高動態GNSS接收機載波跟蹤環自適應最優帶寬設計與試驗
2014-10-21 01:15:36唐康華武成鋒何曉峰
中國慣性技術學報 2014年4期
唐康華,武成鋒,杜 亮,何曉峰
(1. 國防科學技術大學 機電工程與自動化學院,長沙 410073;2. 北京自動化控制設備研究所,北京 100074;3. 宜昌測試技術研究所,宜昌 443003)
高動態GNSS接收機載波跟蹤環自適應最優帶寬設計與試驗
唐康華1,武成鋒2,杜 亮3,何曉峰1
(1. 國防科學技術大學 機電工程與自動化學院,長沙 410073;2. 北京自動化控制設備研究所,北京 100074;3. 宜昌測試技術研究所,宜昌 443003)
對于大多數高動態接收機,通常采用2階FLL輔助的3階PLL環路結構,由于存在FLL環路,導致跟蹤精度的下降。針對衛星接收機的動態性能和信號載波功率噪聲密度比,在綜合考慮接收機跟蹤環路中的各種誤差源(熱噪聲、晶振誤差、動態牽引誤差等)的基礎上,采用自適應最優帶寬技術,設計一種適用于高動態的3階PLL載波跟蹤環。采用基于GPS數字中頻信號的數字仿真和GNSS信號源對所設計的自適應最優帶寬進行了驗證,驗證結果表明:在加速度為 30g、過程中存在加加速度為30g/s的高動態情況下,采用18 Hz 3階PLL不能對信號進行跟蹤,而采用所設計的自適應最優帶寬的3階PLL環可以對信號進行可靠的跟蹤;同時,和固定帶寬接收機比較,所設計載波跟蹤環環路能夠跟蹤50g的高動態Compass衛星信號,而采用固定帶寬接收機失鎖,并且定位精度優于1 m(2σ),測速精度優于0.2 m/s(2σ)。
GNSS接收機;自適應最優跟蹤帶寬;載波跟蹤環;高動態條件;信號載波功率噪聲密度比
衛星導航定位系統是一種天基無線電導航系統,它通過測量若干顆已知星歷的衛星至用戶接收設備間的無線電延時來確定用戶的位置。衛星導航定位系統能夠在全球范圍內,為多用戶全天候、實時、連續地提供高精度的三維位置、速度及時間信息(Position, Velocity and Time,PVT),具有很強的軍事用途和廣闊的民用前景,許多國家和國際機構均大力開展這方面的研究。目前已經投入運營或正在建設的幾個主要的衛星導航系統有:美國的全球定位系統(Global Positioning System,GPS)、俄羅斯的全球導航衛星系統(GLObal NAvigation Satellites System,GLONASS)、歐洲在建的伽利略全球衛星導航系統(GALILEO)、中國的“北斗”導航定位系統(BeiDou Navigation Satellite System,BDS)。自2000年我國建成北斗導航試驗系統(“北斗一代”)以來,該系統已成功應用于測繪、電信、水利、漁業、交通運輸、森林防火、減災救災和公共安全等諸多領域,產生顯著的經濟效益和社會效益。2012年12月27日,北斗系統空間信號接口控制文件正式版正式公布,北斗導航業務正式對亞太地區提供無源定位、導航、授時服務。北斗導航系統建設的下一個目標是,2020年左右,北斗衛星導航系統形成全球覆蓋能力。
接收機按照應用場景大致可以分為高動態、高靈敏度、高精度三類,分別側重于動態跟蹤能力、跟蹤靈敏度和跟蹤精度。高動態接收機設計的主要難點就是載波環跟蹤算法。GNSS接收機跟蹤環的跟蹤誤差主要包括熱噪聲、晶振相位噪聲、電離層閃爍引起的相位噪聲和動態牽引誤差。在進行GNSS接收機帶寬設計時,需要折衷考慮這些因素:一方面,由于熱噪聲或干擾的原因要求窄的跟蹤帶寬,另一方面,由于載體動態性能的考慮要求寬的跟蹤帶寬[1-2]。文獻[1]提出了一種GPS接收機環路帶寬的最優設計方法,并給出了最優帶寬的表達式,但是僅考慮了熱噪聲和動態牽引誤差的影響。頻率鎖定環(Frequency Lock Loop, FLL)輔助的鎖相環(Phase Lock Loop,PLL)被廣泛應用于高動態GNSS接收機[4-5],由于帶寬窄,在低動態條件下可以獲得較好的跟蹤性能,但是在高動態條件下需要切換到FLL,導致跟蹤精度的下降。基于輸入信號的自適應帶寬設計是提高跟蹤性能的有效措施之一[6-11],可以有效提高低動態情形下的跟蹤性能,但是沒有高動態方面的報道。
本文以GNSS接收機高動態應用為背景,設計了適用于高動態的GNSS接收機3階自適應最優帶寬載波鎖相跟蹤環路,最后采用高動態GPS數字中頻數據和GNSS信號源生成的GPS及Compass B3頻點數據,驗證了算法的有效性。
1 高動態GNSS接收機自適應載波跟蹤環路結構
為了適合于高動態應用場景,同時保證跟蹤精度,載波跟蹤環采取三階自適應PLL,結構如圖1所。
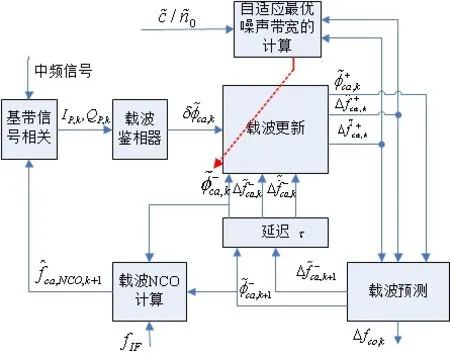
圖1 三階自適應最優帶寬載波鎖相環結構圖Fig.1 Adaptive optimal bandwidth 3rd-order PLL
在圖1中的三階載波跟蹤鎖相環載波更新公式如下[12]:

而載波預測的公式為:

式中,τ為環路更新時間間隔, fIF為中頻頻率,φk為第k時刻的載波相位, Δfk為第k時刻的多普勒頻移,為第k時刻的多普勒頻移率,δφk為鎖相環鑒相器的輸出,采用二象限反正切鑒相器 δφk= a tan (QkIk),上標“-”表示預測,上標“+”表示更新,K1、K2、K3為三階鎖相環參數。
三階鎖相環參數計算公式如下[13]:

于是環路帶寬B表示為:

從式(3)和式(4)可知,一旦環路的噪聲帶寬確定,則3階環的各系數就能確定。根據載體動態性和載波噪聲功率密度比來自適應的選擇環路的最優帶寬。
2 載波跟蹤環路自適應最優帶寬設計
環路帶寬由環路的熱噪聲、衛星的運動、載體動態性等來決定。最優帶寬是輸入信號信噪比的函數,一般根據估計的信噪比來確定最優帶寬,總的PLL跟蹤誤差可以表示為[13-14]:
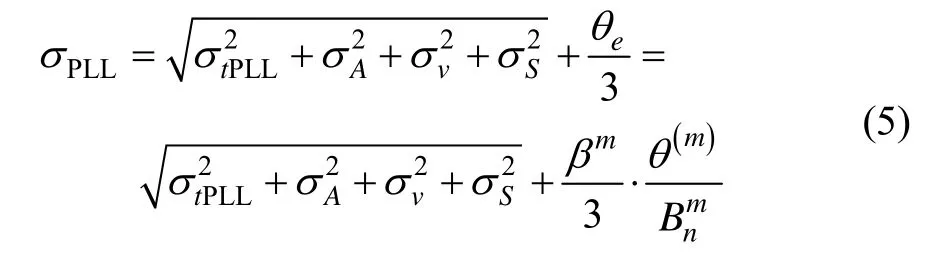
式中, σtPLL為熱噪聲引入的誤差; σA振蕩器 Allan方差引入的相位噪聲;σv振動引入的相位噪聲;σS為電離層閃爍引入的相位噪聲; θ(m)為載波跟蹤環中接收機動態引入的誤差,中接收機動態引入的誤差,且θ(m)= dθmdtm,它們的表達式見參考文獻[13]。
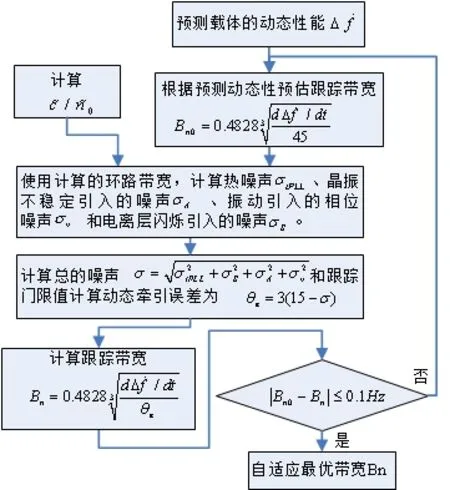
圖2 3階PLL自適應最優帶寬的計算流程圖Fig.2 Calculation flowchart of adaptive optimal bandwidth
根據載波預測的公式(2)可以預測接收機的動態性能。而在衛星接收機中,可以根據基帶 I、Q測量信息確定接收機接收的信號噪聲功率密度比 CN0,計算結果累加n次后取均值為[12]:
式中, IP,k、QP,k和 IN,k在 τa內累加。取期望得:

得出:

由式(8)可得到 CN0。
根據接收機動態性能的預測和 CN0,并且綜合考慮各種誤差因素時,3階跟蹤環路自適應最優帶寬求解方法如圖2所示。
3 試驗研究
3.1 基于信號模擬器的數字仿真
采用GNSS信號模擬器、射頻前端、高速數據采集卡,采集GNSS中頻數據,并存盤。GNSS信號模擬器為某單位研制的GPS L1和Compass B3兼容型信號模擬器。采集高動態GNSS信號模擬器輸出GPS L1高動態中頻數據和Compass高動態B3中頻數據,來驗證自適應最優帶寬跟蹤環路性能。GNSS高動態信號跟蹤測試如圖3所示。
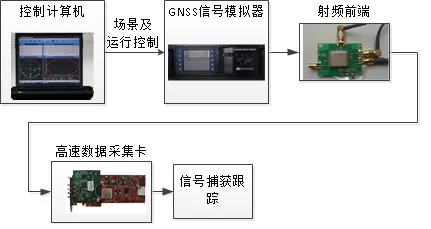
圖3 基于信號模擬器的GNSS信號跟蹤測試圖Fig.3 GNSS signal tracking test based on GNSS simulator
1) 基于GPS中頻數據高動態驗證
在基于GNSS信號模擬器的GPS L1頻點中頻數據數字仿真中,設高動態載體至衛星的初始速度為2400 m/s、加速度為 30g、加加速度初始為 0g/s,在t=500 ms開始加加速度為30g/s。接收機至衛星的動態特性如圖4所示。
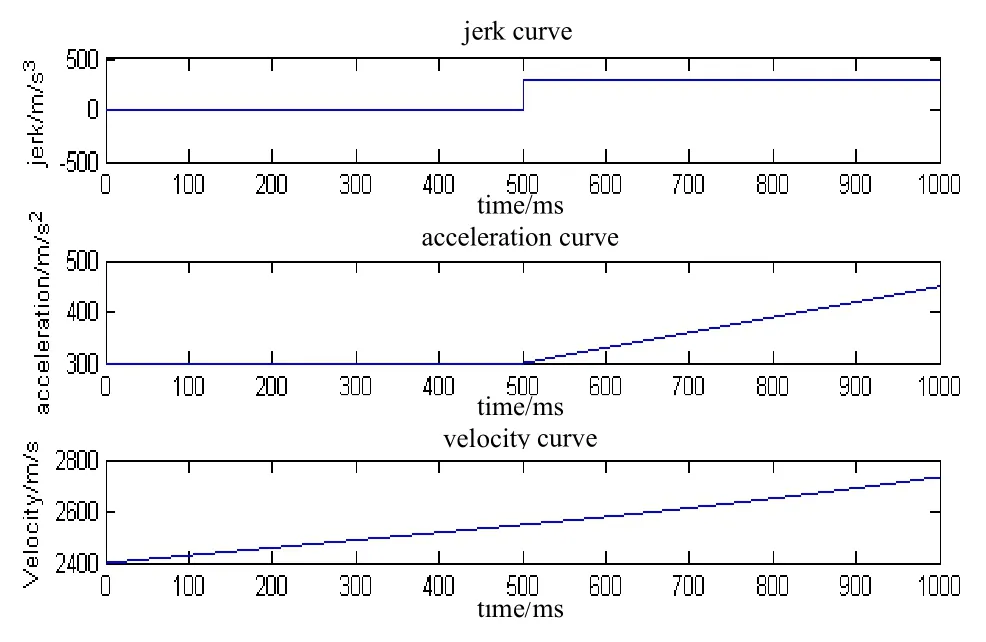
圖4 接收機高動態特性Fig.4 GNSS receiver dynamic characteristic
(a) 取1000 ms仿真器產生的高動態數據,用3階PLL進行跟蹤試驗,3階PLL環路的帶寬設計為18 Hz,跟蹤結果如圖5所示。
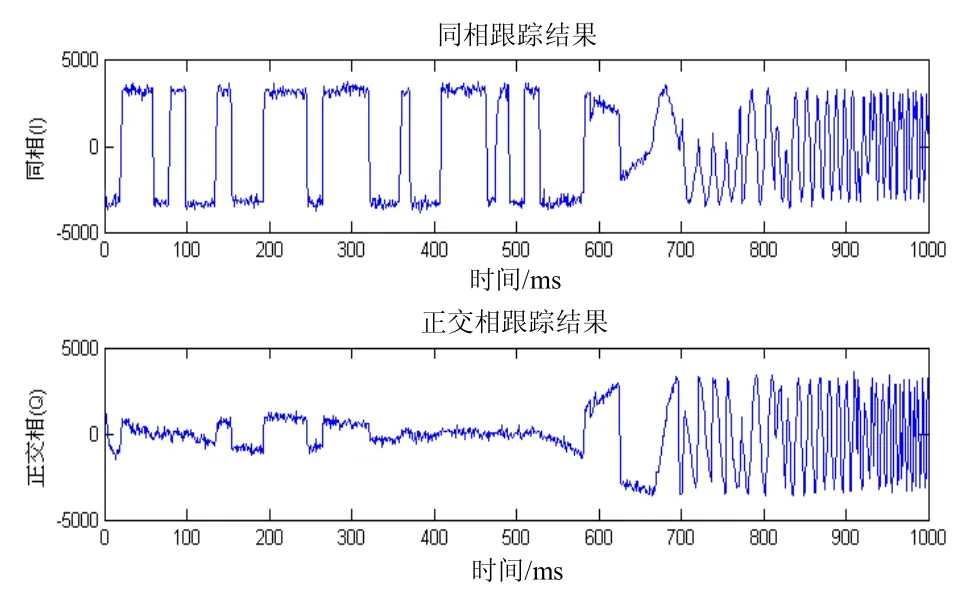
圖5 采用固定帶寬3階PLL跟蹤結果Fig.5 Tracking results by using fixed-bandwidth
從圖5可以看出,在前500 ms時,采用18 Hz 3階PLL可以對高動態信號進行跟蹤,而在后500 ms,由于存在30g/s加加速度,采用18 Hz 3階PLL不能對信號進行跟蹤。
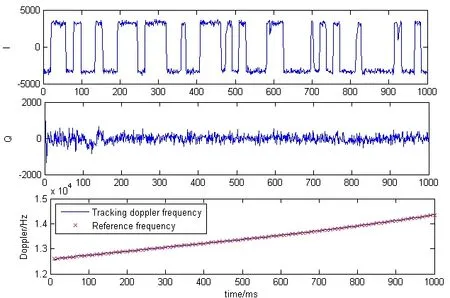
圖6 采用自適應帶寬3階PLL跟蹤結果Fig.6 Tracking results by using adaptive optimal bandwidth
(b) 用3階自適應帶寬PLL對信號進行跟蹤,開始帶寬設計為18 Hz,后根據接收機預測的動態性能將帶寬自適應調整,跟蹤結果如圖6所示。
從圖6可以看出,在加速度為30g、500 ms后加加速度為30g/s的高動態情況下,采用所設計的自適應最優帶寬3階PLL環可以對信號進行可靠的跟蹤。
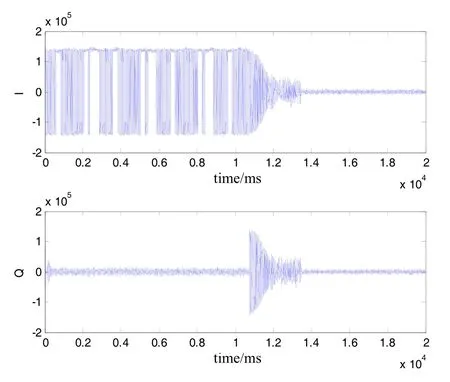
圖7 采用固定帶寬3階PLL跟蹤結果Fig.7 Tracking results using fixed-bandwidth
2) 基于Compass B3頻點中頻數據高動態驗證
基于GNSS模擬器采集Compass B3頻點中頻數據,模擬器中設定載體初始靜止,仿真開始10 s后,在東、北、天三個方向均以50g左右加速度運動,合加速度為100g,持續時間為5 s,信號強度為-133dBm。
(a) 用3階PLL進行跟蹤試驗,3階PLL環路的帶寬設計為18 Hz,跟蹤結果如圖7所示。
從圖7可以看出,由于10 s后的動態性能,采用18 Hz 3階PLL不能對信號進行跟蹤。
(b) 現用3階自適應帶寬PLL對信號進行跟蹤,三階采用自適應最優跟蹤帶寬,開始帶寬設計為 18 Hz,后根據接收機預測的動態性能將帶寬自適應調整,跟蹤結果如圖8所示。
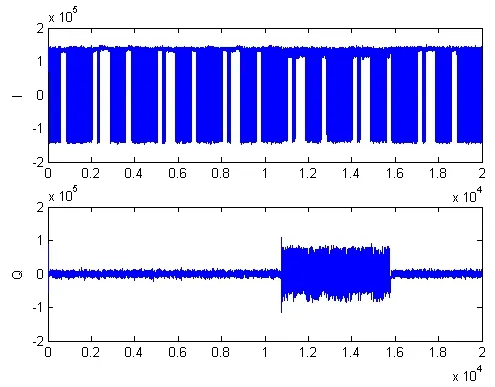
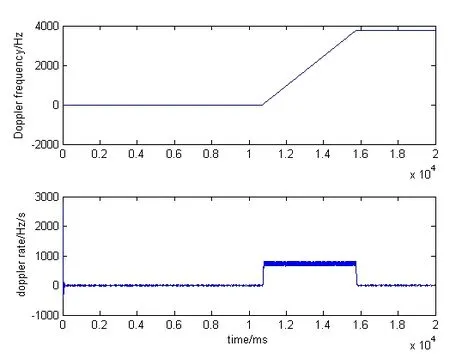
圖8 采用自適應帶寬3階PLL跟蹤結果Fig.8 Tracking results by using adaptive optimal bandwidth
從圖8中可以看出,采用所設計自適應最優帶寬3階PLL環能夠對高動態Compass B3信號進行跟蹤。
3.2 信號源上的高動態定位測試
為了進一步驗證所設計算法,基于某公司的Compass接收機設計平臺,構建了Compass接收機試驗系統,測試系統如圖9所示。在圖9中,Compass接收機僅包含射頻、基帶和導航信息處理部分。采用GNSS信號模擬器,對Compass接收機進行測試,測試高動態接收機的定位精度。
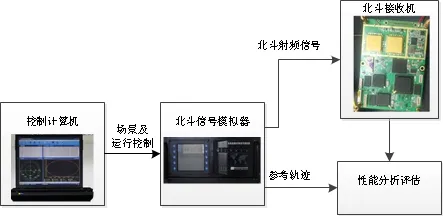
圖9 基于信號模擬器北斗接收機測試系統Fig.9 Test system by using GNSS signal simulator
GNSS信號模擬器提供Compass B3頻點的原始射頻信號與軌跡基準信息,用于評價設計接收機的性能。為了驗證所設計算法的性能,設計的場景的初始位置(地理系):緯度 28.2293N,經度 112.9916E,高度500 000 m;初始速度為0,初始加速度為0;仿真時長為1000 s。載體在與當地水平面垂直的平面內作圓周運動。該場景最大瞬時加加速度為5g/s,最大加速度為50g。實際軌跡在ECEF下的曲線如圖10所示。
在圖10中,運動場景在1~300 s時間內靜止,從301~1000 s載體以R=50 km、W=0.1 rad/s作勻速圓周運動,為避免由靜止轉圓周運動時運動參數的突變,設置角速度按指數函數形式緩慢增大,對時間的函數分別是 ω= 0.1× (1 - e-Δt/τ),其中, τ= 50。
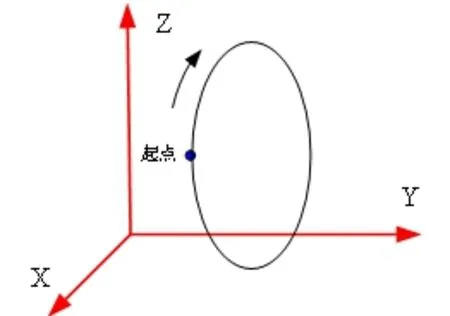
圖10 垂直面圓周運動場景示意圖Fig.10 Trajectory of vertical circle movement
根據運動場景,以參考軌跡為基準, BD接收及分別采用18 Hz固定帶寬和自適應帶寬,其中采用18 Hz固定帶寬測試結果如圖11所示。
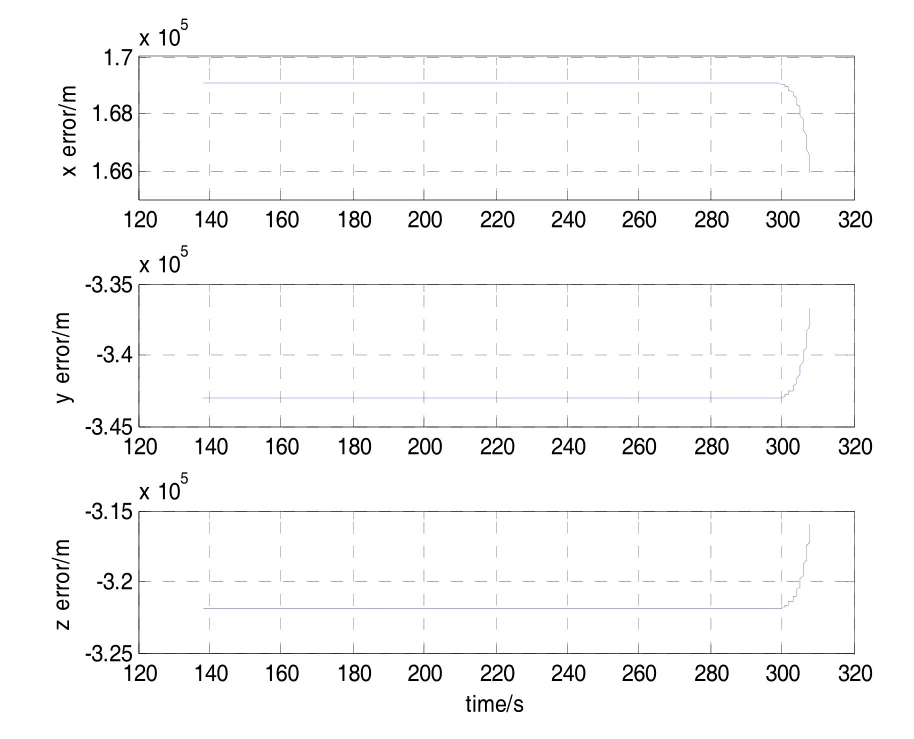
圖11 采用固定帶寬3階PLL定位誤差結果Fig.11 Positioning error results by using fixed-bandwidth
從圖11可以看出,Compass接收機采用18 Hz固定帶寬,則在前300 s靜態時能夠定位,在300 s后的動態場景時則接收機失鎖。
Compass接收機采用自適應帶寬,測試結果如圖12所示。
根據圖12,測試接收機定位測速精度如表1所示。
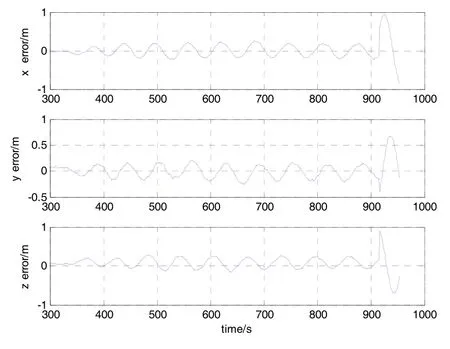
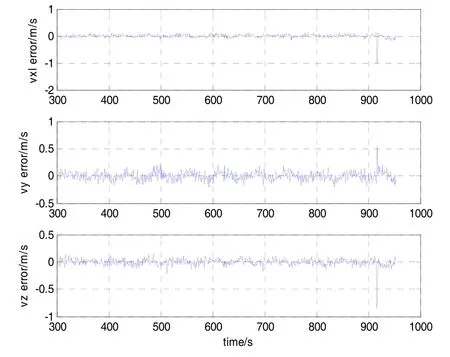
圖12 采用自適應帶寬接收機的定位、測速誤差結果Fig.12 Position and velocity error by using adaptive bandwidth
根據圖12和表1 ,采用所設計載波跟蹤環環路的Compass接收機能夠跟蹤50g、5g/s的高動態衛星信號,并且定位精度優于1 m(2σ),測速精度優于0.2 m/s(2σ)。
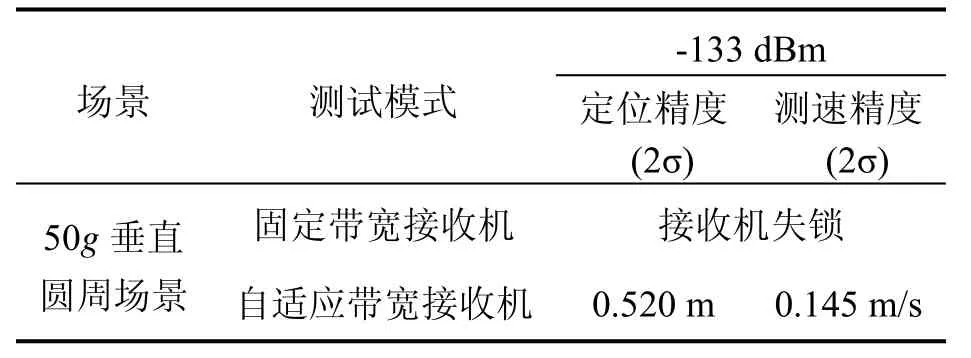
表1 高動態接收機定位、測速精度Tab.1 Results of position and velocity errors
4 結 論
針對衛星接收機的動態性能和信號強度,在綜合考慮接收機跟蹤環路中的各種誤差源(熱噪聲、晶振誤差、動態牽引誤差等)的基礎上,設計了一種適合于高動態的GNSS自適應3階載波環路結構。采用迭代的方法設計3階PLL的最優帶寬,根據載體的動態性能和接收機接收到衛星信號強度自適應調整環路的帶寬。論文的結論如下:
1)基于GPS L1頻點信號,采用GNSS信號模擬器對所設計的算法進行了驗證,驗證結果表明:在加速度為30g、存在加加速度為30g/s的高動態情況下,采用所設計的3階自適應最優帶寬PLL環可以對信號進行可靠的跟蹤。
2)基于Compass B3頻點信號,采用GNSS信號模擬器對設計的算法進行了驗證,驗證結果表明,在高動態條件下所設計自適應最優帶寬 3階 PLL環對Compass B3信號進行可靠跟蹤。
3)為了驗證定位性能,基于Compass B3頻點信號,采用GNSS信號模擬器,構建Compass接收機系統,所設計載波跟蹤環路能夠跟蹤50g的高動態衛星信號,而采用18 Hz固定帶寬接收機失鎖,并且定位精度優于1 m(2σ),測速精度優于0.2 m/s(2σ)。
(References):
[1] Kazemi P L. Optimum Digital Filters for GNSS Tracking Loops[C]//Proceedings of the ION GNSS 2008, Virginia VA: The Institute of Navigation , Inc. , 2008. 2304-2313.
[2] Kazemi P L, O’Driscoll C, Lachapelle G. Digital phase locked loop with frequency rate feedback[C]// Proceedings of the ION GNSS 2009, Virginia VA: The Institute of Navigation, Inc. , 2009: 201-208.
[3] Jwo D J. Optimisation and sensitivity analysis of GPS receiver tracking loops in dynamic environment[J]. IEE Proc. –Radar, Sonar Navigation, 2001, 148(4): 241250.
[4] Jovancevic A, Brown A, Ganguly S, et al. Real-time dual frequency software receiver[C]//Proceeding of ION GPS 2003. Virginia VA: The Institute of Navigation, Inc. , 2003: 2572-2583.
[5] QIN H L, Liu Y, JIN T. A novel adaptive EKF GNSS weak signal tracking algorithm[C]//Proceeding of ION GNSS 2009. Virginia VA: The Institute of Navigation, Inc. , 2009: 1082-1089.
[6] Ping Lian. Improving tracking performance of PLL in high dynamic applications[D]. Calgary: The University of Calgary, 2006.
[7] Legrand F, Macabiau C. Improvement of pseudorange measurements accuracy by using fast adaptive bandwidth lock loops[C]//Proceeding of ION GPS 2001. Virginia VA: The Institute of Navigation, Inc., 2001: 2346-2356.
[8] Tsujii T, Fujiwara T, Suganuma Y, et al. Development of INS-aided GPS tracking loop and preliminary flight test[C]//ICROS-SICE. Fukuoka, Japan, 2009: 3585-3590. [9] Kiesel S, Ascher C, Daniel G, et al. GNSS receiver with vector based FLL-Assisted PLL carrier tracking loop[C]// Proceeding of ION GPS 2008. Virginia VA: The Institute of Navigation, Inc., 2008: 197-203.
[10] Legrand F, Macabiau C. Results of the implementation of the fast adaptive bandwidth lock loops on a real GPS receiver in a high dynamics context[C]//GNSS 2001 International Symposium, 2001: 1-6.
[11] Gao Guojiang. INS-assisted high sensitivity GPS receivers for degraded signal navigation[D]. Calgary: The University of Calgary, 2007.
[12] Groves P D. Principles of GNSS, inertial, and multisensor integrated navigation systems[M]. Artech House, London, 2008.
[13] Kaplan E D, Hegarty C J. Understanding GPS principles and applications[M]. 2nd Ed. Artech House, London, 2006.
[14] Ward P W, Betz J W, Hegarty C J. Understanding GPS principles and applications[M]. 2nd ed. Artech House Mobile Communications Series, 2006.
Experimental study and design on high dynamic GNSS receiver using adaptive optimal bandwidth for carrier tracking loop
TANG Kang-hua1, WU Cheng-feng2, DU Liang3, HE Xiao-feng1
(1. College of Mechatronics and Automation, National University of Defense Technology, Changsha 410073, China; 2. Beijing Institute of Automatic Control Equipment, Beijing 100074, China; 3. Yichang Testing Technology Research Institute, Yichang 443003, China)
For most GNSS receiver designs in high dynamic application, a second-order FLL aided 3rd order PLL is usually adopted as carrier tracking loop. Based on GNSS receiver dynamics and carrier power-tonoise density, the structure of GNSS receiver 3rd order PLL tracking loop for high dynamic applications was designed by using the adaptive optimal bandwidth method and taking the tracking errors(such as thermal noise, oscillator phase noise, dynamic stress error) into account. According to the designed adaptive optimal bandwidth method of the 3rd order PLL tracking loop, the digital simulation and test based GNSS simulator were performed. Simulation results show that on the condition of 30g line-of-sight acceleration and 30g/s jerk high dynamics, the designed adaptive optimal bandwidth method can track GNSS signal well, but when using the 18 Hz fixed-bandwidth 3rd order PLL, carrier tracking lock will be lost. When using the GNSS simulator, test results show that the designed adaptive optimal bandwidth method can track 50g high dynamic compass signal, but the 18 Hz fixed-bandwidth compass receiver tracking lock will be lost. And position accuracy can reach about 1 m(2σ), velocity accuracy can reach about 0.2 m/s(2σ).
GNSS receiver; adaptive optimal bandwidth; carrier tracking loop; high dynamic; carrier power-tonoise density
唐康華(1976—),男,講師,工學博士,從事組合導航研究。E-mail:tt_kanghua@hotmail.com
1005-6734(2014)04-0498-06
10.13695/j.cnki.12-1222/o3.2014.04.014
U666.1
A
2014-01-09;
2014-04-21
國家自然科學基金項目(61104201)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
中國生殖健康(2019年3期)2019-02-01 06:12:26
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00