智能垃圾分揀系統的模擬與實現
2014-11-18 12:28:18黃倫,劉沛,譚濤
機電工程 2014年11期
黃 倫,劉 沛,譚 濤
(陜西理工學院 機械工程學院,陜西 漢中 723001)
0 引言
城市生活垃圾是當今世界不斷增長的資源,如果處理的好會帶來巨大的經濟效益,處理不好則對自然環境和人類的生活造成巨大的影響。我國一年生活垃圾產生總量達1.6 億噸,每年以8%~10%的速度增長[1],但生活垃圾一直是混合收集,如果直接處理不僅造成資源的極大浪費,而且混合垃圾中還含有一些危險廢物如日光燈管、廢舊電池等,極易造成嚴重污染[2-5]。在處理方式上,目前我國90%以上的垃圾采用直接填埋的方式,8% 直接堆肥或露天堆放,不到2%的垃圾被直接燃燒[6]。然而發達國家于20世紀70年代開始實施城市生活垃圾分類收集,該方法為垃圾的填埋、焚燒、堆肥等的正確處理打下基礎,為實現垃圾處理減量化、資源化、無害化目標創造條件。目前,歐美及日本等發達國家對垃圾在源頭上進行分類投放,根據不同垃圾種類規定所投放到不同顏色的垃圾桶,通過專門的垃圾回收車進行人工收集,之后運送到相應的處理場進行處理[9-13]。然而,采用人為的分類運輸,不但成本高,而且工序繁雜,需要消耗大量物力和財力,因此采用一套全自動化流水線的系統可大大節約成本,而且有利于環境保護和資源的再利用。
本研究采用自動化流水線的方式設計制造出一套系統模型,將人工分揀壓縮打包后的垃圾桶,通過帶有攝像頭識別的智能分揀小車(小車上帶有機械手臂)自動尋跡和辨別垃圾桶顏色,將不同的垃圾桶運送到相應的垃圾處理廠進行相應的分類處理。
1 系統總體結構
系統由軌跡引導線和智能垃圾桶分揀小車兩大部分構成。軌跡線是智能分揀小車尋跡的引導線,其分為紅、黑、藍3 種顏色,小車根據所抓取的垃圾桶的不同顏色尋找相應顏色的軌跡;智能分揀小車由攝像頭、機械爪、模擬垃圾桶、舵機、主電路平臺、直流電機和小車模型構成。
攝像頭對物體顏色進行識別,兩個舵機驅動機械爪抓取垃圾桶,根據垃圾桶的顏色使小車的舵機打向相應的路徑,從而模擬不同垃圾桶分別運輸到不同的垃圾處理中心。該系統總結構如圖1 所示。
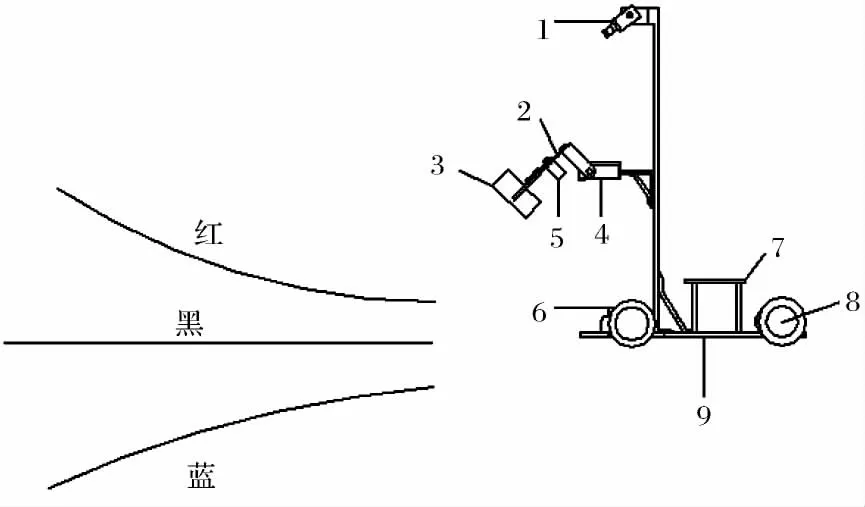
圖1 垃圾桶分揀系統總結構圖
2 硬件電路設計
2.1 主板電路
智能分揀小車的主板電路由MC9S12XS128 的16 bit 單片機和電源電路組成。其MC9S12XS128 集成了PIM、TIM、PWM、SPI、SCI、ECT、CAN、AD、PIT、CAN 等模塊[15],使用方便,功能強大,主要用來對攝像頭采集回來的數據進行讀寫,求得實際軌跡線位置信息,并根據一定的算法對舵機和電機進行控制。電源電路由一路兩片LM7805 所組成的穩壓電源,其給機械手以及機械臂的兩個舵機供電;一路由LM2940 組成的線性電源以及調理電路,給芯片以及攝像頭供電。分揀機器人的導向舵機以及電機的電源由電池直接供電。該主板電路如圖2 所示。

圖2 主板電路圖
2.2 OV7620 攝像頭
OV7620 是CMOS 黑白圖像傳感器。其支持連續和隔行兩種掃描方式,VGA 與QVGA 兩種圖像格式;最高像素為664×492,幀速率為30fp8;數據格式包括YUV、YCrCb、RGB 3 種,能夠滿足一般圖像采集系統的要求。OV7620 內部可編程功能寄存器的設置有上電模式和SCCB 編程模式。該系統采用SCCB 編程模式,連續掃描,16 位RGB 數據輸出。
2.3 電機驅動電路
本研究所選擇的驅動芯片是英飛凌公司的大電流半橋驅動芯片BTS7970,該芯片最大輸出電流為63 A,導通內阻為16 mΩ,具有邏輯電平輸入、電流診斷、斜率調節、死區時間產生和過溫、過壓、欠壓、過流及短路保護的功能。BTS7970 應用非常簡單,只需要向芯片第2 引腳輸入PWM 波就能控制。當系統中只需要單向控制時,只需要讓電機一端接地,另一端接BTS7970 第4 引腳。如果需要電機雙向旋轉控制,則需要另一片BTS7970 共同組成全橋。該系統電機驅動電路采用兩片BTS7970 共同組成全橋來控制電機的雙向旋轉。
3 系統軟件設計
系統的程序設計是在飛思卡爾MC9S12XS128 系列單片機開發軟件Code Warrior 5.0 的平臺上進行的。該軟件具有支持多種語言、開發環境界面統一、交叉平臺開發以及支持插件工具等特點。在整個程序設計中,將整個系統分為:攝像頭識別顏色與尋跡、機械手動作、電機驅動等動作。
系統進入運行狀態中時,首先對系統進行初始化,初始化后判斷攝像頭是否完成一場數據的采集,采集完數據后沿著黑線進行循跡。當系統檢測到停止線后,小車停下通過攝像頭進行顏色識別,如果沒有垃圾桶被傳送帶運輸到指定位置則停止等待,否則智能機器人識別顏色并夾住垃圾桶。倒車后沿黑線尋跡,當系統檢測到停止線后沿著相應垃圾桶的顏色引導線尋跡。當系統檢測到終止線后,放下垃圾桶,進行倒車。倒車后繼續尋這一顏色軌跡,當系統檢測到停止線后退出藍色,繼續尋黑線,如此循環下去。該程序流程圖如圖3 所示。
4 尋跡與顏色識別
4.1 顏色識別
智能分揀小車采用靜態分割方法識別顏色,不同的顏色所體現的灰度值有一定的范圍,但是有的顏色會有一定的重合,該次設計主要采用紅、藍、黑3 種顏色(嚴格說來還有白色),通過對灰度值進行分割,并且留有一定的裕度,防止顏色的重合,進而成功地識別出3 種不同的顏色。
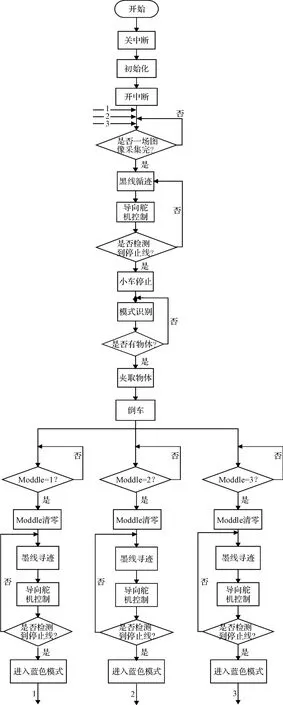
圖3 程序流程圖
紅、藍、黑3 種顏色的分割是基于灰度特征,因為該系統采用的是黑白數字攝像頭,攝像頭輸出給單片機的是一系列代表灰度值的電壓信號,單片機接受到這些信號通過D/A 轉換將其轉換為0~255 的數字信號,黑色和白色的灰度值是攝像頭灰度范圍(0~255)的兩個極端,黑色灰度值最小為0,白色灰度值最大為255,而攝像頭對物體顏色的識別主要通過對物體顏色的亮度(灰度值)來判斷的,不同的顏色具有一定的灰度值范圍,顏色識別就要在攝像頭的特定灰度值范圍內進行分割。該設計經過攝像頭的采集并通過串口發送到上位機進行顯示,通過串口程序的設定將攝像頭采集的灰度值和3 種顏色的閾值相比較,如果灰度值在藍色的灰度值范圍內,則程序設定發送0 的ASC 碼值,在上位機上顯示為0;如果灰度值在紅色的灰度值范圍內,則程序設定發送1 的ASC 碼值,在上位機上顯示為1;如果灰度值在白色的灰度值范圍內,則程序設定發送2 的ASC 碼值,在上位機上顯示為2;如果灰度值范圍在黑色的灰度值范圍內,則程序設定發送3的ASC 碼值,在上位機顯示為3;當一場數據采集完之后,則程序發送轉行符的ASC 碼值。所以本研究通過在該種設定情況下進行的上位機的顯示,從而分辨其顏色。對各種顏色進行對比實驗后,最終通過上位機的顯示確定了紅(131~180)、藍(90~130)、黑(0~80)3 種顏色的灰度值范圍相差較為明顯,而白色的灰度值范圍廣(180~255),容易和這3 種顏色分辨。所以本研究以白色為背景,通過對上位機的數據分析和對比,在攝像頭連續掃描的總行、列數中確定所需要掃描的基準行數和列數,從而將掃描的每個點的灰度值和閾值進行比較,判別出相應的顏色。
4.2 尋跡識別
所謂尋跡識別,就是把攝像頭所拍攝到圖像中反映引導線的部分提取出來。這是一個圖像分割的過程。圖像分割是計算機進行圖像處理與分析中的一個重要環節,是一種基本的計算機視覺技術。尋跡識別是通過攝像頭將圖像信息(如圖4 所示)采集到芯片中對某幾行從左到右進行連續的掃描,以尋紅線為例,將掃描到的灰度值和紅色閾值范圍進行比較,如果有連續的兩行點的灰度值進入紅色閾值范圍內,則標記出第一個進入紅色閾值范圍內的列數作為中心線特征值坐標。然后系統將得出的中心線特征值坐標和一場圖像的中間列坐標值進行偏差計算,來控制舵機,如此循環,進行下一次模式識別(紅、藍、黑模式)。采集完一場的圖像時,本研究采用雙峰法將每一行的閾值先計算出來。目標指引線是有寬度(2 cm)的,只是能探測到目標指引線,指引線的寬度信息對智能車定位系統并無額外的幫助。為達到尋線目的,實際上只要提取目標指引線的某些特征點,要求這些特征點合在一起能反映出指引線的形狀,稱這些特征點的矩陣坐標為特征位置。只要知道目標指引線的特征位置,本研究就可以進一步推知目標指引線的形狀和位置。提取目標指引線的矩陣坐標,就是只取一些能代表它的特征點,然后求取這些特征點的矩陣坐標。該系統采用動態雙峰法,以采集路線軌跡信息,使用攝像頭對將要尋的軌跡從右向左進行掃描,通過閾值的設定使智能機器分揀小車,按照不同的模式進行尋跡,增加了智能分揀小車的適應性,提高了抗干擾能力。系統通過將不同顏色的物體按照相應顏色的軌跡分別運輸,從而達到將不同種類的垃圾桶分送到相應的處理中心進行處理的模擬。但是實驗環境并不理想,由于受到光線斜射的影響,有時背景和前景的對比十分不明顯,需要結合實際情況進行修正。
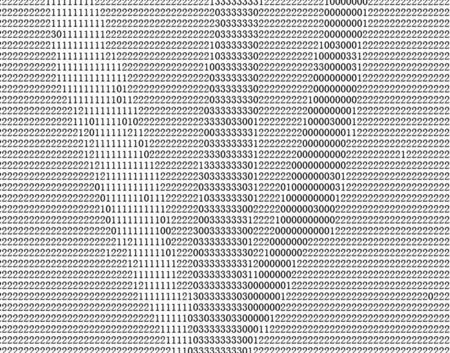
圖4 通過串口發送到上位機的顏色路線圖像
4.3 系統尋跡的穩定性分析
系統尋跡累積誤差分析如圖5 所示。在光線和攝像頭前瞻一定的情況下,占空比從左到右分別為15%、25%、35%、45%、55%和65%時,智能垃圾分揀小車運行20 圈統計的累積誤差為e,因為尋跡線寬為2 cm,智能垃圾小車的瞬時最大誤差不超過1 cm(線寬的50%),只有這樣才能保證小車尋跡的準確性和穩定性。為了便于觀察,本研究把累積誤差0線標定到縱坐標為4 cm 處,從圖5 可以觀察到隨著占空比(速度)的加大,系統的累積誤差和波動加大,但是累積誤差在最大的誤差范圍內,總體上系統的累積誤差趨于0;當占空比較小時,也就是智能小車的速度比較低時,小車的累積誤差波動較小,尋跡的能力比較準確、可靠。該方案以Freescale 公司的MC9S12XS128 單片機作為系統的控制核心,采用OV7620 數字攝像頭采集軌跡線信息,根據采集到的數據信息分析行駛路徑。本研究采用PID 算法和模式識別對智能分揀小車的舵機和直流電機進行控制,并根據引導線的彎曲程度和顏色采用不同的控制策略。經過實際測試,整個智能分揀小車系統能在規定的引導線上穩定地行駛。

圖5 系統尋跡累積誤差分析
5 結束語
本研究是采用飛思卡爾MC9S12XS128 系列單片機垃圾分揀系統的控制系統,尤其是設計了通過OV7620 的CMOS 黑白圖像傳感器的閾值分割來識別顏色和軌跡路線。該控制系統經過Code Warrior 5.0軟件開發平臺的程序在線調試,系統程序穩定可靠,運行良好。
經過對系統的研究、設計與開發,控制系統已實現運行。從實際的運行效果來看,系統滿足了垃圾分揀自動化流程的要求。該模擬系統的實現對工業應用提供了有利的參考,為工業實現提出了有利的理論依據。
6 致謝
該系統歷時5個多月的設計和制作,筆者充分認識到了從理論到實踐的重要性和科學性,在整個過程中,導師劉沛教授給予了很大的指導和幫助,讓很多難題都迎刃而解。同時感謝陜西理工學院電工實驗中心和電工電子實驗中心的老師們給予的支持和幫助。
[1]常 超,王鐵山.垃圾處理的國際比較與借鑒[J].城市問題,2009(1):77-81.
[2]張英明,尚曉波,李開明,等.城市生活垃圾處理技術現狀與管理對策[J].生態環境學報,2011,20(2):389-396.
[3]馬詩院,馬建華.我國城市生活垃圾分類收集現狀及對策[J].環境衛生工程,2007,15(1):12-14.
[4]廖如珺,黃建忠,楊丹蓉.中國城市生活垃圾分類處理現狀與對策[J].職業衛生與病傷,2012,27(1):30-34.
[5]JIANG Yuan,KANG Mu-yi,LIU Zheng,et al.Urban garbage disposal and management in China[J].Journal of Environmental Sciences,2003,15(4):531-540.
[6]趙東明.從循環經濟看居民的源頭垃圾分揀[J].商場現代化,2009(9):255.
[7]陳蘭芳,吳 剛,張 燕,等.垃圾分類回收行為研究現狀及其關鍵問題[J].生態經濟,2012(2):142-145.
[8]CALABRòP S,GREENHOUSE,GASES.Emission from municipal waste,management:the role of separate collection[J].Waste Management,2009,29(7):2178-2187.
[9]劉寧寧,簡曉斌.國內外城市生活垃圾收集與處理現狀分析[J].國土與自然資源研究,2008(4):67-68.
[10]周國梅,任 勇.德國的循環經濟:從垃圾經濟到可持續生產與消費體系[J].世界環境,2007(1):40-43.
[11]孫立明,周凱興.美國城市生活垃圾處理現狀及思考[J].工業安全與環保,2004,30(2):16-18.
[12]杜 翼.我國與發達國家垃圾處理的比較分析[J].技術與市場,2009,16(1):63-64.
[13]DAHLéN L,VUKICEVIC S,MEIJER J E,et al.Comparison of different collection systems for sorted household waste in sweden[J].Waste Management,2007,27(10):1298-1305.
[14]晏祖根,李 明,徐克非,等.高速機器人分揀系統機器視覺技術的研究[J].包裝與食品機械,2014(1):28-31.
[15]孫同景,陳貴友.Freescale 9S12 十六位單片機原理及嵌入式開發技術[M].北京:機械工業出版社,2008.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
表面工程與再制造(2019年6期)2019-08-24 06:40:04
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32