基于模糊調(diào)節(jié)的兩輪自平衡車的終端滑模分解控制
2014-09-28 04:58:00楊興明高銀平
合肥工業(yè)大學(xué)學(xué)報(自然科學(xué)版) 2014年10期
楊興明, 段 舉, 朱 建, 高銀平
(合肥工業(yè)大學(xué) 計算機與信息學(xué)院,安徽 合肥 230009)
欠驅(qū)動系統(tǒng)是一類驅(qū)動器數(shù)目小于系統(tǒng)自由度數(shù)目的系統(tǒng)。兩輪自平衡小車則是欠驅(qū)動系統(tǒng)的典型代表,它具有欠驅(qū)動、非線性、強耦合、多變量的特點。它可以在3個自由度上運動,包括擺桿的旋轉(zhuǎn),車體的前后運動以及車體的旋轉(zhuǎn)。其廣泛的應(yīng)用前景引起了國內(nèi)外學(xué)者的關(guān)注。由于非線性系統(tǒng)不能建立精確模型,傳統(tǒng)PID、LQR等線性控制方法具有局限性,因而研究人員開始關(guān)注智能控制方法的應(yīng)用,滑模控制、模糊控制、神經(jīng)網(wǎng)絡(luò)、迭代學(xué)習(xí)、遺傳算法等控制方法的設(shè)計各有特點。其中,滑模控制的特點在于系統(tǒng)的“結(jié)構(gòu)”并不固定,隨著當(dāng)前系統(tǒng)的狀態(tài)不斷變化,按照預(yù)定的“滑動模態(tài)”的狀態(tài)作軌跡運動,因此滑模控制得到了廣泛的應(yīng)用[1]。其穩(wěn)定性強,魯棒性較好,實現(xiàn)相對容易。
為實現(xiàn)對小車的平衡控制,文獻[2]將其平衡控制系統(tǒng)分解為2個子系統(tǒng),通過一個中間變量將2個子系統(tǒng)聯(lián)系起來,用1個控制量實現(xiàn)對小車的平衡控制。但這種傳統(tǒng)的分解滑模控制的局限性在于無論如何控制,系統(tǒng)狀態(tài)在滑動模態(tài)上無法在有限時間內(nèi)收斂至平衡點,且動態(tài)響應(yīng)速度較慢。文獻[3]提出引入模糊推理來調(diào)節(jié)線性滑模面的斜率參數(shù),一定程度上加快了動態(tài)響應(yīng)速度,卻仍然存在有限時間內(nèi)無法收斂的問題。
20世紀(jì)80年代,有學(xué)者提出終端滑模控制策略,通過引入非線性滑模面,系統(tǒng)狀態(tài)能在有限時間內(nèi)到達平衡點[4]。其缺點在于降低了收斂速度,且存在奇異性問題。通過增加線性項,快速終端滑模控制可以進一步改善收斂速度,但始終未能解決奇異性問題[5]。文獻[6]提出一種新型快速終端滑模控制法,它表明在選取適當(dāng)?shù)姆謹(jǐn)?shù)冪的情況下可以避免奇異性,且收斂速度較快。然而,對于階數(shù)較高的系統(tǒng),此類方法的終端滑模控制器設(shè)計復(fù)雜,計算機仿真耗時較長。
為解決欠驅(qū)動兩輪自平衡車的平衡控制問題,本文將分解滑模控制與新型快速終端滑模控制相結(jié)合,解決了有限時間收斂的問題。鑒于常值滑模面系數(shù)影響收斂速度,采用模糊推理法進一步調(diào)節(jié),加快了系統(tǒng)狀態(tài)響應(yīng)速度,表現(xiàn)出較好的魯棒性。此外,對于高階系統(tǒng)而言,本文的控制方法相對于普通終端滑模控制方法設(shè)計簡單,易于實現(xiàn)。
1 兩輪自平衡車的模型建立
兩輪自平衡車模型示意圖如圖1所示。

圖1 兩輪自平衡車模型示意圖
設(shè)R為左右車輪的半徑;mR=mRL=mRR為車輪質(zhì)量;mP為車體質(zhì)量;XRL、XRR為左右車輪的位移為車體的行駛速度(即ωP)為擺桿與垂直方向的夾角角度和角速度;θRL、θRR為左右車輪繞Z軸的轉(zhuǎn)角為車體繞Y軸的角度和角速度;D為兩車輪的間距;L為車體質(zhì)心到Z 軸的距離;JR=JRL=JRR,JPδ、JPθ分別為左右車輪的轉(zhuǎn)動慣量、車體繞Y軸的轉(zhuǎn)動慣量、車體繞通過質(zhì)心且平行于Z軸的轉(zhuǎn)動慣量。
采用基于能量的分析方法[7],選取車輪所在平面為零勢能面,得到小車系統(tǒng)的動能T和勢能V的方程:

系統(tǒng)的輸入功率和輸出功率為:

其中,CL、CR分別為電機對左、右車輪的轉(zhuǎn)矩。

為了便于建模,將系統(tǒng)在平衡點附近進行線性化處理,即在小角度的范圍內(nèi),取sinθP≈θP,cosθP≈1,忽略二次分量。基于上述方程,結(jié)合文獻[7]中系統(tǒng)所受約束條件,可以得到系統(tǒng)模型的方程組:

這里選取需要觀察的狀態(tài)變量為XRM、VRM、θP、
結(jié)合電機轉(zhuǎn)矩C和控制電壓U的關(guān)系:

其中,Km、Ke分別為電機力矩系數(shù)和電機反電動勢系數(shù)。
整個系統(tǒng)的狀態(tài)空間方程為:

其中


對系統(tǒng)解耦,并將(11)式代入,即


上述解耦得出的2個部分分別為小車的平衡控制部分與旋轉(zhuǎn)控制部分,可看作是相互獨立的,可分別對這2個部分進行控制。由于小車?yán)@Y軸旋轉(zhuǎn)的狀態(tài)矩陣為定值,也不存在干擾,控制相對容易,故本文重點研究平衡控制部分[8]。
2 控制器設(shè)計
將(12)式簡化為如下的系統(tǒng):
其中,x1=θP,x2=XRM,x3=ωP,x4=VRM;dθ(t)、dx(t)為外在的干擾,實際情況下它們都是具有上界的,即|dθ(t)|≤Dθ(t)、|dx(t)|≤Dx(t);fθ(X,t)、fx(X,t)、gθ(X,t)、gx(X,t)的值可以由(12)式推出。
2.1 傳統(tǒng)分解滑模控制器及其改進
將小車平衡控制部分分解為擺角子系統(tǒng)和位移子系統(tǒng)。擺角控制子系統(tǒng)記為子系統(tǒng)A,位移控制子系統(tǒng)記為子系統(tǒng)B。2個子系統(tǒng)的滑模面分別設(shè)計如下[2]:

其中,c1,c2>0;z與s2是成比例的,可看作一個有界衰減振蕩信號。定義:

其中,0<zu<1;|z|≤zu;φz為s2的邊界層厚度。顯然z是s2的函數(shù),當(dāng)s2→0時,有z→0。
平衡控制的目標(biāo)是控制擺角和位移漸進收斂為0。這里采用了分解控制的方法,引入能夠反映子系統(tǒng)B滑模面信息的中間變量z,將其引入到子系統(tǒng)A的滑模面中,用1個控制量控制2個子系統(tǒng),從而完成小車的平衡控制。此時,控制目標(biāo)從普通滑模控制的x1=0,x3=0轉(zhuǎn)變?yōu)閤1=z,x3=0。
根據(jù)Lyapunov定理,令滑模面s1的導(dǎo)數(shù)為0,即

對方程進行求解,暫不考慮dθ,并將(14)式代入,得到等效控制律:

考慮到整個系統(tǒng)的穩(wěn)定性,設(shè)計控制律為:

選取切換控制律:

于是總的控制律為:

其中,k>[Dθ(t)/|gθ|];φ1為s1的邊界層厚度,為正常數(shù)。飽和函數(shù)sat(·)用來抑制抖振現(xiàn)象,定義:

采用上述分解滑模控制器雖然能夠較好地實現(xiàn)對小車平衡控制部分的解耦控制,但缺陷在于其收斂速度慢,且系統(tǒng)狀態(tài)無法在有限時間內(nèi)收斂。文獻[3]使用模糊推理來調(diào)節(jié)滑模面系數(shù),對其進行了改進。其滑模面設(shè)計如下:

該方法針對傳統(tǒng)方法滑模面系數(shù)為常值的缺陷,制定了一維模糊規(guī)則,將子系統(tǒng)的2個狀態(tài)變量分別乘以比例系數(shù),利用其差值進行模糊推理,得到可變的系數(shù)和,其余設(shè)計與傳統(tǒng)方法類似,雖使得系統(tǒng)狀態(tài)相對較快地趨近至平衡點附近,但由于其采用線性滑模面,始終無法實現(xiàn)滑動模態(tài)上的系統(tǒng)狀態(tài)在有限時間內(nèi)到達平衡點。
2.2 基于模糊調(diào)節(jié)的終端滑模分解控制器
針對上述分解滑模控制法的系統(tǒng)狀態(tài)收斂速度較慢,不能在有限時間收斂至平衡點的缺點,本文采用一種新型快速終端滑模面[6]:

其中,ai,ci>0,i=1,2。結(jié)合分解控制,設(shè)計子系統(tǒng)A和子系統(tǒng)B的滑模面如下:

其中,0<γ1=p1/q1<1,0<γ2=p2/q2<1。p1、p2、q1、q2皆為正整數(shù),且為奇數(shù)。注意到當(dāng)(x1-z)<0,x2<0時,冪指數(shù)γ1,γ2使|x1-z|γ1∈R,|x2|γ2∈R,即不為虛數(shù),因而不存在普通終端滑模所出現(xiàn)的奇異性問題。
當(dāng)系統(tǒng)在滑動模態(tài)上時,有如下等式:


根據(jù)有限時間收斂的定義[9],求解上述微分方程,得到各個子系統(tǒng)狀態(tài)收斂的時間為:
其中,xz(0)為(x1-z)的初始值;x2(0)為x2的初始值。顯然狀態(tài)變量能在有限時間內(nèi)收斂。
為了實現(xiàn)控制目的,同樣使滑模面s1的導(dǎo)數(shù)等于0,即

暫不考慮dθ,將(14)式代入(33)式可得系統(tǒng)的等效控制律為:

考慮到(17)式中間變量z的求導(dǎo)不易于實現(xiàn)而造成分解滑模等效控制量無法直接求出的問題,這里采用一種新型的具有反正切函數(shù)形式的中間變量[10],即

同樣,當(dāng)s2→0時,有z→0。采用這樣的形式,z的導(dǎo)數(shù)可以直接求得,有

代入(36)式可得出控制律的具體表達式。
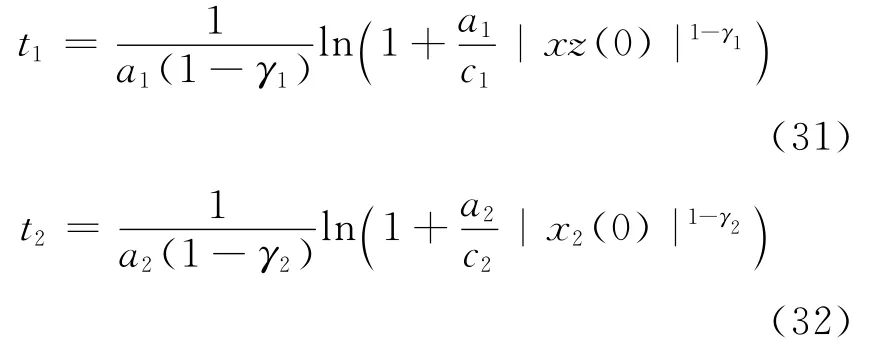
觀察(31)式、(32)式可以發(fā)現(xiàn),系統(tǒng)狀態(tài)收斂至平衡點的時間與參數(shù)ai、γi、ci(i=1,2)有關(guān)。其中當(dāng)ci減小時,時間變長;ci增大時,時間縮短,但會影響跟蹤的精確性。為了解決此矛盾,受文獻[11]啟發(fā)引入一維模糊推理來改善系統(tǒng)的性能,其原理如圖2如示。
圖2 模糊調(diào)節(jié)系數(shù)的原理圖
圖2中,li(i=1,2,…,6)為選取參數(shù)。FC表示模糊推理系統(tǒng),其輸入語言變量為Xd(t),對應(yīng)于變量=|lixi|-,輸出語言變量為C,對應(yīng)于變量=ci/li+4,其中i=1,2。模糊規(guī)則描述為:

其中,XDi用來表示輸入Xd(t)的模糊集{NB,NM,NS,ZO,PS,PM,PB}表示輸出C 的模糊集{VVS,VS,S,M,B,VB,VVB}。模糊規(guī)則表見表1所列。模糊控制器采用Mamdani型模糊推理系統(tǒng),其輸入XDi的論域為[-1,1],輸出的論域為[0,2]。輸入集和輸出集的隸屬函數(shù)采用均勻分布的三角形隸屬函數(shù),推理使用最大最小合成規(guī)則,解模糊采用重心法。

表1 模糊規(guī)則表
2.3 系統(tǒng)穩(wěn)定性的證明
由于滑模面s2中的狀態(tài)信息被轉(zhuǎn)移到滑模面s1中,故下面來證明s1的穩(wěn)定性。在系統(tǒng)的可控范圍內(nèi),構(gòu)造Lyapunov函數(shù):



將(36)式代入,化簡得:

因為k>Dθ(t)/|gθ|,所以無論s1為何值,始終能保證˙V為非正數(shù)。這表明所設(shè)計的滑模面s1是漸進穩(wěn)定的且能夠在有限時間內(nèi)到達。當(dāng)子系統(tǒng)A處于滑動模態(tài)s1=0時,有(x1-z)=0以及x3=0。另一方面,由(33)式得到:

此方程可看作一個關(guān)于x3的一階非齊次線性微分方程,對其求解得到:

其中,x3(0)為x3的初始值。顯然當(dāng)(x1-z)=0且=0時,x3收斂為0。因此,當(dāng)且僅當(dāng)z→0(即s2→0)時,有x3→0。故2個子系統(tǒng)的穩(wěn)定性都得到保證[3]。
3 仿 真
3.1 仿真參數(shù)選取
實際的模型參數(shù)為:

代入(12)式求得狀態(tài)方程:

對于不確定參數(shù)JPθ、JR、JPδ所引起的系統(tǒng)的最大不確定矩陣為則不確定性干擾表示為其中,α為[-11]的隨機數(shù);分別為:

控制器的參數(shù)選取如下:c1=2,c2=0.5,γ1=γ2=29/31,l1=l3=0.5,l5=2,l2=l4=0.5,l6=0.5,k=20,φ1=5,φz=15,a1=0.3,a2=0.1,zu=0.8。
3.2 仿真結(jié)果及分析
選取下面3種情形的控制器進行仿真,滑模面分別選擇為:
情形1 傳統(tǒng)分解滑模面,即

情形2 改進的傳統(tǒng)分解滑模面,即

情形3 本文設(shè)計的分解滑模面,即

這里就兩輪自平衡小車的擺角子系統(tǒng)平衡過程和位移子系統(tǒng)平衡過程進行仿真。假設(shè)系統(tǒng)的初始狀態(tài)為:θP=0.3,XRM=0,ωP=0,VRM=0。即初始擺角為0.3rad(17°),位移、角速度、速度均為0。在整個過程中引入系統(tǒng)不確定性干擾IJ,擺角和位移趨近平衡過程的仿真曲線控制律的變化曲線如圖3所示。


圖3 系統(tǒng)擺桿角度、位移響應(yīng)、控制律響應(yīng)曲線
經(jīng)模糊調(diào)節(jié)的滑模面系數(shù)曲線如圖4所示。

圖4 滑模面系數(shù)曲線
由圖3a中擺桿的角度曲線可以看出,本文所設(shè)計方法的角度在3.6s時達到穩(wěn)定,而傳統(tǒng)分解滑模控制及其改進后的方法所需的時間分別大于9s和5s,因此本文設(shè)計的方法明顯具有較快的動態(tài)響應(yīng)速度;還可以看出其超調(diào)量較小,跟蹤精度較高。圖3b中位移曲線同樣表明,本文所設(shè)計的方法響應(yīng)速度較快,能將位移保持在較小的距離范圍內(nèi)。從圖3c可以看出,系統(tǒng)的控制輸入的響應(yīng)速度也明顯更快。圖4體現(xiàn)小車在平衡過程中的變化情況,其到達穩(wěn)定常值之前的變化表明了模糊推理系統(tǒng)產(chǎn)生的調(diào)節(jié)作用,反映了對系統(tǒng)性能實時改善的過程。
4 結(jié)束語
本文針對兩輪自平衡車設(shè)計了一種新型控制方法。該方法將整個平衡控制系統(tǒng)分解為2個子系統(tǒng),并分別定義了新型快速終端滑模面函數(shù),利用可直接求導(dǎo)的中間變量實現(xiàn)1個控制量對小車的平衡控制,簡化了高階系統(tǒng)的設(shè)計,且能夠使系統(tǒng)狀態(tài)在有限時間內(nèi)收斂至平衡點。在此基礎(chǔ)上,運用模糊推理法調(diào)節(jié)滑模面系數(shù),明顯改善了動態(tài)響應(yīng)速度。仿真結(jié)果也表明此控制方法能夠獲得較好的動態(tài)特性和具有較強的魯棒性。
[1]劉金琨,孫富春.滑模變結(jié)構(gòu)控制理論及其算法研究與進展[J].控制理論與應(yīng)用,2007,24(3):407-408.
[2]Lo J C,Kuo Y H.Decoupled fuzzy sliding-mode control[J].IEEE Trans Fuzzy System,1998,6(3):426-435.
[3]Yongancloˇglu F,Kmrcgil H.Decoupled sliding-mode controller based on time-varing sliding surface for fourth-order systems[J].Expert Systems with Applications,2010,37(10):6764-6774.
[4]Zak M.Terminal attactors for addressable memory in neural networks[J].Phys Lett A,1988,133(1-2):18-22.
[5]Yu X,Man Z H.Fast terminal sliding-mode control design for nonlinear dynamic system[J],IEEE Trans Circuits Syst I,2002,49(2):261-264.
[6]Yu S,Yu X,Shirinzadeh B,Man Z.Continuous finite-time control for robotic manipulators with terminal sliding mode[J].Automatica,2005,41(11):1957-1964.
[7]張華賓.兩輪移動式倒立擺機器人的研究[D].合肥:中國科學(xué)技術(shù)大學(xué),2007.
[8]楊興明,楊傳偉,馬文森.一類欠驅(qū)動系統(tǒng)的全局改進積分模糊滑模控制[J].合肥工業(yè)大學(xué)學(xué)報:自然科學(xué)版,2013,36(8):923-928.
[9]Man Z H,Yu X H.Terminal sliding mode control of MIMO linear systems[C]//Proceedings of the 35th Conference on Decision and Control.Kobe,Japan:IEEE Press,1996:4619-4620.
[10]于 濤,孫漢旭,賈慶軒,等.一類欠驅(qū)動系統(tǒng)的解耦滑模控制方法[J].東南大學(xué)學(xué)報:自然科學(xué)版,2012,42:11-14.
[11]Yongancloˇglu F,Kmrcgil H.Single-input fuzzy-like moving sliding surface approach to the sliding mode control[J].Electrical Engineering,2008,90(3):199-207.
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
藝術(shù)啟蒙(2018年7期)2018-08-23 09:14:18
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年4期)2015-05-19 14:47:56