慣性輔助的多段重合P碼快速直接捕獲方法
2014-10-21 01:15:36李榮冰劉建業
中國慣性技術學報 2014年4期
李榮冰,徐 昭,曹 進,劉建業
(南京航空航天大學 導航研究中心,南京 210016)
慣性輔助的多段重合P碼快速直接捕獲方法
李榮冰,徐 昭,曹 進,劉建業
(南京航空航天大學 導航研究中心,南京 210016)
為滿足復雜環境下快速高精度定位的需求,針對傳統P碼捕獲方法存在信號檢測概率與捕獲速率低的問題,設計了多段重合折疊的P碼處理方法,對本地碼序列進行折疊預處理,有效增加了相同長度本地碼的信息利用率,提高相關運算處理效率。提出慣性輔助多段重合折疊的P碼直接捕獲方法,采用慣性輔助信息縮小多普勒頻率搜索范圍,同時自動調整相關控制參數,實現高動態及弱信號環境下P碼的快速捕獲。仿真分析表明,此方法能有效提高了P碼捕獲效率,尤其在高動態狀態下能有效提高對衛星信號檢測能力,在載噪比為30~40 dB·Hz的環境下,利用慣性輔助P碼的方式能使捕獲概率可提高10%,捕獲時間可減少30%左右。
P碼;慣性系統;直接捕獲;組合導航
P碼具有更高的擴頻增益、更強的抗干擾與防欺騙能力,可以有效提高衛星接收機防欺騙和抗干擾能力,并獲得高精度導航定位信息,廣泛應用于美國的軍事領域[1]。然而由于P碼周期長、碼速率高的特性,導致捕獲過程中碼相關計算量過大,難以實現衛星導航擴頻信號的快速捕獲,從而影響衛星接收機性能 P碼的傳統捕獲方法是利用C/A碼捕獲后從星歷中獲取精確的時間計數信息,在縮短P碼相位的搜索空間的基礎上,實現P碼的捕獲。傳統捕獲方法在C/A碼受到干擾無法捕獲時,便無法實現P碼捕獲[2],因此,盡管P碼具有更好的抗干擾性,但在干擾環境下基于P碼進行定位導航的接收機依賴于C/A碼捕獲性能,這一問題在 P碼接收機因干擾或高動態導致信號失鎖后的重捕獲中同樣存在。對 P碼信號的捕獲目前已開始從傳統C/A碼間接捕獲P碼[3]過渡到直接捕獲P碼[4]。隨著軍事應用需求的日漸增加,受碼序列長捕獲效率低與高動態環境影響,P碼快速捕獲方法得到廣泛關注和研究[5]。
P碼直接捕獲技術的關鍵和難點是如何應對碼長及碼速率帶來的計算量問題。提高P碼直接捕獲效率的文獻主要從時域和頻域兩方面展開,時域處理方面主要依靠匹配濾波器、滑動相關器等硬件并行處理實現計算量的有效分配,頻域方面主要針對本地碼和接收信號進行一些處理,減少相關計算量。文獻[6]研究基于匹配濾波器法與FFT結合的全并行相關器,通過硬件代價提高捕獲速度。文獻[7]研究了直接平均算法,通過對多點序列求和取平均值來減少數據相關處理數目提高捕獲效率,由于噪聲變為乘性,低信噪比條件下算法性能惡化嚴重。文獻[8]研究了XFAST(本地碼擴展重疊)技術,通過對序列段進行分割,結合FFT作循環相關估計出粗頻偏值,實現頻率與碼相位的聯合捕獲。文獻[9]結合多種頻域捕獲算法的重疊平均法進一步降低計算復雜度并提高處理速度,并提高頻率精度及低信噪比下的捕獲概率[10]。
上述算法在計算量減少方面有一定效果,但是無法滿足考慮高動態及低載噪比情況下直接捕獲性能需求。本文基于頻域算法的結構上,提出一種慣性導航信息輔助的多段重合折疊P碼直接捕獲方法,利用慣性導航系統的輸出信息來預測高動態下頻率偏移范圍[11],同時通過提高頻率估計的精度提高信號檢測概率,同時多段重合折疊有效合并了碼序列相關處理長度提高處理效率,并通過相干累加提高捕獲靈敏度,實現高精度與高效率的 P碼直接捕獲。仿真結果表明本方法可以有效的改善P碼直接捕獲性能,且具有較低的復雜度。
1 P碼直接捕獲技術分析
衛星通過BPSK調制方式產生出不同衛星的PRN碼序列,用來區分不同衛星編號,使得每顆導航衛星產生信號具有唯一性,可以將任意第i顆衛星發射的信號表示為:
式中,PC、PPL1和 PPL1表示C/A碼信號或P碼信號的功率密度, Ci與 Pi分別代表第i顆衛星的C/A碼信號序列或P碼信號信號序列,δL1與 δL2表示L1和L2載波相位的初始值,其信號參數如表1所示。

表1 GPS P碼信號參數Tab.1 Parameters of P code
P碼直捕的目的是通過調整本地載波與碼信號相位,并與輸入信號進行相關處理獲取輸入信號的載波頻率與碼相位信息,為跟蹤提供初始信息。針對高動態帶來的問題:① 碼偏移率動態變化會增加碼相關函數信號損耗;② 碼頻偏增加會使捕獲與跟蹤的相位測量誤差增加,精度下降;③ 載波頻偏增大會增加信號損耗,同時降低捕獲與跟蹤的頻率精度;④ 大頻偏及其變化率會導致信號同步失效。本文提出一種慣性信息輔助P碼多段重合折疊直捕方法,減少P碼捕獲時間,提高信號檢測概率。
2 慣性輔助多段重合折疊P碼捕獲模型設計
衛星信號的捕獲過程本質是對載波信號多普勒頻移與碼相位(時間)二維的相關搜索,為實現快速有效的搜索,開展基于FFT的時域和頻域相關處理方法的研究。
1)時域處理方法研究
利用,時域卷積與頻域共軛相乘在數學中的等效關系;通過時頻變換,將接收信號與本地產生P碼序列進行轉換,在頻域中完成相關運算,實現信號快速捕獲。其相關運算式可表示為[12-13]:
時域:
頻域:
2)頻域處理方法研究
頻域處理的優勢,是將信號在頻域作FFT處理,以增加資源來減少處理時間,提高單次相關碼長度與頻率的搜索效率。同時,消除噪聲對頻域處理的影響。頻域處理存在檢測損耗,其大小由累積時間 Tv與相關點數M決定,合理選取單次處理的時間長度T(頻率分辨率f),可以有效減少信號損耗,其關系式:

采用頻域相關的方法,可快速完成載波誤差補償值的確定,有利于提高處理數據速度與捕獲載波誤差精度。
2.1 多段重合折疊P碼捕獲方法設計
考慮到基準時鐘精度與信號傳輸延遲等產生的時間誤差,造成較大的P碼相位不確度,因此,為提高接收機的搜索效率,對本地及接收信號進行相應的預處理,從而加快處理速度,提高捕獲的實時性。預處理過程包含對于兩個子序列的疊加、取平均、分段折疊相加等,將信號序列進行有效提取,使得一次搜索范圍擴大,大大減少計算量,提高計算效率。其折疊預處理過程如圖1所示。選取相鄰兩段長為m的信號進行疊加,進而對疊加后的信號序列進行每k點取平均處理,信號長度變為m/k,進而將信號分為M段,每段長為L,將M段信號序列對應進行疊加。最終將長2 m的信號序列處理為2 m/k/M長的序列。較XFAST算法減少了約為2k的計算量,大大提高計算效率。
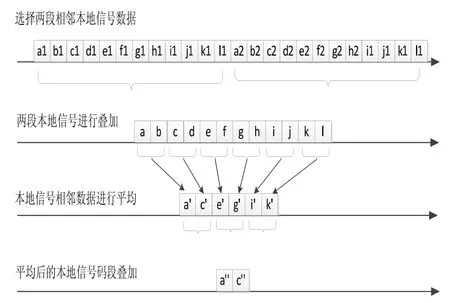
圖1 折疊捕獲算法預處理思路Fig.1 Folding preprocessing of local P code
本地信號序列預處理將T時刻經過降頻抽樣等預處理后的接收信號數據序列表示為s接= [s1, s1,… , sm-1, sm];本地產生兩路延遲時間為τ的P碼序列,在T時刻的本地子序列為 lT=[p1,p2,…, pm-1,pm],在T+τ時刻的子序列為 lT+τ=[f1,f2,…, fm-1,fm];設取均值數目為k,則每個子序列變量數目為n=m/k,因此本地均值處理后為l相= [e1,e2,… , en-1,en],接收信號經均值處理后s接= [s1,s1,…, sn-1,sn]。
由于本地序列經過多段重合處理后為:

同理,接收信號序列值:
將長 n的兩序列作折疊成 M段后(每段長度為L=n/M),則本地序列可表示: hlocal=[h1, h2,… ,hM],對本地折疊后的 hlocal序列信號進行對應位相加,生成長度為n/M的序列 Δhlocal:

對折疊相加后的本地序列作FFT變換:

同樣,將接收序列分成M段則有rrec=[r1,r2,…,rM],每次延遲L/2取L長度進行FFT變換,則式表示為:
將兩路對應序列進行完FFT頻域處理后,取本地序列的共軛值后,將其與接收序列作共軛乘,最后將結果作IFFT變換處理,表示為:
其兩路經折疊序列作循環相關運算如圖2所示。由于本地信號經過折疊預處理過程,相同長度本地碼段比接收信號段多包含2M倍信息,算法可以有效提高捕獲效率。
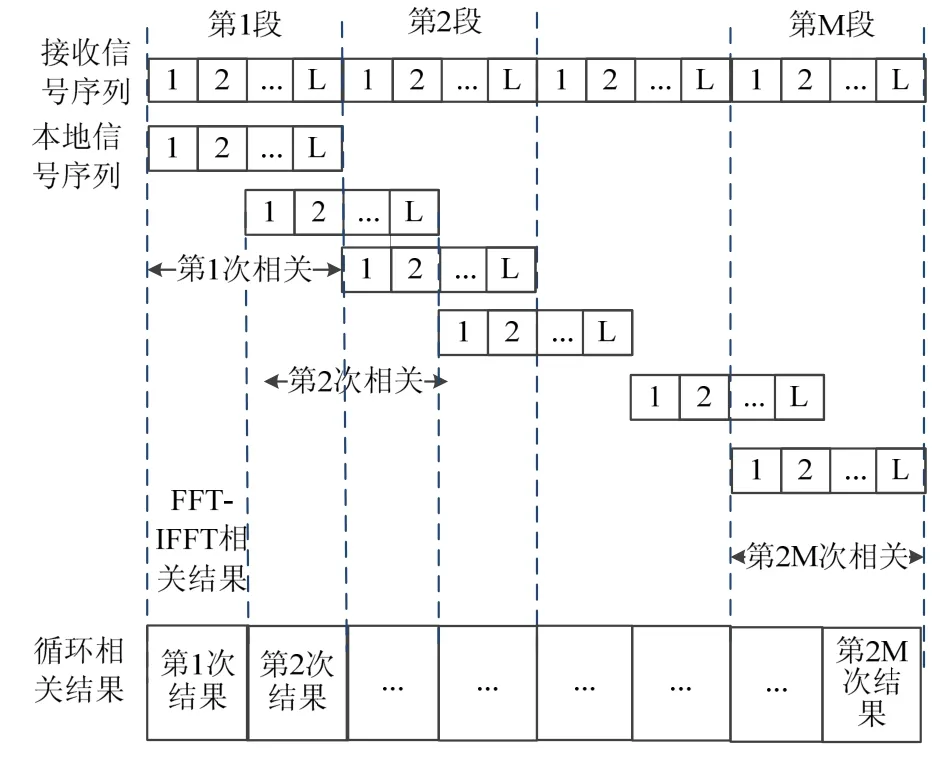
圖2 折疊段循環相關示意圖Fig.2 Folding section cycle related schematic diagram
將循環相關后的結果依次進行非相干運算,計算各段相關峰值大小,然后將其與門限進行大小比較,判定是否捕獲。折疊預處理及非相干運算可在一定程度上提高捕獲算法的靈敏度。
2.2 慣性信息輔助模型參數調整
傳統慣性輔助多采用速度信息或加速度信息中的一種對本地信號進行輔助。采用速度信息進行輔助只能得到當前粗略的本地載波頻率,不能保證高機動情況下的輔助有效性;采用加速度輔助可以得到多普勒頻率大致范圍,但無法保證輔助范圍的精確性。本文提出一種基于速度與加速度聯合輔助模型,其實現過程:
1)速度信息輔助
在P碼捕獲算法中,直接使用慣性速度信息來進行多普勒頻移量的估計,提供接收信號的頻率補償量的中心值 。
2)加速度信息輔助
慣性加速度信息加載至P碼直接模型中,調整搜索信號頻率偏移的變化范圍,將其進行左右搜索的偏移量固定在較小的范圍內。

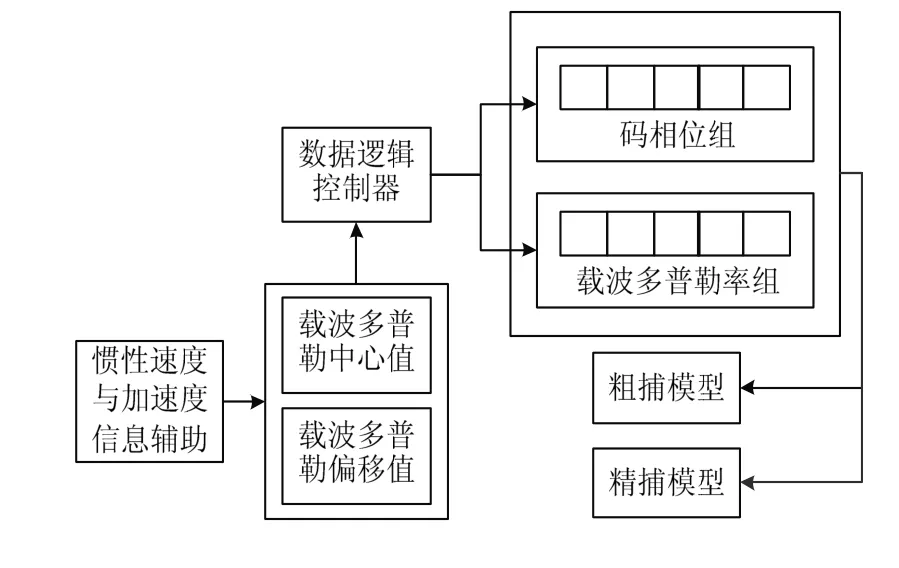
圖3 慣性輔助參數調整結構圖Fig.3 Acquisition structure with INS aided
2.3 慣性輔助的多段重合P碼直捕算法
基于慣性信息輔助的P碼直捕算法主要依靠慣性信息提供速度、加速度信息,從而計算出較為準確的多普勒頻率范圍,輔助本地載波多普勒的搜索。在此基礎上,利用多段重合折疊 P碼捕獲模型對碼相位進行粗捕獲快速定位碼相位范圍,進而通過精捕過程確定精確的碼相位值,完成多普勒頻率及碼相位的二維搜索。
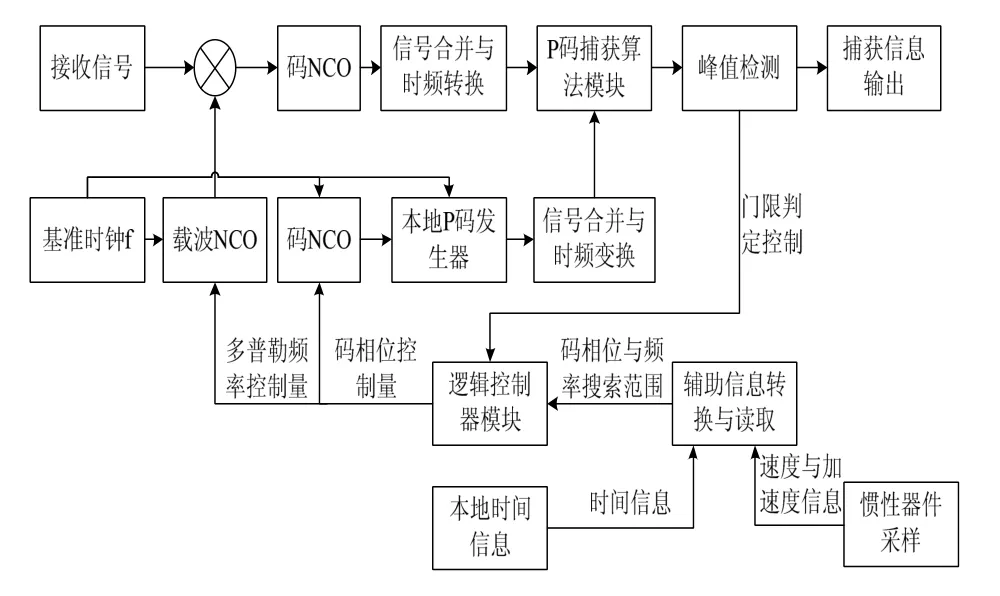
圖4 慣性信息輔助P碼直捕的結構框圖Fig.4 Structure of direct P code acquisition aided with INS
1)粗捕過程
在粗捕獲過程中,首先,將慣性傳感器測測當前載體的速度與加速度,通過慣性信息輔助模塊對信息進行計算與轉換,將載波中心頻率與頻率變化率參數加載至系統參數邏輯控制器中;其次,將邏輯控制器進行參數調整,產生對應的本地信號,同時對本地 P碼與接收P碼信號進行算法中設計的過程進行相互獨立的邏輯處理;最后,將兩路信號進行相關處理,并對相關峰值與門限峰值進行判斷,為精捕獲模型提供比較精確的碼相位與載波多普勒值。
2)精捕過程
在獲得粗捕過程提供的相應參數后,考慮載體加速度很大時,此時粗捕過程提供的載波中心頻率與信號實際的載波中心頻率相差較大;精捕過程先將粗捕獲多普勒頻率與慣性信息計算得多普勒頻率與其變化量進行對比,通過邏輯控制劃分較精確的頻率點對信號精確搜索。
3 仿真分析
為了測試與評估算法在有無慣性輔助條件下,對P碼的捕獲性能進行對比分析,本節主要對算法在有無慣性輔助條件下對相關峰值的檢測概率與捕獲時間進行分析。實驗采用文獻[14]設計的衛星信號仿真系統仿真相應衛星中頻信號,從而獲得任意動態情況下接收到的實際信號。
3.1 多段重合折疊P碼捕獲性能分析
算法中重合段數N與均值點數M可以根據需要進行修改,是影響算法處理速度與捕獲精度的主要因素,因此,在對仿真結果歸納的基礎上,分析選取N與M不同參數時,對算法捕獲性能帶來的影響。
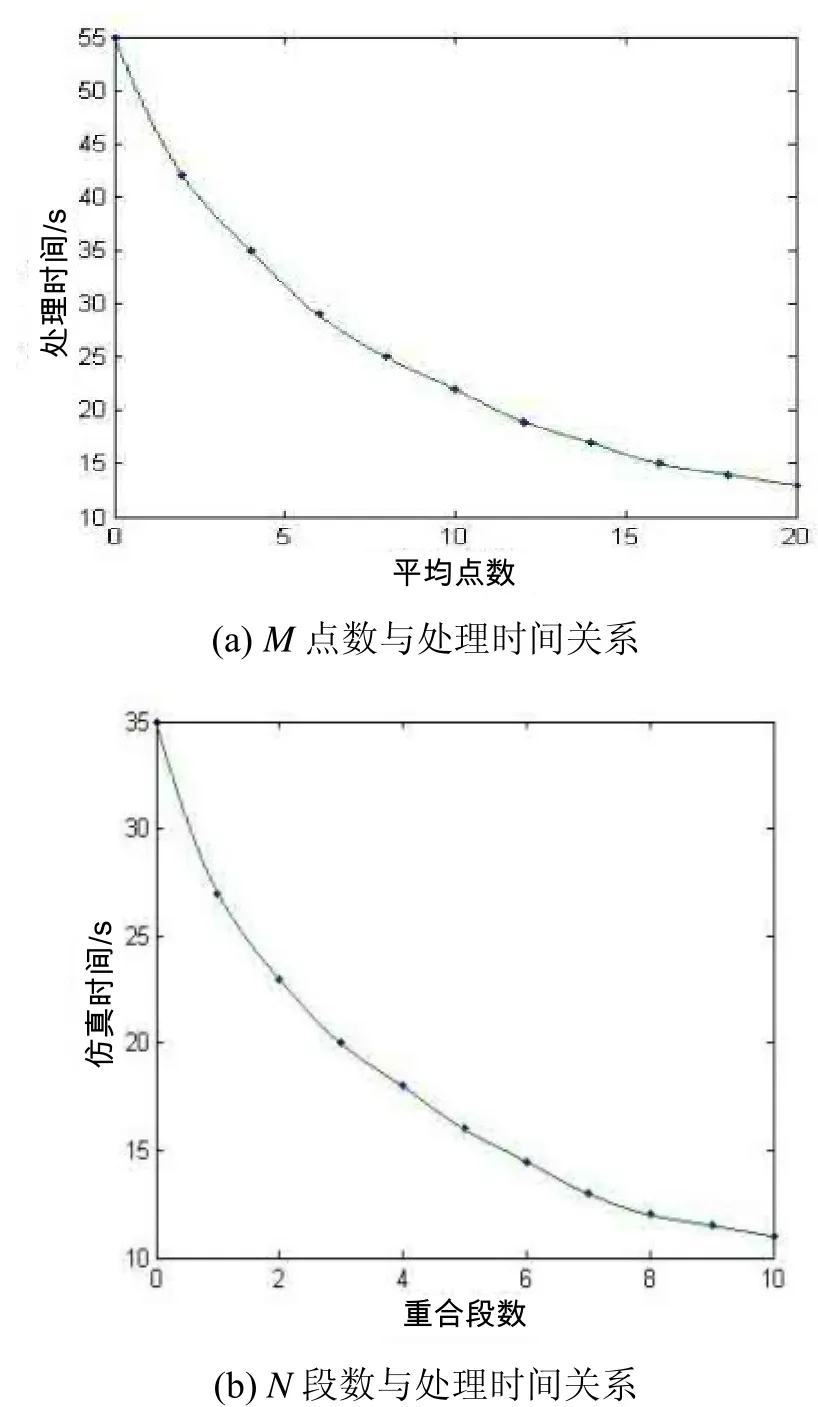
圖5 段數N、均值點M與仿真處理時間關系Fig.5 Processing time of different M and N
由圖5可發現,均值點數M越多,重合段數N越多,單個碼元包含的信息越多,對于非目標段的碼搜索時,相關次數較少處理效率較高,對于目標碼段會導致精捕過程中去模糊次數增多。
將均值法與 XFAST法參數設置與多段重合算法保持一致,選取不同載噪比的序列作為數據源,進行多次測試,可得檢測概率與平均捕獲時間結果。
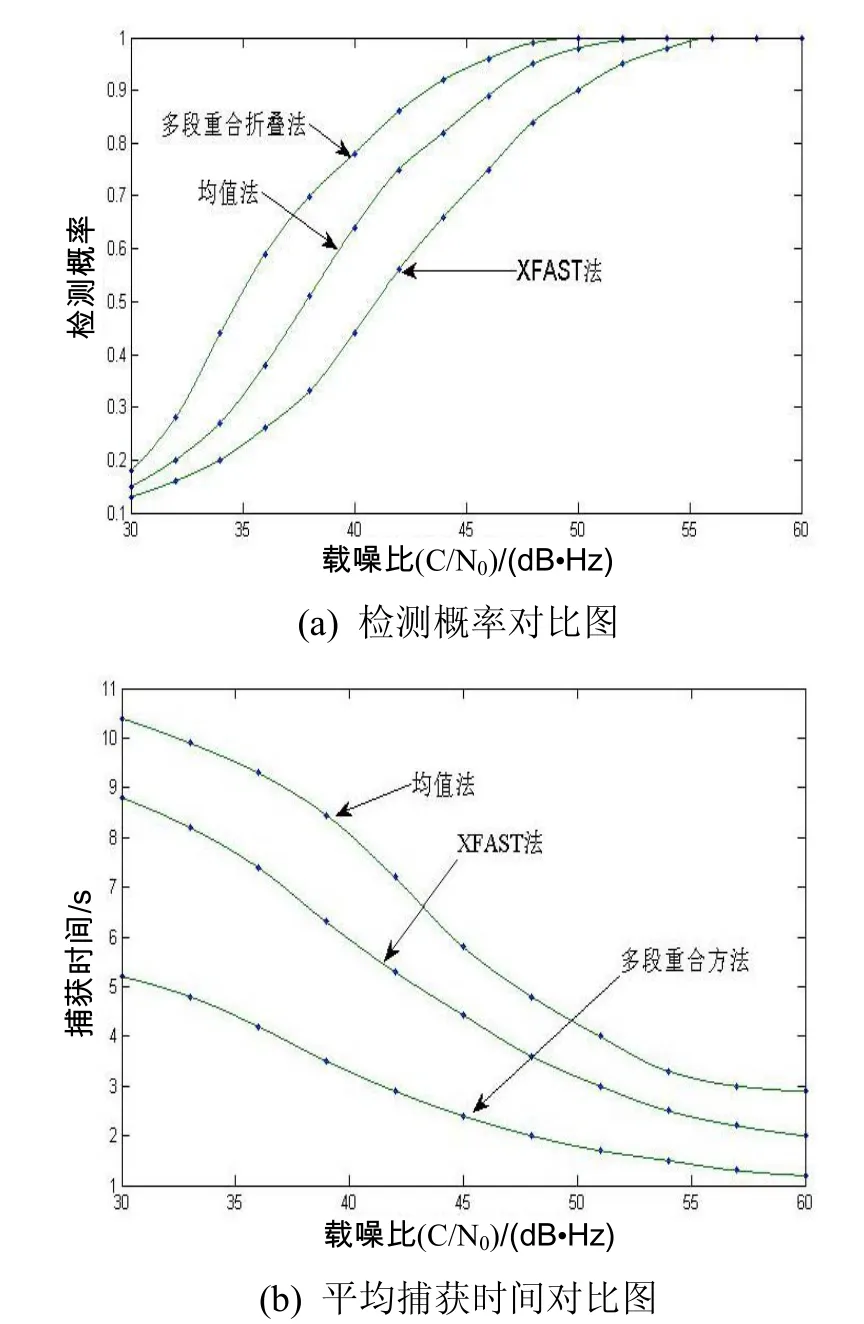
圖6 捕獲算法性能對比Fig.6 Performance comparison of different acquisition methods
對不同方法進行實驗,由圖6可知,當相位搜索的范圍增大時,多段重合折疊法在平均捕獲時間上較典型P碼直捕方法節省50%,能有效的提高捕獲效率;同時,載噪比較低的情況下,其檢測能力明顯強于典型方法;因此,在相位偏差較大與信噪比較低的情況下,捕獲性能較典型的方法優勢明顯。
3.2 慣性輔助多段重合折疊性能分析
動態情況下速度不斷發生變化,有無慣性信息輔助搜索的多普勒范圍有所差異,因此考慮計算量相當情況,無慣性輔助采用500 Hz為頻率搜索步長,有慣性輔助時采用50 Hz為頻率搜索步長。
利用衛星中頻信號仿真系統仿真衛星號分別為4、7、10、12、23、25、30、31共八顆衛星,分別仿真不同馬赫數航跡下對應的衛星中頻信號。取峰值/次峰值門限為 5,進行多次實驗可得出衛星速度與捕獲衛星數目之間的關系如圖7所示。可以看出在速度大于3 Mach時,慣性導航系統信息輔助作用較明顯,相較無慣性輔助情況可多捕獲至少2顆星。
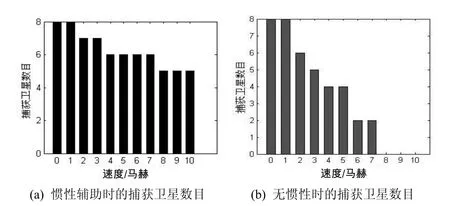
圖7 速度與捕獲衛星數目關系圖Fig.7 Acquisition satellite number for different speeds
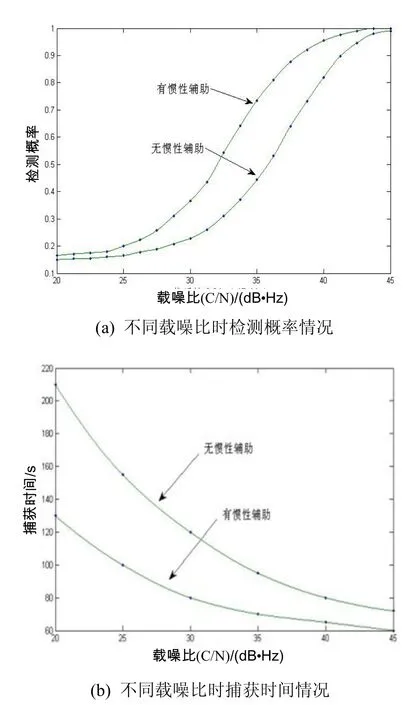
圖8 P碼的捕獲性能分析Fig.8 Performance of P code acquisition
(References):
[1] Zou Dejun, Deng Zhougliang, Huang Jianmin, Liu Huadong, Yang Lei. A study of neuman hoffman codes for GNSS application[C]// Proceedings of the 5th international conference on wireless communications, networking and mobile computing. Beijing China, 2009: 1832-1835.
[2] Kaplan E D. Understanding GPS: Principles and applications[M]. 2nd Ed. Artech House Publishers, 2006: 168-190.
[3] Heiries V, Avila-Rodrigues J A, Irsigler M, et al. Acquisition performance analysis of composite signals for the L1 OS optimized signal[C]//ION GNSS 18th ITM. 2005: 13-16.
[4] Jing Pang. Direct global positioning system P-code acquisition field programmable gate array prototyping[D]. College of Engineering and Technology of Ohio University, California, 2003: 30-35.
[5] Li H, Lu M, Feng Z. Mathematical modeling and performance analysis for average based rapid search method for direct GPS P-code acquisition[J]. IET Radar Sonar Navigation, 2009, 3(1): 81-92.
[6] 吳華兵,胡永輝,何在民. 基于匹配濾波器組與FFT的P碼直捕方法研究與實現[C]//第一屆中國衛星導航學術年會, 2010: 1-6
WU Hua-bing, HU Yong-hui, HE Zai-min, Research and implement of P code direct acquisition based on matched filter bank and FFT[C]//The 1th ChinaSatillite Navigation Conference. 2010: 1-6.
[7] Zhen Zhu, Frank van Graas, Janusz Starzyk. GPS signal acquisition using the repea- tability of successive code phase measurements[J]. GPS Solution, 2008, 12(1): 43-53.
[8] Betz J W, Fite J D, Capozza P T. DirAc: An integrated circuit for direct acquisition of the M-code signal[C]//ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach, CA, 2004.
[9] Jovancevic A, Brown A. Open architecture GPS receiver[C]//Proceedings of ION 57th Annual Meeting. Albuquerque, NM, 2001: 489-500.
[10] Heckroth K, Scherrer K, Nielson J. Fast Direct-Y GPS acquisitions with inaccurate time[C]//ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach, USA, 2004: 573-578.
[11] 苗劍峰. 抗差自適應 GPS 軟件接收機的關鍵技術研究[D]. 南京航空航天大學,2009.
MIAO Jian-feng. Research on Key Technologies for robust and adaptive GPS soft- ware receiver[D]. Nanjing University of Aeronautics and Astronautics, 2009.
[12] Brown A, Gerein N. Direct P(Y) code acquisition using an electro optic correlator[C]//ION National Technical Meeting, 2001.
[13] Jovancevic A, Ganguly S, Zigic S. Direct P(Y)/M-code acquisition[C]//ION GNSS 17th International Technical Meeting of the Satellite Division. Long Beach, CA , 2004: 561-572.
[14] 曹進,李榮冰,徐昭,等. GPS P碼接收機本地信號發生器的 FPGA實現[J]. 系統仿真技術,2013,9(1):104-108.
CAO JIN, LI Rong-bing, XU Zhao, et al. Implementation of local GPS P Code generation in GPS receiver based on FPGA[J]. System Simulation Technology, 2013, 9(1): 104-108.
[15] 曾慶喜,唐琳琳,王慶,陳小惠. GPS軟件接收機寬載噪比載波頻率精確捕獲策略[J]. 中國慣性技術學報,2013,21(4):500-505.
ZENG Qing-xi, TANG Lin-lin, WANG Qing, CHEN Xiao-hui. Acquisition of fine carrier frequency under wide carrier-to-noise ratio in GPS software receivers[J]. Journal of Chinese Inertial Technology, 2013, 21(4): 500-505.
INS-aided fast direct P-code acquisition method using multiple replica coincidence operation
LI Rong-bing, XU Zhao, CAO Jin, LIU Jian-ye
(Navigation Research Center, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China)
In order to solve the problem of low detection probability and low acquisition efficiency and meet the requirements of rapid high-precision positioning in complex environment, a multi-segment overlap folding P-code acquisition algorithm was designed, which can increase the amount of information contained in the same length of local code and improve the efficiency of code correlation processing as a result of the folding preprocessing of local code. An INS-aided fast direct P-Code acquisition method using multiple replica coincidence folding operation was proposed, which narrows the Doppler range with the navigation parameters from INS and adjust the local control parameters automatically, therefore it can realizes the P code fast acquisition in high dynamics and weak signal environments. Simulation results show that this method can effectively improve the acquisition efficiency of P code, i.e., the acquisition probability can be increased by 10% and the calculation time consuming can be reduced by 30% in environments with carrier-to-noise ratio of 30-40 dB·Hz.
P code; INS; direct acquisition; integrated navigation
李榮冰(1977—),男,博士,副教授,從事衛星導航與組合導航技術研究。Email:lrbing@nuaa.edu.cn
1005-6734(2014)04-0504-06
10.13695/j.cnki.12-1222/o3.2014.04.015
TN911.8
A
2014-02-06;
2014-07-14
國家自然科學基金(61273057,91016019);航空科學基金(20100852010)
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
中華手工(2017年2期)2017-06-06 23:00:31
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
中外會展(2014年4期)2014-11-27 07:46:46
環球時報(2010-02-11)2010-02-11 13:34:15
建筑創作(2001年3期)2001-08-22 18:48:14
祝您健康(1987年3期)1987-12-30 09:52:32