基于Simulink的混合試驗系統及其驗證
2014-09-05 09:57:58陳永盛許國山
振動與沖擊 2014年7期
陳永盛, 吳 斌, 王 貞, 許國山, 曾 聰
(哈爾濱工業大學 土木工程學院,哈爾濱 150090)
混合模擬又稱擬動力試驗或者聯機混合試驗。它以結構計算模型為中心,以積分算法和加載控制為基本點,以混合試驗系統為工具,其目標是充分發揮數值模擬與試驗加載的優勢,更加真實地揭示結構的動力反應。
混合模擬20世紀70年代開始萌芽,在20世紀80-90年代得到快速發展。21世紀以來,隨著大型復雜結構的出現,混合模擬進入繁榮階段:在空間域上,為了整合不同地區的實驗資源,混合模擬由本地單機試驗向網絡協同試驗發展;在時間域上,為了測試速度相關型試件,混合模擬由快速試驗向實時試驗方向發展。這對混合試驗系統提出了新的要求,相繼出現了① 基于有限元法的試驗架構,如NetSlab[1], OpenFresco[2]及UI-Simcor[3]模式;② 基于并行計算的試驗架構,如P2P[4]和PLSRT2[5]等模式。這些包含結構計算模型、積分算法、加載控制,時滯補償等模塊的復雜試驗系統在開展混合模擬時固然實用,但對初學者不便理解混合模擬的原理,從而很難掌握混合模擬的執行過程;對研究者需要掌握所有模塊的工作性能,從而不便集中精力專項研究開發。為了促進混合模擬的研究與應用,迫切需要一個基本的混合試驗系統。
本文根據混合模擬的基本原理,提出了一個基于Simulink仿真環境的混合試驗系統。首先介紹了Matlab仿真工具箱Simulink及其實時工作間(Real-Time Workshop, RTW),接著在闡述了混合模擬基本原理和混合試驗系統架構的基礎上提出了采用Simulink的混合試驗系統。然后利用簡化的加載系統模型進行了混合試驗系統仿真,最后采用真實的加載系統進行混合試驗系統驗證。仿真結果表明所提混合試驗系統各模塊可協同工作;試驗結果表明該混合試驗系統便于進行硬件在回路仿真。
1 Simulink仿真環境
1.1 Simulink簡介
Simulink是MathWorks公司開發的MATLAB里的一個仿真工具箱,其主要功能是實現動態系統的建模、仿真和分析。在系統的開發設計中,可以預先對目標系統進行仿真試驗,按照性能指標的要求對系統做適當的修改,按照仿真的最佳效果來調整系統的參數,從而減少物理系統設計的時間,提高系統開發的效率[6]。
Simulink是面向框圖的仿真軟件,它具有以下特點:① 通過拖放框圖的方式建立系統模型,取代傳統編寫程序,因此結構和流程清晰;② 交互式設置和運行仿真,自動在給定精度下以最快速度運行仿真,仿真結果貼近實際;③ 適應面廣,包括線性、非線性系統,連續、離散及混合系統,單任務或多任務系統。本文的混合試驗系統及其仿真就是在Simulink環境下實現的,這是一種純軟件的仿真,其優點是操作簡便,價格低廉,缺點是該仿真沒有實時支撐,也無加載系統參與。
1.2 Real-Time Workshop
Simulink參數設置選項中的Real-Time Workshop(RTW)為實時仿真提供了可能。它可以從Simulink模型生成優化的,可移植的和可定制的ANSI C代碼,可以針對某種目標環境創建整個系統或子系統可下載執行的 C 代碼,以開展硬件在回路仿真,即混合模擬[7]。
本文的混合試驗系統驗證采用了這種基于RTW的硬件在回路半實物仿真。具體實現是依托dSPACE(基于MATALB/Simulink 控制系統的軟硬件工作平臺)。dSPACE 軟件體系中一個重要的部分是實時接口軟件RTI(Real- Time Interface),它是連接dSPACE 實時系統與MATALB/ Simulink 的紐帶,集成了dSPACE 系統I/O 硬件實時模型,可以對實時代碼生成軟件RTW(Real Time Workshop)進行擴展,實現從Simulink 模型到dSPACE 實時硬件代碼的自動下載。
2 混合模擬原理與混合試驗系統
2.1 混合模擬的原理與步驟
混合模擬是結構數值計算與試驗加載相結合的一種聯機試驗方法,其基本原理見圖1。混合模擬的步驟(見圖2)是:① 將研究對象在空間上離散,建立結構的計算模型和運動方程。確定做全結構試驗或子結構試驗(此處以子結構試驗為例)。② 將運動方程在時間上離散,建立第k時刻的離散時間運動方程(見式(1))。并選定積分步長和逐步積分方法(以中心差分法為例)。③ 依據地震動記錄中第k時刻的加速度值和結構總反力Rk=RN(Xk)+RE(Xk),根據第k時刻運動方程和積分方法計算第k+1步的位移Xk+1。④ 將計算出的位移Xk+1施加到各子結構相應的自由度上,對數值子結構,依據假定的恢復力模型計算反力RN(Xk+1);對試驗子結構,待實現目標位移后量測反力RE(Xk+1)。重復③-④步,遍歷所有的時間。

圖1 混合模擬原理示意圖
(1)

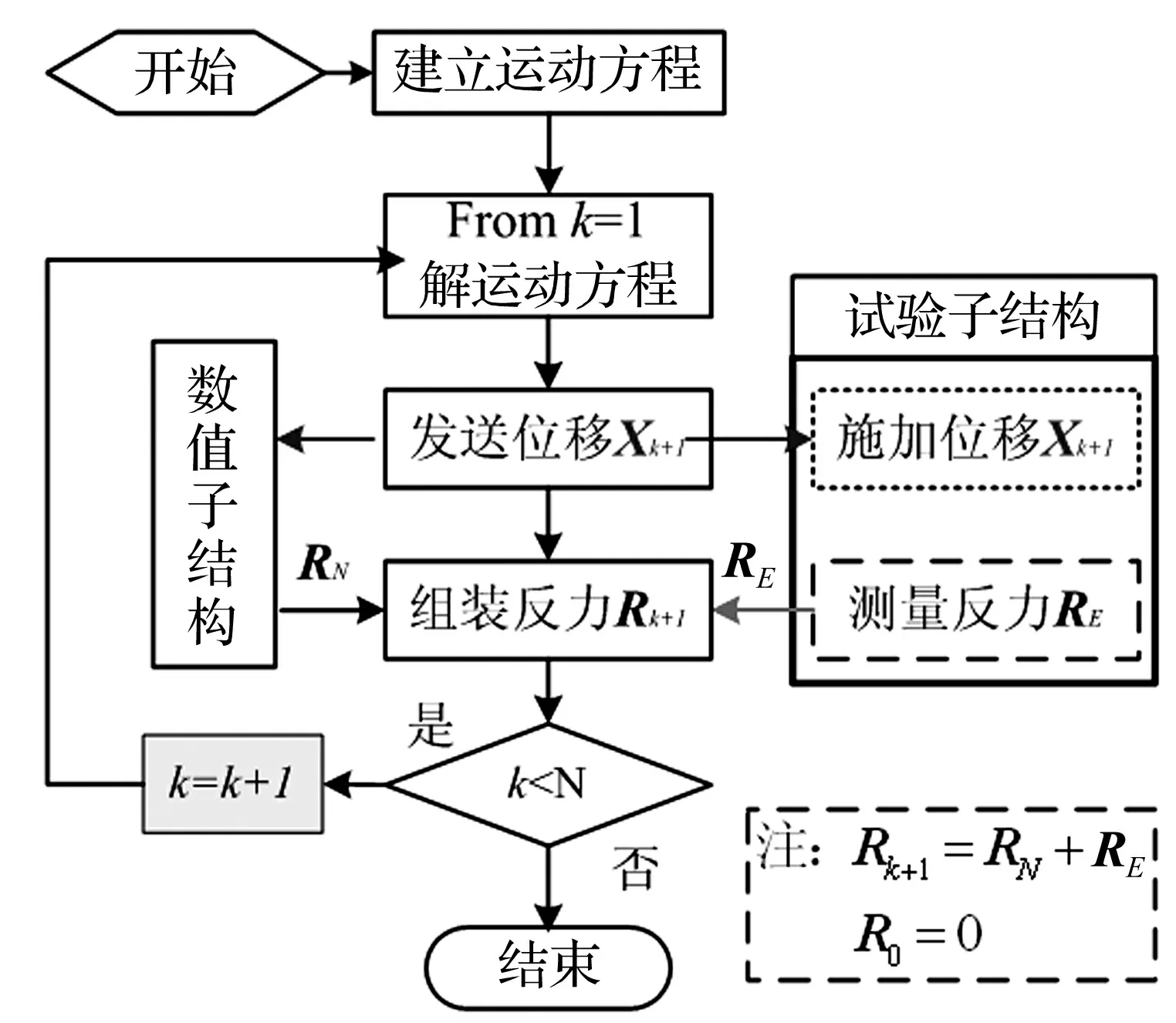
圖2 基于中心差分法的混合模擬步驟流程圖
2.2 混合試驗系統基本架構
由以上混合模擬的原理知,混合試驗系統架構中必須包含三大模塊:運動方程建立與求解模塊、數值子結構模塊和試驗子結構模塊。
運動方程的建立與求解模塊主要是根據結構計算模型,確定質量矩陣M、阻尼矩陣C、地震動作用位置矩陣B和典型的地震動加速度記錄,建立結構的整體運動方程。選擇合適的積分步長和逐步積分算法,求解結構的運動方程。
數值子結構模塊是假定的數值子結構的恢復力模型,其作用是給定單元結點自由度反力與位移的關系。它等同于通用有限元軟件中的單元及材料庫。
試驗子結構模塊包括目標位移的獲取,位移命令的發送、試驗加載系統和數據采集系統。它是混合試驗系統的關鍵環節,也是最復雜的模塊。
根據混合模擬的原理和試驗系統架構,建立了基于Simulink的混合試驗系統(見圖3)。其中運動方程的建立通過在Matlab中用M文件初始化相關參數來實現(圖3中略去)。運動方程的求解見EQ Solver模塊;數值子結構見Numerical Substrucure模塊;試驗子結構模塊中的目標位移的獲取見Get TargDsp模塊,位移命令的發送見Send CommDsp模塊,試驗加載系統見Loading System模塊, 數據采集系統見Data Acquire模塊。
2.3 試驗系統關鍵環節
關于混合模擬中的時間步長,有積分步長、控制步長、模擬步長和計算步長(見表1)。
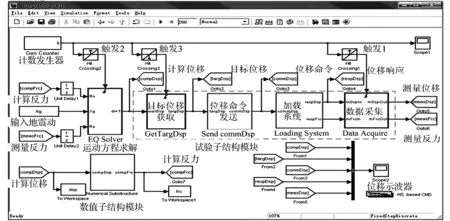
圖3 基于Simulink的混合試驗系統

表1 混合試驗系統中的各類時間步長
積分步長(dtInt)是在時間上離散運動方程時所用的時間間隔,它通常關系到積分算法的穩定性,但它與實際計算所需要的時間無關。控制步長(dtCon)是試驗加載系統控制器的采樣步長,目前的電液伺服加載系統采樣頻率高于1 kHz,因此控制步長它通常很小如2-10≈0.001 s。模擬步長(dtSim)是在試驗加載系統上為實現目標位移所必須的加載時間。模擬步長通常是積分步長的整數倍,即:dtSim=StdtInt,其中St為時間比例因子。計算步長(dtCom)是為了滿足計算時間需求而設置的一個最大時間。通常在計算中由于結構出現屈服、屈曲、開裂或倒塌等而使每一計算步所用的時間是不確定的,為了操作的方便人為設定一個足夠的時間并認為在該時間步長末可以提取目標位移。
關于混合模擬的執行過程,圖2給出了混合模擬步驟流程圖,圖4給出了混合試驗系統設計目標。

圖4 混合試驗系統設計目標
在基于Simulink的混合試驗系統(見圖3)的設計中,用計數發生器Gen Counter以模擬時間dtSim為周期產生0~N=dtSim/dtCon的整數。三個觸發模塊:數據采集模塊(Data Acquire)、方程求解模塊(EQ Solver)和目標位移獲取模塊(Get targDsp)分別通過Hit Crossingx(x=1,2,3)與計數器相連,通過設置Hit Crossing閥值,確定三個觸發模塊的執行順序與時間。
建議Hit Crossing1取0.8N,Hit Crossing2取0.9N,Hit Crossing3取N,這樣在開展混合模擬時,先提取測量反力,再解方程求位移,然后在模擬時間步長的整數倍時間點獲取目標位移。為避免作動器階躍太大,一個簡便的辦法是對目標位移進行插值發送,插值步數n=0.5*dtSim/dtSub,其中dtSub為加載子步,dtSub應該大于作動器靜態時滯。在圖3基于Simulink的混合試驗系統中,加載系統(Loading System)用增益Ke代替,數值子結構用增益Kn代替,模擬結果(見圖5)能實現混合試驗系統的預期設計目標。
3 混合試驗系統仿真
選圖6所示單自由度體系為研究對象,其中結點質量M=504.9 kg,立柱側向剛度Kn=34 625 N/m, 彈簧試件剛度Ke=34 625 N/m, 阻尼比ξ=0.02,以鋼柱為數值子結構。輸入El Centro (NS,1940)地震記錄(峰值220 gal,取持時6秒),采用中心差分法(dtInt=0.01 s),進行動力時程分析。本節以簡化的二階傳遞函數為加載系統模型,進行混合試驗系統仿真。
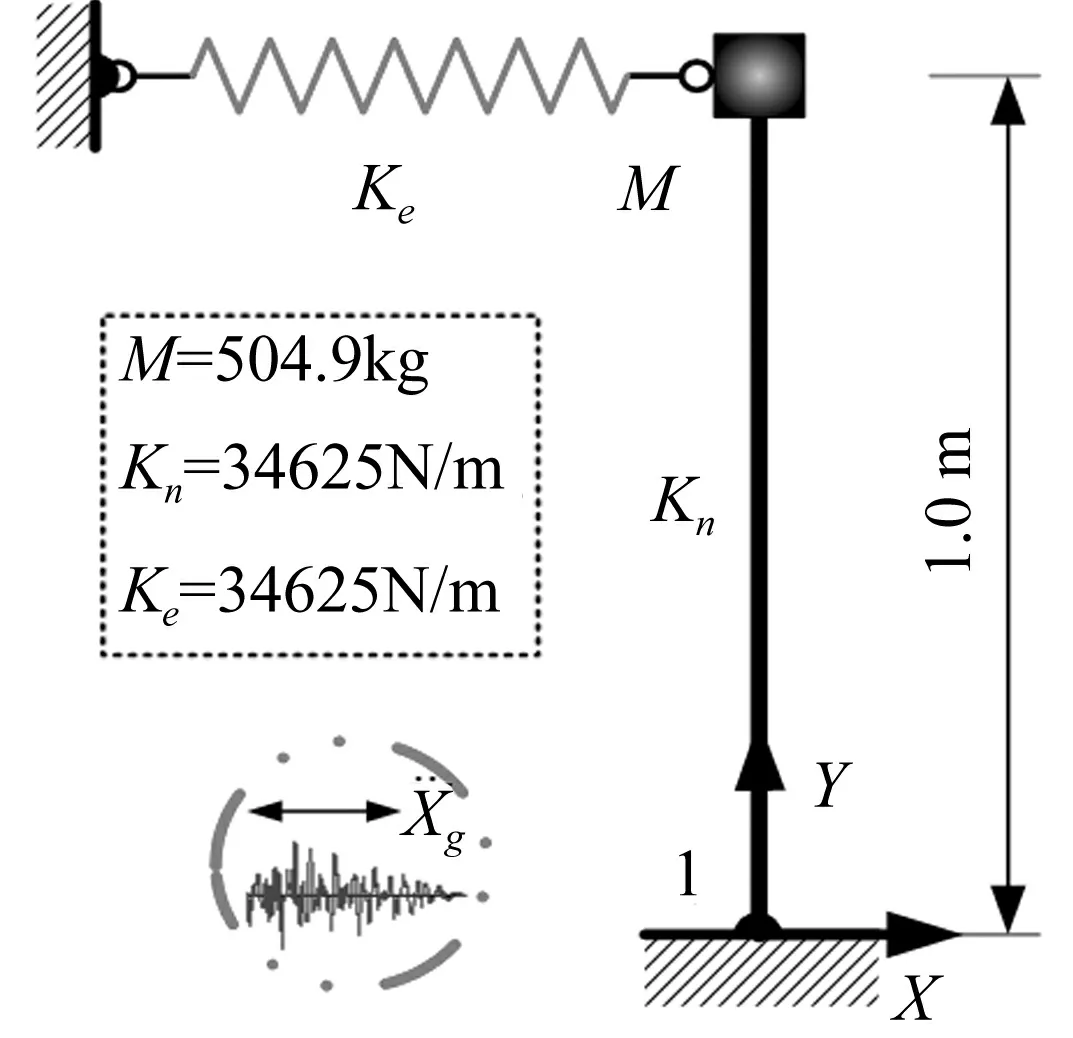
圖6 結構計算簡圖
3.1 加載系統傳遞函數模型
為了進行混合試驗系統仿真,需要建立加載系統(包括控制器、作動器和試件)的模型。這里選用文獻[8]提出二階傳遞函數作為加載系統的模型。該二階傳遞函數為:
(2)
其中ξA,ωA分別為此加載系統的阻尼比與圓頻率,τ為純時滯,s為拉普拉斯算子。取ξA=1.5,ωA=210 rad/s,τ=0.000 5 s。并把連續的傳遞函數轉換為離散的傳遞函數。

圖7 方波命令下模型的位移反應
該模型在階躍命令下的位移反應見如圖7所示,文獻[9]用高價加載系統模型驗證了上述簡化的二階線性模型精度較高,可以代替真實的加載系統進行數值仿真。
3.2 混合試驗系統仿真結果
將圖3中基于Simulink的混合試驗系統架構中的加載系統模塊(Loading System)用上述的簡化的二階傳遞函數及增益(彈簧剛度Ke)構成的模塊代替,以圖6所示單自由度結構為對象進行混合試驗系統仿真。 圖8為該結構頂部水平位移反應時程,整體圖說明混合試驗系統各模塊協同工作性能很好,沒有引起模擬結果發散。局部圖可以看出混合模擬的執行過程,達到了2.3節設定的目標。
如果要研究命令發送的模式,對目標位移進行外插-內插以實現連續加載模式,或者在“斜坡-保持”加載模式中改變斜坡段時間及加載子步等,可以修改圖3中位移命令發送模塊。如果要研究實時試驗,可以調整時間比例因子和Hit Crossingx中的閥值進行模擬。如果要研究加載系統,如位移控制模式或力控制模式等可以采用相應的加載系統模型進行混合模擬仿真。

圖8 結構頂部水平位移反應時程(仿真dtSim=1.000 s,dtSub=0.100 s)
4 混合試驗系統驗證
本節以真實的試驗加載系統代替圖3中基于Simulink的混合試驗系統架構中的加載系統模塊,以圖6所示結構為對象開展真實的混合模擬,驗證所提混合試驗系統的性能。
4.1 試驗加載系統及其特性
在真實的混合模擬中,混合試驗系統中其他模塊與試驗加載系統的連接,可以通過模擬輸入輸出實現。對圖3基于Simulink的混合試驗系統架構,在位移命令的發送(Send CommDsp)模塊后連接一個模擬輸出(D/A),通過數據線連接到真實試驗加載系統的模擬輸入端(A/D);在數據采集系統(Data Acquire)模塊前分別連接兩個模擬輸入(A/D),用于量測從真實試驗加載系統模擬輸出端(D/A)傳出的位移及反力的電壓信號。利用該方法可以在工控機里的Simlink中進行混合試驗系統建模,并連接真實的加載系統進行試驗(如MTS)開展混合模擬[10]。其缺陷是加載系統與其他模塊的采用模擬信號連接,引入了噪聲。
本文采用哈爾濱工業大學土木工程學院小型混合試驗平臺(mini-HS@HTT)中的dSPACE-FTS試驗加載系統[11](實物見圖9,性能見圖10)。該系統的數字控制器在Simlink中搭建并在dSPACE實時仿真平臺上運行,因此它可以用數字信號連接混合試驗系統架構中的位移命令發送模塊及數據采集系統模塊。從而減少了噪聲的引入。
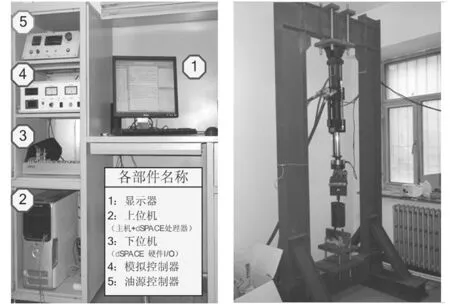
圖9 基于dSPACE-FTS的試驗加載系統

圖10 階躍位移命令與位移響應
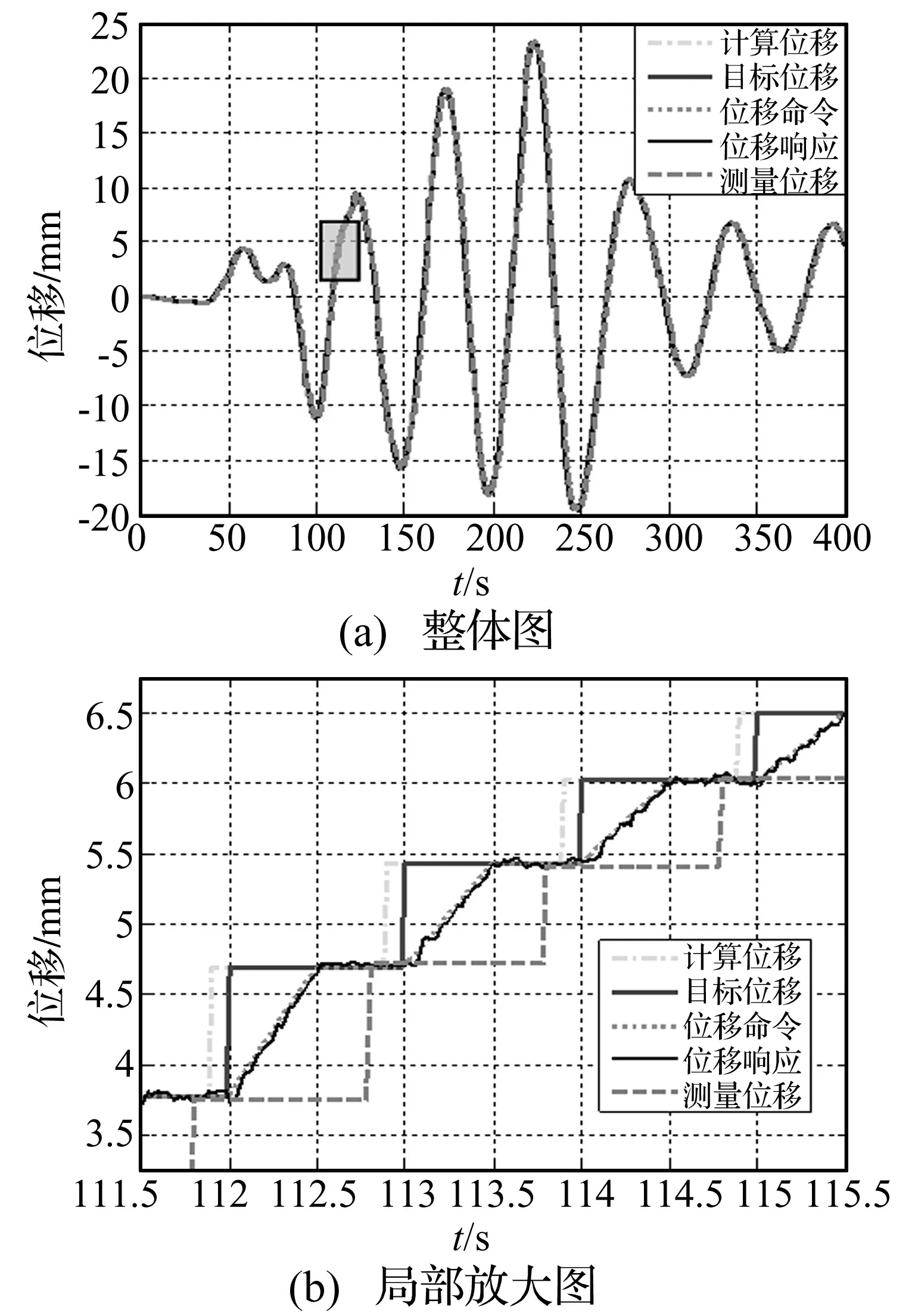
圖11 結構頂部水平位移反應時程(dtSim=1.000 s,dtSub=0.001 s)
4.2 混合試驗系統試驗驗證
將圖3中的加載系統模塊(Loading System)用dSPACE-FTS試驗加載系統的控制與數據采集端Simulink模型代替就能實現硬件在回路。以圖6所示單自由度結構為對象開展混合模擬,驗證混合試驗系統。(注,試驗前彈簧先預拉一定位移,并以此為平衡位置,試驗時彈簧一直處于受拉狀態。)
圖11為該結構頂部水平位移反應時程,整體圖說明混合試驗系統各模塊同連接的硬件設備(試驗加載系統)協同工作性能良好。局部圖可以看出混合模擬的執行過程,這里采用加載子步dtSub=dtCon,實現了作動的平穩運動。
本混合模擬中,試驗子結構(彈簧)是線彈性,其剛度Ke可以提前測定,因此可認為數值模擬的結果為真解。為了研究混合試驗系統的誤差,圖12列出了圖3所示結構的數值模擬和混合模擬的結果,可見混合模擬與數值模擬吻合較好。圖13給出了混合模擬的絕對誤差與相對誤差(相對誤差是絕對誤差除以數值模擬反應的最大值并取絕對值而得),誤差主要來源于①力傳感器的噪聲,②試驗時作動器實際位移±12 mm (發給加載系統的命令折減一半)相對其量程±100 mm太小。從該圖可以看出誤差的累積效應。
以上,我們從《偽古文尚書》北傳問題出發,對青齊學術在北魏洛陽時代的興盛,以及在東魏北齊時代的退潮,作了粗略的梳理。由此可得兩點結論:其一,青齊學術在北朝的沉浮與政治權力的興替密切相關;其二,青齊學術的流行縮小了南北學術差異,為日后南北學術的融合創造了條件。
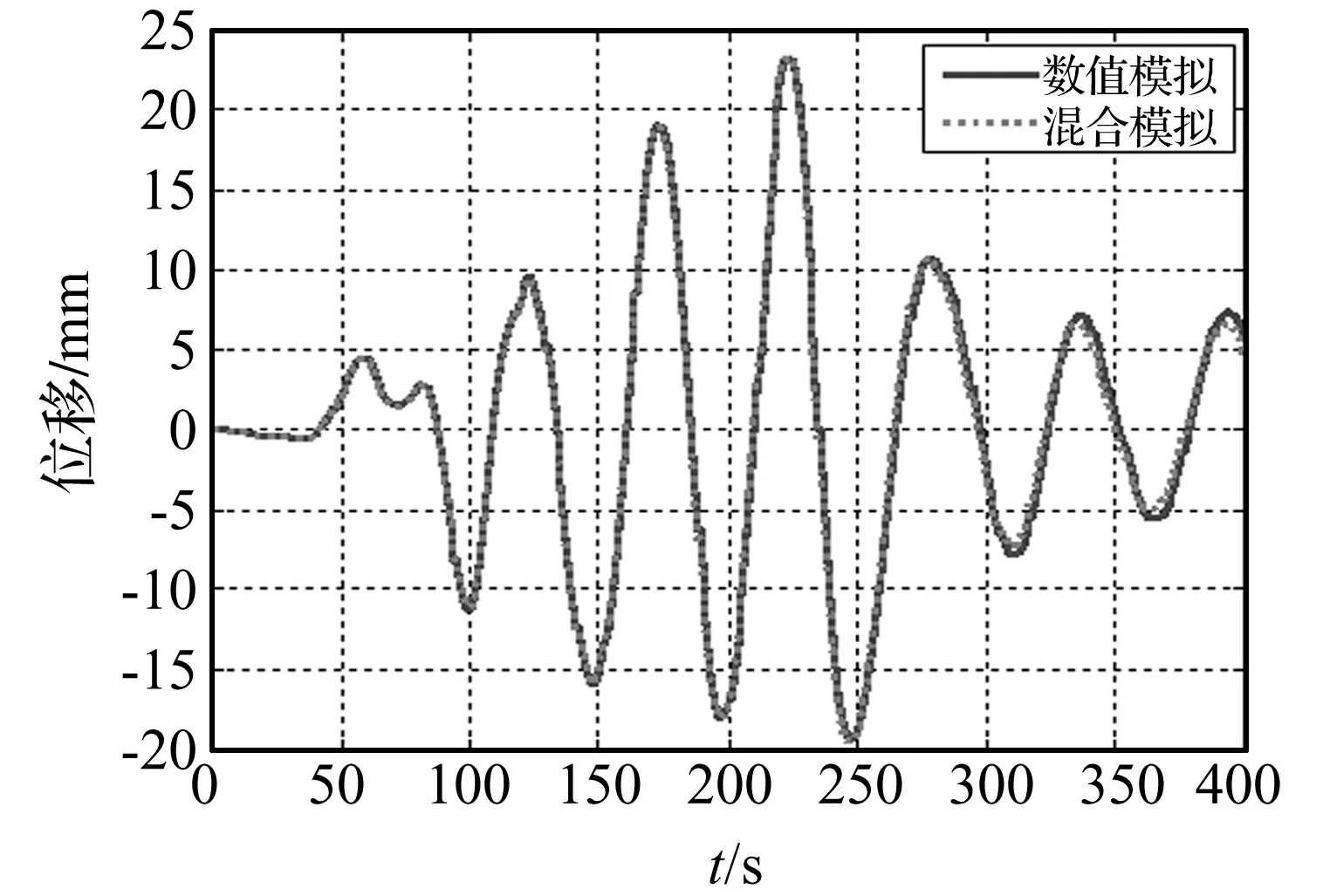
圖12 數值模擬與混合模擬位移時程比較
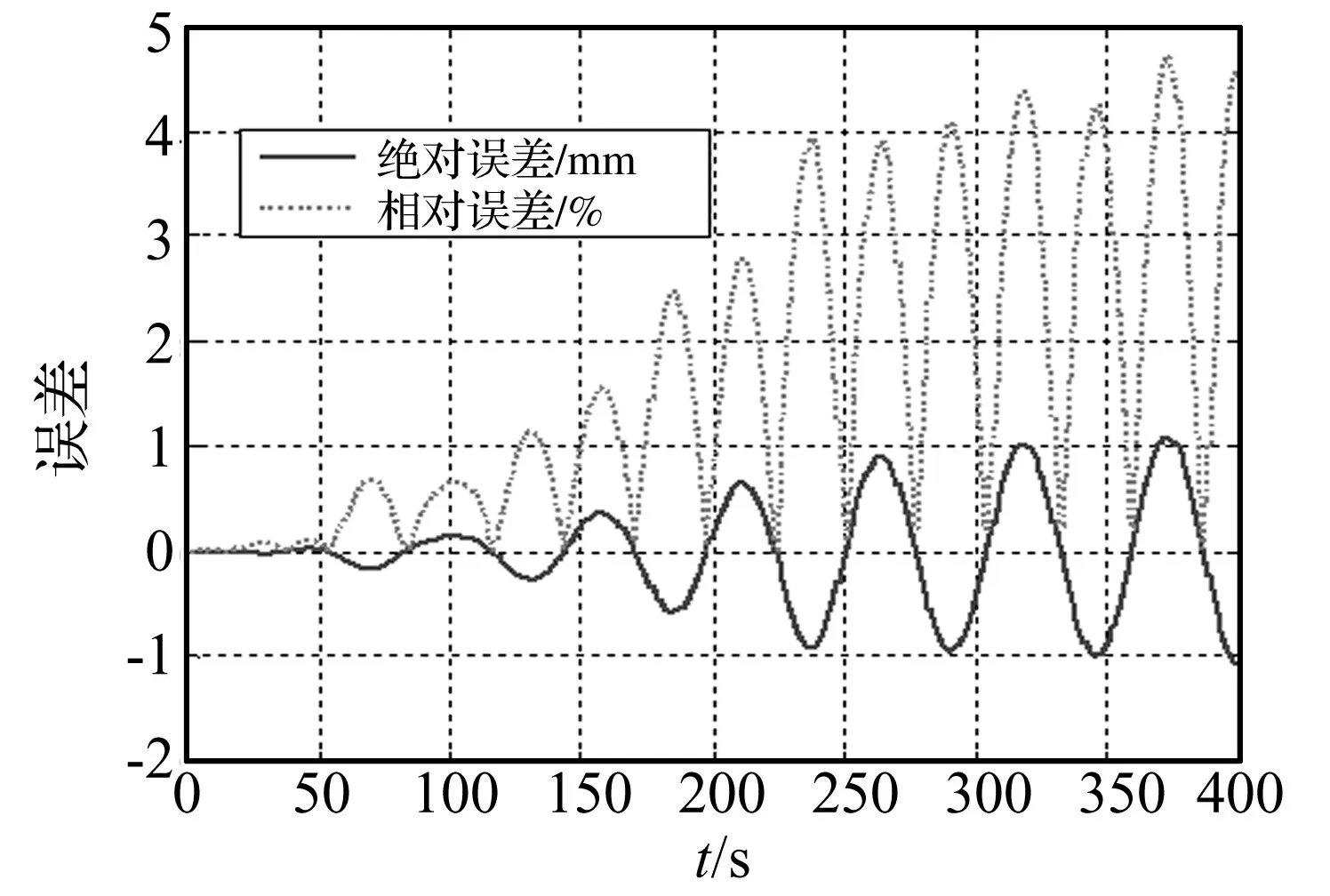
圖13 混合模擬的絕對誤差與相對誤差
5 結 論
根據混合模擬的基本原理,本文提出了一個基于Simulink仿真環境的混合試驗系統,討論了其中的關鍵環節,并進行了混合試驗系統的仿真與驗證,結論如下:
(1) 混合試驗系統基本架構中包含三個模塊:運動方程求解模塊、數值子結構模塊和試驗子結構模塊。試驗子結構模塊包括目標位移獲取模塊、位移命令發送模塊、加載系統模塊和數據采集模塊。在Simulink仿真環境下,可以方便地搭建混合試驗系統的基本架構,建立基于Simulink的混合試驗系統。并方便地處理混合模擬中各類時間步長。
(2) 通過混合模擬的仿真,驗證了基于Simulink的混合試驗系統各模塊的協同工作性能。根據專注的問題或設定的目標,可以修改其中相應的模塊,通過仿真來解決問題并實現目標。在開展真實的混合模擬之前,也應進行仿真以便為真實的混合模擬做好準備。
(3) 通過真實的混合模擬,驗證了基于Simulink的混合試驗系統能進行硬件在回路仿真。混合試驗系統中其他模塊可以方便地與試驗加載系統連接起來,彈性試件混合模擬結果表明該混合試驗系統誤差在可接受范圍之內。
參 考 文 獻
[1]Xiao Y, Hu Q, Guo Y R, Zhu P S and Yi W J. Network platform for remote structural testing and shared use of laboratories[J]. Progress in Natural Science,2005,15(12): 1135-1142.
[3]Kwon O S, Elnashai A S, Spencer BF. A framework for distributed analytical and hybrid simulations[J]. Structural Engineering and Mechanics,2008, 30:331-350.
[4]Pan P, Tomofuji H, Wang T, et al. Development of peer-to-peer (P2P) Internet online hybrid test system[J]. Earthquake Engineering and Structural Dynamics,2006, 35:867-890.
[5]王貞. 實時混合試驗的控制和時間積分算法[D]. 哈爾濱:哈爾濱工業大學,2012:8-18.
[6]鄭阿奇,曹戈,趙陽. MATLAB實用教程[M].北京:電子工業出版社,2005.
[7]任傳俊,蔣志文. Real-Time Workshop實時仿真與應用[J]. 計算機仿真,2007,24(8): 268-271.
REN Chun-jun, JIANG Zhi-wen. Research and application of real-time simulation on Real-Time Workshop[J]. Computer Simulation, 2007,24(8):268-271.
[8]Wu B, Wang Q Y, Shing P B, et al. Equivalent force control method for generalized real-time substructure testing with implicit integration[J]. Earthquake Engineering and Structural Dynamics,2007, 36:1127-1149.
[9]許國山. 實時子結構試驗的等效力控制方法[D].哈爾濱:哈爾濱工業大學,2010:55-56.
[10]陳永盛,吳斌,許國山,等. 基于OpenFresco-MTS的混合試驗系統[C].第三屆土木工程結構試驗與檢測技術暨結構實驗教學研討會, 哈爾濱,2012.5.
[11]周惠蒙, 王濤, 陳永盛,等. 采用dSPACE控制的電液伺服試驗加載系統[J]. 結構工程師, 2011(27): 1-5.
ZHOU Hui-meng, WANG Tao, CHEN Yong-sheng, et al. Electro-hydraulic servo experimental loading system with dSPACE control[J]. Structural Engineers,2011(27):1-5.
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
哲學評論(2021年2期)2021-08-22 01:53:34
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
中華詩詞(2019年7期)2019-11-25 01:43:04
家庭影院技術(2017年9期)2017-09-26 03:41:45
影視與戲劇評論(2016年0期)2016-11-23 05:26:01
