化性能指標
為使優化得到的攻角和傾側角足夠光滑,選取各控制量的平方和最小作為性能指標。同時,為了增加尋優算法的收斂區域,增強制導算法的魯棒性,把末端狀態量的約束加入到性能指標中,具體形式為
式中:K為加權系數。
對于某些特殊的擦邊界最優控制問題,由于原問題在擦邊界的過程中不再是光滑的最優控制問題,偽譜法不再具有指數收斂特性,即失去解算的快速性。這時通過改變性能指標可以將該問題轉化為光滑問題,進而獲得指數收斂特性,可以進行在線優化。
3 仿真結果及分析
3.1 飛行器模型
本文采用的飛行器模型為美國在“獵鷹”計劃支持下發展的新一代高超聲速遠程快速精確打擊武器系統——通用航空飛行器(CAV)。該飛行器具有乘波體構型,依靠氣動力在大氣層內滑行,具有升阻比大、飛行馬赫數高、飛行空間環境惡劣、對控制系統要求較高等特點。NASA公布的CAV的總體參數如表1所示。

表1 飛行器總體參數
CAV在低層稠密大氣的氣動系數公式為
其中各氣動參數可參考文獻[13]。
3.2 任務要求
飛行器的任務要求是在初始拉偏和過程拉偏的情況下滿足以下終端約束條件:
攻角、側傾角以及控制量的變化范圍為

任務要求的主要難點在于速度控制,飛行器的速度對升力、阻力非常敏感,也是長周期的控制過程,調節能力非常有限,因此要求制導律在末段飛行段進行精確的控制。
3.3 不同初始條件下的制導結果
考慮飛行器不同初始條件下的無干擾彈道,可以驗證高斯偽譜反饋制導方法對不同初始條件的適應性。表2列出了5種初始條件,初速均為1 718 m/s。表3為終端狀態約束。
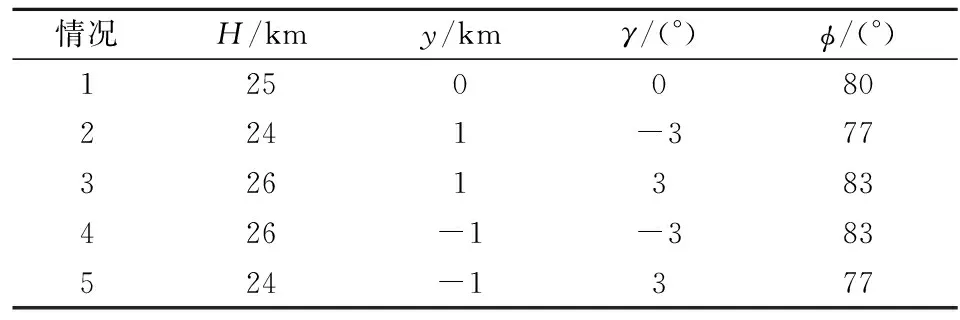
表2 初始條件

表3 終端狀態約束
圖3為空間彈道曲線,可以看出不同初始條件下的彈道均能滿足終端狀態約束,并且以相似形式擊中目標。
圖4和圖5分別為不同初始條件下的速度曲線和彈道傾角曲線。由于終端狀態相同,不同初始條件的彈道在末段飛行后期差異不大,因此對于彈道的調整主要集中在末段飛行的前期。雖然末段飛行前期的速度和彈道傾角差異較大,但都能滿足終端馬赫數為3和終端彈道傾角為-80°的約束條件。
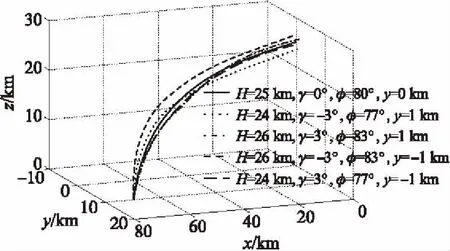
圖3 空間彈道
圖4 速度曲線
圖5 彈道傾角曲線
圖6為不同初始條件下的攻角變化曲線。攻角在末段飛行后期差異不大,在末段飛行前期差異很大,彈道的調節也主要是集中在末段飛行的前期。不同初始條件下的終端攻角都能達到0°的約束條件。
圖7為每一制導周期內高斯偽譜法單次優化的計算時間。5種初始條件情況均在主頻3.3 GHz計算機上使用Matlab 7.0進行仿真,計算時間tcal均集中在0.1 s左右。由于不存在過程干擾,優化時間主要用于克服LG節點之間的龍格現象。結果表明,選取0.8 s的制導周期可以滿足指令解算的需要,同時相比50 s以上的末段飛行時間也可以保證合理的制導精度。
圖6 攻角曲線
圖7 計算時間
表4為不同初始條件下的終端狀態偏差。5種初始條件下的脫靶量M和速度偏差都能保證在百分之一的數量級,終端彈道傾角和攻角偏差能保證在萬分之一的數量級。

表4 終端狀態偏差
3.4 擾動模型
建立風速、大氣密度和溫度隨高度變化的拉偏模型:
式中:v(H),ρ(H),T(H)分別為風速、大氣密度和溫度干擾隨高度變化的函數,v(H)最大能達到50 m/s,ρ(H)最大能達到0.09ρst,T(H)最大能達到30 K。Δv,Δρ,ΔT為[-200%,200%]的拉偏系數。
飛行器的氣動拉偏模型是在標準氣動升阻力系數的基礎上加上偏差值:
考慮擾動模型后,飛行器速度控制的難度增加,需要在末段飛行段之前的巡航段對飛行器進行關機控制。假設飛行器在巡航段勻速飛行,可以利用高斯偽譜法尋找最優關機時刻,并作為初值代入末段飛行段中。
3.5 過程擾動下的蒙特卡洛打靶結果
為了測試高斯偽譜反饋制導方法的魯棒性,在帶關機控制的情況下進行1 000次蒙特卡羅打靶實驗,其中考慮初始狀態拉偏項和3.4中所述拉偏項,如表5所示,表中,μ為均值,3σ為均方差。由于速度對升力、阻力較為敏感,且速度控制能力有限,因此升力、阻力拉偏相對較小。

表5 蒙特卡洛打靶拉偏分布
圖8和圖9為終端位置在x和y方向上的誤差PΔx,PΔy概率分布,各個方向的誤差都在0.1 m以內。圖10和圖11為終端速度和終端彈道傾角的誤差概率PΔv,PΔγ分布,終端速度和終端彈道傾角大部分分布在約束范圍之內。圖12為終端攻角的誤差概率PΔα分布,終端攻角主要集中在-0.7°附近,滿足約束條件。
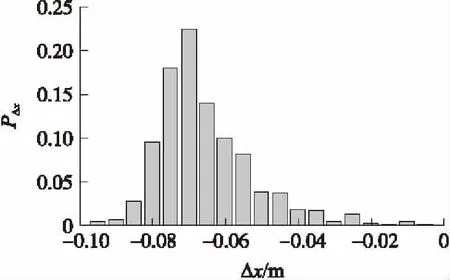
圖8 終端位置x方向誤差概率分布

圖9 終端位置y方向誤差概率分布
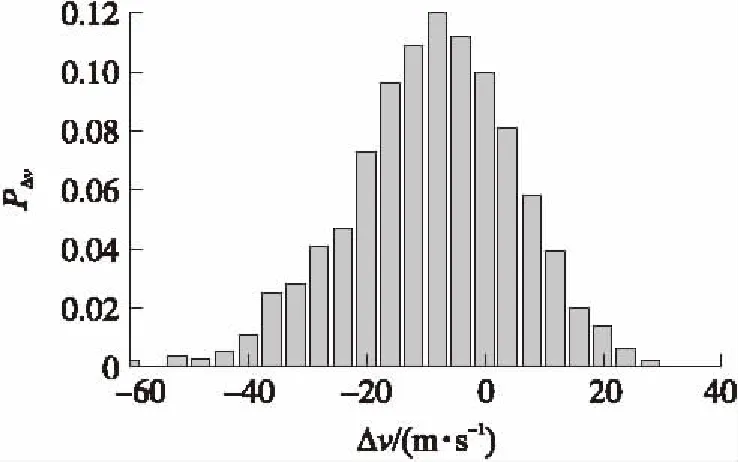
圖10 終端速度誤差概率分布
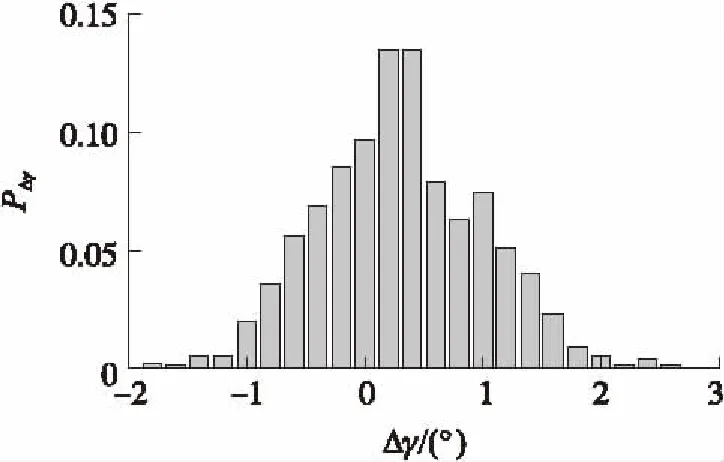
圖11 終端彈道傾角誤差概率分布
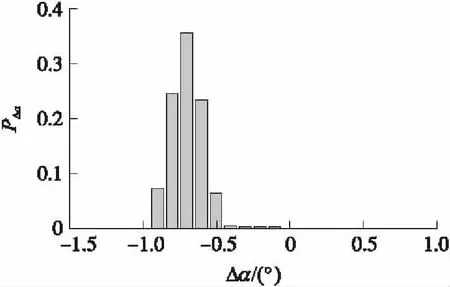
圖12 終端攻角誤差概率分布
對終端狀態偏差進行統計,脫靶量的期望為0.092 m,落入概率為100%;速度誤差的期望為-6.913 m/s,落入概率為81.2%;彈道傾角偏差的期望為0.040 40°,落入概率為93.3%;攻角偏差的期望為-0.611°,落入概率為99.7%。因此,飛行器終端脫靶量、速度偏差、彈道傾角偏差以及攻角偏差的期望都很小,滿足約束條件。值得注意的是,攻角、彈道傾角和速度需要進行全程能量管理才能保證,這反映出在線高斯偽譜制導的效果。落入概率為終端狀態偏差落入約束范圍內的概率。終端速度偏差的落入概率最低,說明終端速度最難控制。蒙特卡羅打靶結果表明,高斯偽譜反饋制導方法在惡劣的飛行環境下具有很好的制導能力和魯棒性。
4 結束語
本文針對高超聲速飛行器,基于高斯偽譜法,建立了一種在末段飛行段滿足多種約束條件的在線反饋制導方法。使用上一制導周期優化結果作為初值猜測的策略,在解算過程中可以有效地加速算法收斂。在最后一個制導周期加入比例導引方法可以保證終端命中點具有較高的精度。不同初始條件下的制導結果說明,該方法具有很好的適用性。各種拉偏情況下的蒙特卡洛打靶實驗表明,該方法在惡劣的飛行環境下具有較好的穩定性和魯棒性,能有效地對終端速度進行控制。
[1] KIM M,GRIDER K V.Terminal guidance for impact attitude angel constrained flight trajecories[J].IEEE Transactions on Aerospace and Electronic Systems,1973,10(6):852-859.
[2] LEE Yong-in,RYOO C K,KIM E.Optimal guidance with constraints on impact angle and terminal acceleration[R].AIAA 2003-5795,2003.
[3] LU P,DOMAN D B,SCHIERMAN J D.Adaptive terminal guidance for hypervelocity impact in specified direction[J].Journal of Guidance,Control,and Dynamics,2006,29(2):269-278.
[4] 趙漢元.飛行器再入動力學與制導[M].長沙:國防科技大學出版社,1997.
ZHAO Han-yuan.Entry dynamics and guidance[M].Changsha:National University of Defence Technology Press,1997.(in Chinese)
[5] DAVID A B,GEOFFREY T H.Direct trajectory optimization and costate estimation via an orthogonal collocation method[J].Journal of Guidance,Control,and Dynamics,2006,29(6):1 435-1 440.
[6] FAHROO F,ROSS I M.Costate estimation by a Legendre pseudospectral method[R].AIAA-98-4 222,1998.
[7] ROSS I M,SEKHAVAT P.Optimal feedback control:foundations,examples,and experimental results for a new approach[J].Journal of Guidance,Control,and Dynamics,2008,31(2):307-321.
[8] BOLLONO K P,ROSS I M.A pseudospectral feedback method for real-time optimal guidance of reentry vehicles[C]//Proceedings of the 2007 American Control Conference.New York City,USA:The American Antomatic Control Council,2007:11-13.
[9] 崔鋒.采用偽譜法的再入飛行器最優反饋制導方法[J].中國制造業信息化,2011,40(19):42-45.
CUI Feng.The optimal feedback guidance control method of entry vehicles based on pseudospectral method[J].Manufacture Information Engineering of China,2011,40(19):42-45.(in Chinese)
[10] PAUL Z.Tactical and strategic missile guidance[M].Cambridge,Massachusetts:Charles Stark Draper Laboratory,Inc.,1997.
[11] GARG D,PATTERSON M A,HAGER W W,et al.A unified framework for the numerical solution of optimal control problems using pseudospectral methods[J].Automatica,2010,46(11):1 843-1 851.
[12] VINH N X.Flight mechanics of high-performance aircraft[M].Cambridge,England,U.K:Cambridge Univ Press,1993.
[13] TERRY H P.A common aero vehicle model,description,and employment guidance[R].Arlington:Schafer Corporation for AFRL and AFSPC,2003.
