基于樣本修整和支持向量機(jī)算法的并網(wǎng)風(fēng)電機(jī)組運(yùn)行特性研究
2014-11-22 11:45:04王吉東韓星星劉德有
上海理工大學(xué)學(xué)報(bào) 2014年6期
關(guān)鍵詞:風(fēng)速
王吉東, 許 昌, 王 欣, 韓星星, 鄭 源, 劉德有
(河海大學(xué) 能源與電氣學(xué)院,南京 210098)
由于風(fēng)資源的不可預(yù)測(cè)性以及機(jī)械、電氣等多重因素的影響[1],風(fēng)電機(jī)組運(yùn)行工況復(fù)雜多變,系統(tǒng)具有明顯的非線性、隨機(jī)性和強(qiáng)耦合性,因此,很難建立精確的物理模型[2].在傳統(tǒng)的風(fēng)力機(jī)建模中,風(fēng)能計(jì)算通常采用文獻(xiàn)[3]中提供的風(fēng)能利用系數(shù)Cp的經(jīng)驗(yàn)公式,由于機(jī)組類型、參數(shù)等差異,該公式不能適用于不同機(jī)組,所以,采用經(jīng)驗(yàn)公式建立的控制理論缺乏實(shí)用價(jià)值.而以實(shí)際運(yùn)行數(shù)據(jù)為基礎(chǔ),通過(guò)現(xiàn)代智能算法探究風(fēng)電機(jī)組的實(shí)際運(yùn)行規(guī)律,為風(fēng)力發(fā)電系統(tǒng)建模與控制提供了新思路.
現(xiàn)代智能建模領(lǐng)域應(yīng)用最為廣泛的是人工神經(jīng)網(wǎng)絡(luò)算法,而神經(jīng)網(wǎng)絡(luò)模型中最常用的是BP(back propagation)神經(jīng)網(wǎng)絡(luò),該方法結(jié)構(gòu)簡(jiǎn)單、處理非線性問(wèn)題能力強(qiáng),但是,由于其基于經(jīng)驗(yàn)風(fēng)險(xiǎn)最小化原則(ERM),預(yù)測(cè)時(shí)常出現(xiàn)局部誤差過(guò)大的問(wèn)題,對(duì)于小樣本模型無(wú)法達(dá)到理想的預(yù)測(cè)精度[4].Vapnik在統(tǒng)計(jì)學(xué)習(xí)理論基礎(chǔ)上提出的支持向量機(jī)(SVM)是一類新型的機(jī)器學(xué)習(xí)算法,它基于結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則(SRM),克服了常規(guī)神經(jīng)網(wǎng)絡(luò)算法的缺陷,具有預(yù)測(cè)精度高、泛化能力強(qiáng)、能收斂于全局最優(yōu)等特點(diǎn)[5].文獻(xiàn)[6-7]針對(duì)不同類型的訓(xùn)練數(shù)據(jù),討論了SVM 核函數(shù)的選擇方法.文獻(xiàn)[8]討論了SVM中懲罰參數(shù)C 和預(yù)設(shè)誤差ε 對(duì)回歸函數(shù)的影響.文獻(xiàn)[9-11]分別介紹了利用雙線性搜索法、網(wǎng)格搜索法、雙線性網(wǎng)格搜索法、二分法及粒子群算法等對(duì)SVM 參數(shù)進(jìn)行優(yōu)化的方法.SVM 算法用于回歸估計(jì)時(shí)輸出為實(shí)函數(shù)集,多用在非線性函數(shù)逼近、時(shí)間序列預(yù)測(cè)、過(guò)程建模和控制領(lǐng)域[12-14].
本文從歷史運(yùn)行數(shù)據(jù)入手,針對(duì)風(fēng)電機(jī)組實(shí)際運(yùn)行特點(diǎn),對(duì)原始樣本進(jìn)行分類、剔除壞點(diǎn)、歸一化等處理,得到新的訓(xùn)練樣本,大大增強(qiáng)各個(gè)輸入變量和目標(biāo)值之間的相關(guān)性,克服了支持向量機(jī)在處理龐大雜亂數(shù)據(jù)時(shí)速度慢、預(yù)測(cè)精度低的缺點(diǎn)[15].通過(guò)對(duì)實(shí)際樣本訓(xùn)練分析,比較樣本修整前后和分別運(yùn)用SVM 算法與BP神經(jīng)網(wǎng)絡(luò)算法的訓(xùn)練結(jié)果,證明本文提出的方法能夠縮短訓(xùn)練時(shí)間、具有更高的訓(xùn)練精度和預(yù)測(cè)精度,是一種切實(shí)有效的風(fēng)電機(jī)組系統(tǒng)辨識(shí)方法.
1 樣本預(yù)處理方法
圖1是風(fēng)力機(jī)標(biāo)準(zhǔn)運(yùn)行曲線,據(jù)此可以看出,在運(yùn)行點(diǎn)B 并網(wǎng)以后,風(fēng)電機(jī)組運(yùn)行狀態(tài)可分成兩段:a.額定風(fēng)速以下的部分負(fù)荷區(qū),控制風(fēng)力機(jī)轉(zhuǎn)速變化,跟蹤最佳葉尖速比實(shí)現(xiàn)最大風(fēng)能捕獲;b.額定風(fēng)速以上的滿負(fù)荷區(qū),調(diào)節(jié)槳距角,限制風(fēng)力機(jī)轉(zhuǎn)速和氣動(dòng)功率捕獲,確保發(fā)電機(jī)組輸出功率穩(wěn)定在額定值.
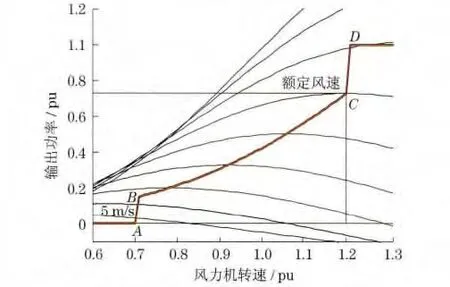
圖1 風(fēng)力機(jī)標(biāo)準(zhǔn)運(yùn)行特性曲線Fig.1 Standard operation characteristic curve of wind turbine
在圖1中,pu為標(biāo)幺值,風(fēng)力機(jī)轉(zhuǎn)速和輸出功率分別以發(fā)電機(jī)同步轉(zhuǎn)速和風(fēng)力機(jī)額定功率作為基準(zhǔn)值.
本文的研究目的是利用風(fēng)電場(chǎng)實(shí)測(cè)數(shù)據(jù),在低風(fēng)速時(shí),建立風(fēng)力機(jī)轉(zhuǎn)速給定值輸出模型;在高風(fēng)速時(shí),建立實(shí)際的槳距角給定值輸出模型.得到轉(zhuǎn)速控制和槳距角控制的給定值,為采用智能轉(zhuǎn)速控制器和槳距角控制器取代傳統(tǒng)PID 控制器提供理論支持.
對(duì)樣本進(jìn)行預(yù)處理:
a.提取樣本.根據(jù)實(shí)際運(yùn)行特性按工況提取所需樣本數(shù)據(jù),提取額定風(fēng)速以下的部分負(fù)荷區(qū)數(shù)據(jù)作為樣本I,提取額定風(fēng)速以上的滿負(fù)荷區(qū)數(shù)據(jù)作為樣本II.
b.剔除壞點(diǎn).訓(xùn)練樣本包括輸入和輸出樣本數(shù)據(jù),輸入樣本Xk=(xk1,xk2,…,xki,…,xkm),其中,主要變量設(shè)為M(本文中指風(fēng)速v);輸出樣本Th=(th1,th2,…,thj,…,thm),根據(jù)訓(xùn)練目標(biāo)不同,選定輸出的目標(biāo)變量T(輸出功率P、風(fēng)力機(jī)轉(zhuǎn)速ω 或槳距角β).
在樣本中存在一些不合理的數(shù)據(jù)點(diǎn),會(huì)嚴(yán)重影響訓(xùn)練和預(yù)測(cè)的精度,這些點(diǎn)大致分為兩類:第一類是由于設(shè)備檢測(cè)或數(shù)據(jù)記錄錯(cuò)誤等因素產(chǎn)生的與實(shí)際運(yùn)行規(guī)律相悖的數(shù)據(jù)點(diǎn);第二類是由于機(jī)組慣性或湍流風(fēng)速過(guò)大等原因引起的嚴(yán)重偏離最優(yōu)運(yùn)行曲線的數(shù)據(jù)點(diǎn).對(duì)兩種“壞點(diǎn)”進(jìn)行數(shù)學(xué)定義,對(duì)于樣本內(nèi)的第i個(gè)數(shù)據(jù)點(diǎn):
第一類

第二類

式中,δ為平整度,可自主設(shè)定.
以江蘇省某風(fēng)電場(chǎng)額定風(fēng)速以下的運(yùn)行數(shù)據(jù)為例,選擇風(fēng)速v 作為樣本主要屬性,輸出功率P 作為目標(biāo)變量,平整度δ=15%.按照式(1)和式(2)逐個(gè)剔除樣本中的“壞點(diǎn)”,圖2(a)和2(b)分別顯示了樣本處理前后的數(shù)據(jù)點(diǎn)分布情況,比較發(fā)現(xiàn),剔除壞點(diǎn)后樣本得到有效簡(jiǎn)化,數(shù)據(jù)間具有更強(qiáng)的相關(guān)性.

圖2 剔除壞點(diǎn)前后樣本數(shù)據(jù)比較Fig.2 Comparison of initial data and reduced data
c.數(shù)據(jù)歸一化處理.為了避免各指標(biāo)的數(shù)值之間相差過(guò)大影響學(xué)習(xí)訓(xùn)練的速度,對(duì)歷史數(shù)據(jù)進(jìn)行規(guī)一化處理,即將原始數(shù)據(jù)經(jīng)過(guò)線性變化至[0,1]區(qū)間中,構(gòu)成訓(xùn)練數(shù)據(jù)集[16].
2 支持向量機(jī)回歸算法
在支持向量機(jī)回歸方法中,分為線性回歸與非線性回歸.對(duì)于線性回歸問(wèn)題,根據(jù)給定的訓(xùn)練集樣本{(x1,y1),(x2,y2),…,(xl,yl)},xi∈?n,yi∈?,i=1,2,…,l.xi為輸入量,yi為對(duì)應(yīng)的輸出量,尋求一個(gè)反映樣本數(shù)據(jù)輸出和輸入的最優(yōu)函數(shù)關(guān)系f(x),并且對(duì)于預(yù)測(cè)集樣本的輸入量{xl+1,xl+2,…,xm},能夠由該函數(shù)得出較為準(zhǔn)確的預(yù)測(cè)值{yl+1,yl+2,…,ym}.
函數(shù)“最優(yōu)”是指按照某一確定的誤差函數(shù)來(lái)計(jì)算,所得的函數(shù)關(guān)系對(duì)樣本數(shù)據(jù)集擬合的累計(jì)誤差最小,SVM 算法用于回歸估計(jì)采用ε-intensive損失函數(shù)作為誤差函數(shù),形式為

訓(xùn)練學(xué)習(xí)的過(guò)程是構(gòu)造最優(yōu)的線性擬合函數(shù)f(x)=wx+b,其中,w∈?n,b∈?.根據(jù)結(jié)構(gòu)風(fēng)險(xiǎn)最小化原理,將訓(xùn)練過(guò)程進(jìn)行轉(zhuǎn)化,通過(guò)最小化目標(biāo)函數(shù)來(lái)訓(xùn)練w 和b[17].
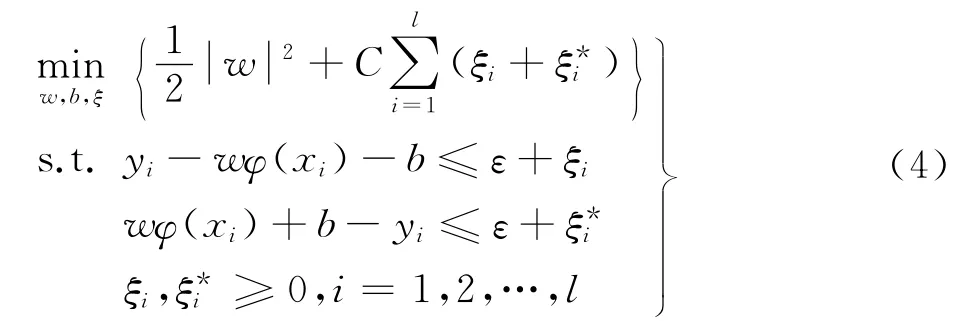
式(4)中第一項(xiàng)使擬合函數(shù)更為平坦,以提高泛化能力;第二項(xiàng)為減小誤差;懲罰參數(shù)C>0,表示對(duì)超出預(yù)設(shè)誤差ε的樣本的懲罰程度,這是一個(gè)對(duì)偶二次凸規(guī)劃問(wèn)題,引入Lagrange函數(shù),將式(4)的對(duì)偶最優(yōu)化問(wèn)題轉(zhuǎn)化為最大化目標(biāo)函數(shù)

約束條件為


參數(shù)b的求解,對(duì)于滿足0<αi<C條件的標(biāo)準(zhǔn)支持向量,有

式中,SV 表示標(biāo)準(zhǔn)支持向量的集合,包含所有在間隔區(qū)邊緣的訓(xùn)練樣本點(diǎn).

通過(guò)式(8)和式(9)對(duì)所有標(biāo)準(zhǔn)支持向量分別計(jì)算b的值,然后求平均值,即
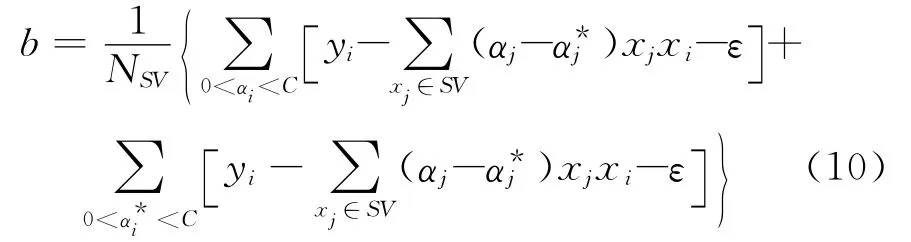
式中,NSV表示標(biāo)準(zhǔn)支持向量的個(gè)數(shù).
最終求得的線性擬合函數(shù)為

對(duì)于非線性回歸問(wèn)題,首先通過(guò)一個(gè)非線性映射Φ(x)將樣本數(shù)據(jù)映射到某個(gè)高維特征空間中,在高維特征空間中進(jìn)行線性回歸,這樣將原空間中的非線性回歸問(wèn)題轉(zhuǎn)化為高維特征空間中的線性回歸問(wèn)題.為了從原始空間中抽取特征,將原始空間中的樣本映射為高維特征空間中的一個(gè)向量,引入的映射函數(shù)K(xi,xj),稱為核函數(shù)[18],核函數(shù)是連接低維與高維之間的橋梁.
常用的核函數(shù)有多項(xiàng)式核、S型核、RBF(radial basis function)核 等[19].本 文 選 擇Gaussian 型RBF[20-21]作為SVM的核函數(shù),其形式為K(x,x′)=exp(-‖x-x′‖/2σ2),其中,x′ 為核函數(shù)中心,σ為函數(shù)的寬度參數(shù),控制了函數(shù)的徑向作用范圍,通過(guò)徑向基函數(shù)實(shí)現(xiàn)了用一元函數(shù)表示多元函數(shù)的目的.
于是,式(5)轉(zhuǎn)化為
約束條件與線性問(wèn)題相同,這樣就得到非線性擬合函數(shù)的表達(dá)式為

3 樣本訓(xùn)練結(jié)果
以江蘇省某風(fēng)電場(chǎng)2013年1月的10min運(yùn)行間隔數(shù)據(jù)作為初始樣本,選定機(jī)組的額定風(fēng)速為11m/s,按工況條件提取樣本I和II,剔除樣本I,II中的壞點(diǎn),再進(jìn)行歸一化處理.用SVM、BP 神經(jīng)網(wǎng)絡(luò)分別對(duì)預(yù)處理(DPP)后的樣本和處理前的樣本進(jìn)行訓(xùn)練,選取均方根誤差(RMSE)和平均相對(duì)誤差(MRE)作為訓(xùn)練和預(yù)測(cè)效果的主要判別依據(jù).
均方根誤差

平均相對(duì)誤差

式中,Y(i)和F(i)分別為實(shí)際值和預(yù)測(cè)值.
選定風(fēng)速作為輸入變量,即X=v,輸出功率作為輸出變量Y=P,對(duì)樣本I進(jìn)行預(yù)處理后樣本點(diǎn)從3 608個(gè)縮減到了1 831個(gè).由于支持向量的數(shù)目隨著預(yù)設(shè)誤差ε的增大而減小,根據(jù)訓(xùn)練過(guò)程,取ε=0.001,此時(shí)支持向量數(shù)目較少,數(shù)據(jù)點(diǎn)的逼近精度較高.選用雙線性網(wǎng)格搜索法,對(duì)SVM 參數(shù)σ2和C進(jìn)行優(yōu)選,得到最優(yōu)參數(shù)σ2=0.328 2,C=1 028.BP神經(jīng)網(wǎng)絡(luò)采用標(biāo)準(zhǔn)的3層網(wǎng)絡(luò)模式,SVM 和BP神經(jīng)網(wǎng)絡(luò)的輸入層節(jié)點(diǎn)數(shù)均為3,輸出層節(jié)點(diǎn)數(shù)為1,訓(xùn)練得到額定風(fēng)速以下P-v運(yùn)行曲線,結(jié)果如圖3和圖4所示(見(jiàn)下頁(yè)).

圖3 BP神經(jīng)網(wǎng)絡(luò)算法下P-v 曲線預(yù)測(cè)結(jié)果Fig.3 P-v prediction curves by BP neural network algorithm
圖3和圖4分別為使用BP網(wǎng)絡(luò)和SVM 算法對(duì)處理前和處理后的樣本進(jìn)行訓(xùn)練,并將得到的預(yù)測(cè)曲線與標(biāo)準(zhǔn)風(fēng)功率曲線進(jìn)行對(duì)比,進(jìn)一步計(jì)算得到表1中的預(yù)測(cè)誤差.比較圖3中的BP和DPP-BP曲線以及圖4中的SVM 和DPP-SVM 曲線可以看出,數(shù)據(jù)預(yù)處理后的樣本訓(xùn)練得到的曲線比處理前貼合得更好;比較圖3、圖4和表1可以看出,與BP神經(jīng)網(wǎng)絡(luò)算法相比,運(yùn)用SVM 算法的訓(xùn)練結(jié)果更加靠近標(biāo)準(zhǔn)風(fēng)功率曲線,訓(xùn)練誤差更小并且訓(xùn)練時(shí)間更短.
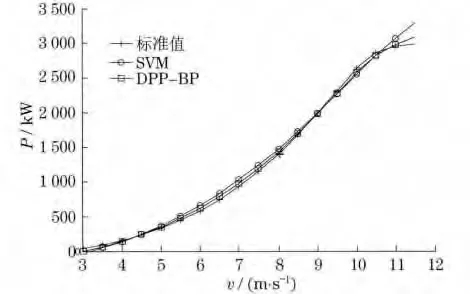
圖4 SVM 算法下P-v 曲線預(yù)測(cè)結(jié)果Fig.4 P-v prediction curves by SVM algorithm
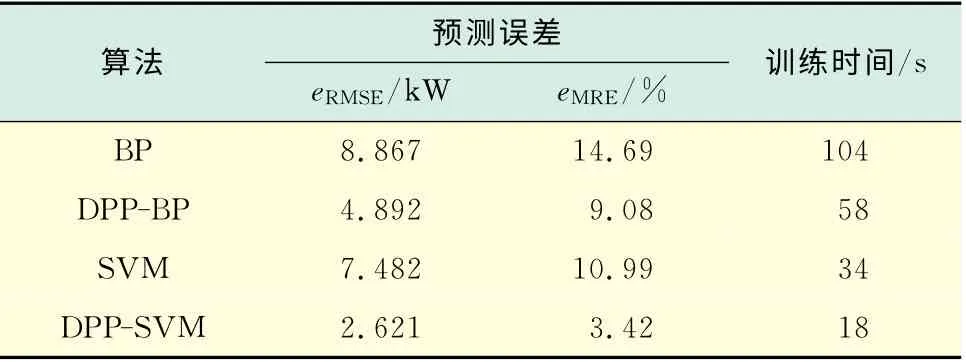
表1 P-v 曲線在不同算法下的預(yù)測(cè)誤差和訓(xùn)練時(shí)間Tab.1 Prediction error and training time of P-v curves by different algorithms
應(yīng)用上述方法,分別通過(guò)樣本I和II訓(xùn)練得到轉(zhuǎn)速-風(fēng)速(ω-v)曲線和槳距角-風(fēng)速(β-v)曲線,剔除壞點(diǎn)后樣本I(ω-v)數(shù)據(jù)點(diǎn)從3 573縮減到1 424個(gè),樣本II(β-v)數(shù)據(jù)點(diǎn)從2 108縮減到971個(gè),訓(xùn)練結(jié)果如圖5和圖6所示.
由于ω-v,β-v 標(biāo)準(zhǔn)曲線無(wú)法獲得,選擇訓(xùn)練誤差作為準(zhǔn)確性的判別依據(jù),表2和表3分別是訓(xùn)練ω-v和β-v曲線得到的訓(xùn)練誤差和訓(xùn)練時(shí)間.

圖5 不同算法下ω-v 曲線預(yù)測(cè)結(jié)果Fig.5 ω-v prediction curves by different algorithms

圖6 不同算法下β-v 曲線預(yù)測(cè)結(jié)果Fig.6 β-v prediction curves by different algorithms
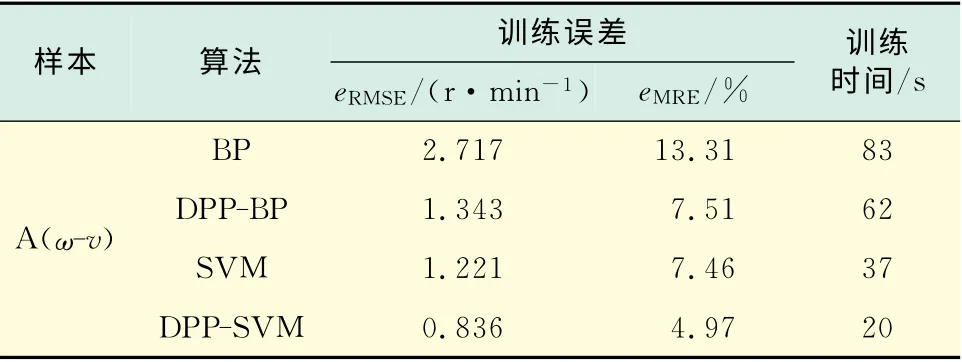
表2 ω-v 曲線在不同算法下的訓(xùn)練誤差和訓(xùn)練時(shí)間Tab.2 Training error and training time ofω-v curve by different algorithms

表3 β-v 曲線在不同算法下的訓(xùn)練誤差和訓(xùn)練時(shí)間Tab.3 Training error and training time ofβ-v curve by different algorithms
比較圖3和圖4可知,訓(xùn)練得到的P-v 曲線與圖1的標(biāo)準(zhǔn)運(yùn)行曲線BC 段的走勢(shì)基本一致;在圖5中,ω-v曲線的風(fēng)速v 在5~8m/s變化時(shí),轉(zhuǎn)速和風(fēng)速基本符合一次函數(shù)關(guān)系,說(shuō)明在這一工況區(qū)間機(jī)組是嚴(yán)格按照恒葉尖速比規(guī)律運(yùn)行的;在圖6中,β-v曲線的風(fēng)速未超過(guò)額定風(fēng)速時(shí)已經(jīng)開始進(jìn)行變槳操作,風(fēng)速較低時(shí)槳距角變化較慢,隨著風(fēng)速增大,變槳幅度呈現(xiàn)先增大后減小的趨勢(shì).進(jìn)一步比較表1、表2和表3中的誤差和訓(xùn)練時(shí)間,由于計(jì)算訓(xùn)練誤差時(shí)用到的樣本點(diǎn)遠(yuǎn)遠(yuǎn)多于計(jì)算預(yù)測(cè)誤差用到的樣本點(diǎn),因此,訓(xùn)練誤差普遍大于預(yù)測(cè)誤差.比較可得本文提出的基于數(shù)據(jù)預(yù)處理的支持向量機(jī)算法的預(yù)測(cè)精度和訓(xùn)練精度最好,訓(xùn)練速度最快,并且沒(méi)有出現(xiàn)BP 神經(jīng)網(wǎng)絡(luò)中局部誤差過(guò)大的問(wèn)題,具有明顯的優(yōu)越性.
4 結(jié) 論
充分考慮了并網(wǎng)風(fēng)電機(jī)組的運(yùn)行特性,對(duì)實(shí)測(cè)大樣本進(jìn)行數(shù)據(jù)預(yù)處理,分別使用SVM 和BP神經(jīng)網(wǎng)絡(luò)方法對(duì)修整后的樣本進(jìn)行訓(xùn)練.結(jié)果表明,在非線性曲線擬合方面,基于結(jié)構(gòu)風(fēng)險(xiǎn)最小化原則的SVM 算法致力于尋找全局最優(yōu)解,而基于經(jīng)驗(yàn)風(fēng)險(xiǎn)最小化原則的BP神經(jīng)網(wǎng)絡(luò)算法容易出現(xiàn)局部誤差過(guò)大問(wèn)題.本文提出的基于樣本預(yù)處理方法和SVM算法的非線性擬合方法在預(yù)測(cè)精度和訓(xùn)練速度上都存在明顯優(yōu)勢(shì).由于本方法原理簡(jiǎn)單,易于實(shí)現(xiàn),在風(fēng)電機(jī)組運(yùn)行特性研究領(lǐng)域具有很強(qiáng)的實(shí)用性.
[1]李辰奇,許昌,楊建川,等.基于CFD 的復(fù)雜地形風(fēng)能分布研究[J].上海理工大學(xué)學(xué)報(bào),2013,35(3):270-274.
[2]Hippert H S,Pedreirea C E,Souza R C.Neural networks for short-term load forecasting:A review and evaluation[J].IEEE Trans,Power Systems,2001,16(1):44-54.
[3]Hand M M.Variable-speed wind turbine controller systematic design methodology:a comparison of nonlinear and linear model-based designs[R].Colorado:National Renewable Energy Laboratory,1999.
[4]Vapnik V N.Statistical learning theory[M].New York:Wiley,1998.
[5]李盼池,許少華.支持向量機(jī)在模式識(shí)別中的核函數(shù)特性分析[J].計(jì)算機(jī)工程與設(shè)計(jì),2005,26(2):302-304.
[6]周洪利,劉培玉.支持向量機(jī)中的模型選擇研究[J].信息技術(shù)與信息化,2006(6):61-63.
[7]王鵬,朱小燕.基于RBF 核的SVM 的模型選擇及其應(yīng)用[J].計(jì)算機(jī)工程與應(yīng)用,2003,39(24):72-73.
[8]劉東輝,卞建鵬,付平,等.支持向量機(jī)最優(yōu)參數(shù)選擇的研究[J].河北科技大學(xué)學(xué)報(bào),2009,30(1):58-61.
[9]趙璐華,彭濤.一種有效的SVM 參數(shù)優(yōu)化選擇方法[J].制造業(yè)自動(dòng)化,2010,32(9):146-149.
[10]徐海龍,王曉丹,廖勇,等.一種基于PSO 的RBFSVM 模型優(yōu)化新方法[J].控制與決策,2010,25(3):367-370.
[11]賀媛媛.基于支持向量機(jī)的電力系統(tǒng)短期負(fù)荷預(yù)測(cè)模型研究[D].大連:大連理工大學(xué),2005.
[12]牛東曉,谷志紅,刑棉,等.基于數(shù)據(jù)挖掘的SVM 短期負(fù)荷預(yù)測(cè)方法研究[J].中國(guó)電機(jī)工程學(xué)報(bào),2006,26(18):6-12.
[13]徐勤蘭,樊重俊,張鵬.灰色支持向量機(jī)在機(jī)場(chǎng)吞吐量預(yù)測(cè)中的應(yīng)用[J].上海理工大學(xué)學(xué)報(bào),2012,34(4):347-350.
[14]靳忠偉,陳康民,閆偉,等.基于支持向量機(jī)的中長(zhǎng)期電力負(fù)荷預(yù)測(cè)研究與應(yīng)用[J].上海理工大學(xué)學(xué)報(bào),2008,30(2):129-132.
[15]崔瑜琦.基于最小二乘支持向量機(jī)風(fēng)電機(jī)組的預(yù)測(cè)研究[D].北京:華北電力大學(xué),2010.
[16]Gunn S R.Support vector machines for classification and regression [R].Southampton:Unicersity of Southampton,1998.
[17]Atthajariyakul S,Leephakpreeda T.Neural computing thermal comfort index for HVAC systems[J].Energy Conversion and Management,2005,46(15/16):2553-2565.
[18]謝宏,魏江平,劉鶴立.短期負(fù)荷預(yù)測(cè)中支持向量機(jī)模型的參數(shù)選取和優(yōu)化方法[J].中國(guó)電機(jī)工程學(xué)報(bào),2006,26(22):17-22.
[19]Wendland H.Piecewise polynomial,positive definite and compactly supported radial basis functions of minimal degree[J].Adv Comput Math,1995,4(1):389-396.
[20]Wu Z M.Generalized Bochner’s Theorem for radial function[J].Approximation Theory and its Applications,1997,13(3):47-57.
[21]Lu Y W,Sundararajan N,Saratchandran P.Performance evaluation of a sequential minimal radial basis function(RBF)neural network learning algorithm[J].IEEE Trans,Neural Networks,1998,9(2):308-318.
猜你喜歡
氣象與環(huán)境科學(xué)(2021年4期)2021-08-27 02:26:12
電機(jī)與控制應(yīng)用(2021年12期)2021-02-28 07:55:52
海洋通報(bào)(2020年5期)2021-01-14 09:26:54
中國(guó)電業(yè)與能源(2020年5期)2020-06-16 02:20:00
陜西氣象(2020年2期)2020-06-08 00:54:38
西南交通大學(xué)學(xué)報(bào)(2016年4期)2016-06-15 20:29:37
風(fēng)能(2016年11期)2016-03-04 05:24:00
電測(cè)與儀表(2015年8期)2015-04-09 11:50:06
電機(jī)與控制應(yīng)用(2015年7期)2015-03-01 03:50:15
電網(wǎng)與清潔能源(2015年3期)2015-02-28 16:03:31