行走式臂架型回轉(zhuǎn)起重機回轉(zhuǎn)時起重能力變化規(guī)律的研究
2014-12-25 08:30:14任冬青
機械工程師
2014年12期
關(guān)鍵詞:能力
任冬青
(齊齊哈爾軌道交通裝備有限責(zé)任公司 大連研發(fā)中心,遼寧 大連116052)
0 引言
行走式臂架型回轉(zhuǎn)起重機種類繁多,有汽車起重機、輪胎起重機、履帶起重機、門座起重機、鐵路起重機等,在礦山、電力、港口、鋼鐵、化工、鐵路救援等各行業(yè)使用廣泛,在國民經(jīng)濟建設(shè)中發(fā)揮著重要作用。本文主要分析行走式臂架型回轉(zhuǎn)起重機在下車固定、上車幅度和臂長一定,做回轉(zhuǎn)動作時,起重機吊重能力的變化規(guī)律。
1 臂架型回轉(zhuǎn)起重機計算工況及數(shù)學(xué)模型建立、分析
1.1 兩個模型
假定行走式臂架型回轉(zhuǎn)起重機在堅實、水平支承面上,下車固定,打支腿或不打支腿時都有矩形傾覆線,上車吊臂幅度和臂長一定,圍繞回轉(zhuǎn)中心做360°回轉(zhuǎn)。上車重力為G1,重心落在起重機橫向平面上,距離起重機回轉(zhuǎn)中心距離為c;下車重力為G2,重心在回轉(zhuǎn)中心線上;吊臂工作幅度為R,吊重物為P,模型如圖1。
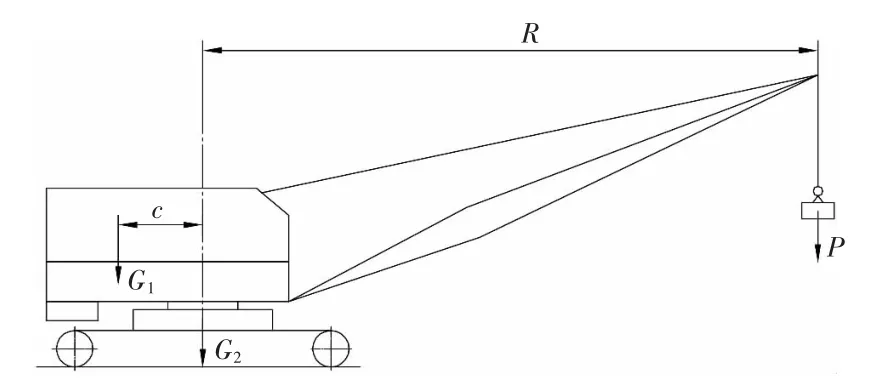
圖1 模型
起重機矩形傾覆線長為2a,寬為2b。由于起重機下車相對橫向平面和縱向平面對稱,所以可以只分析起重機上車在[0,π/2]回轉(zhuǎn)角度內(nèi)的吊重能力,[0,2π]角度內(nèi)吊重能力可由起重機在[0,π/2]內(nèi)的吊重能力關(guān)于橫向與縱向平面對稱得出。假定上車回轉(zhuǎn)角度為φ,模型如圖2。
圍繞AC傾覆線列力矩平衡方程:
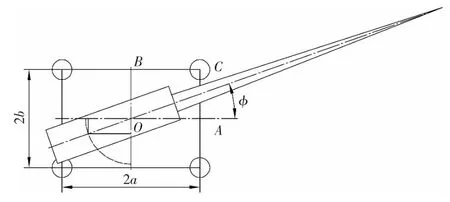
圖2 模型
P·(R·cosφ-a)=G1·(c·cosφ+a)+G2·a,0≤φ≤arccos(a/R)。圍繞BC傾覆線列力矩平衡方程:
P·(R·sinφ-b)=G1·(c·sinφ+b)+G2·b,arcsin(b/R)≤φ≤π/2。
1.2 起重機圍繞AC傾覆線的起重能力分析
1.3 起重機圍繞BC傾覆線的起重能力分析
arcsin(b/R)<φ≤π/2 時,P(φ)=[G1·(c·sinφ+b)+G2·b]/(R·sinφ-b),,P(φ)在 arcsin(b/R)<φ≤π/2 范圍內(nèi)單調(diào)減。,為最小值;φ→arcsin(b/R)時,P(φ)為無窮大。
1.4 起重機AC、BC傾覆線不傾覆的吊重能力
令 α=arcsin(b/R),β=arccos(b/R),α和β角位置如圖3所示。
如圖3可知,0<α<β<π/2。起重機對AC及BC傾覆線不傾覆的吊重能力P(φ)曲線如圖4。
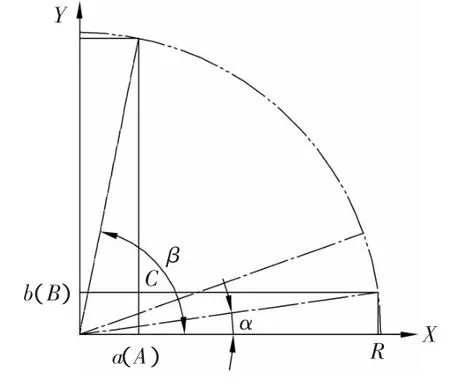
圖3
1.5 起重能力最大位置
起重機吊重能力需同時滿足圍繞AC和BC傾覆線不傾翻,所以起重機在[0,π/2]角度回轉(zhuǎn),吊重能力如圖4陰影部分。……
登錄APP查看全文
猜你喜歡
發(fā)明與創(chuàng)新(2022年30期)2022-10-03 08:40:56
意林(兒童繪本)(2020年2期)2021-01-07 02:12:04
動漫星空(興趣百科)(2020年12期)2020-12-12 05:31:40
意林(兒童繪本)(2019年9期)2019-10-15 08:51:46
中國生殖健康(2019年10期)2019-01-07 01:21:14
人大建設(shè)(2018年6期)2018-08-16 07:23:10
新高考(英語進(jìn)階)(2018年1期)2018-04-18 14:00:11
文理導(dǎo)航·科普童話(2017年5期)2018-02-10 19:42:14
無人機(2017年10期)2017-07-06 03:04:36
