基于IWOABC的垂直陣風(fēng)減緩控制律設(shè)計
2014-12-25 09:20:04朱江樂邱岳恒章衛(wèi)國趙鵬軒
飛行力學(xué) 2014年1期
關(guān)鍵詞:飛機
朱江樂,邱岳恒,章衛(wèi)國,趙鵬軒
(1.西北工業(yè)大學(xué)自動化學(xué)院,陜西西安710072;2.西安飛機設(shè)計研究所飛控液壓所,陜西西安710089)
0 引言
在大氣中,經(jīng)常有各個方向的氣流,由于大型客機的機翼載荷較小,在這種不平靜空氣中飛行時將會產(chǎn)生較大的過載,不僅會降低乘坐舒適性,嚴(yán)重時甚至?xí)斐蓚κ鹿剩?]。其中,垂直方向陣風(fēng)引起的過載對客機的影響最大,當(dāng)飛機在平靜大氣中保持平飛狀態(tài),遇到上升氣流擾動時,其大小和方向均會改變[2]。由此可見,由于大氣擾動的影響,將使機翼所承受的附加過載與垂直陣風(fēng)速度成正比。為了減小大氣擾動對飛機結(jié)構(gòu)強度的影響,減輕飛機的重量,有必要采取措施減少大氣擾動所引起的法向過載,從而達(dá)到減輕飛機結(jié)構(gòu)重量的目的。
陣風(fēng)減緩系統(tǒng)有時也被稱為載荷減緩系統(tǒng)[3]。陣風(fēng)減緩控制根據(jù)使過載增量最小化來衡量控制效果,其中控制參數(shù)的設(shè)計對陣風(fēng)減緩的優(yōu)劣有較大影響。采用經(jīng)典方法設(shè)計控制參數(shù)時,為了便于分析,往往會簡化掉一些因素,如飽和、延遲等,最終得到的參數(shù)對系統(tǒng)而言未必是可靠的。如果采用優(yōu)化方法,則可以較方便地將因素轉(zhuǎn)化為尋優(yōu)中的約束條件,使約束下達(dá)到設(shè)定精度的尋優(yōu)結(jié)果更為可靠。
在各種優(yōu)化方法中,人工蜂群優(yōu)化(Artificial Bee Colony,ABC)[4]是2003 年由 Teodorovic 在 Seeley建立的蜂群自組織模擬模型的基礎(chǔ)上提出的一種新的進化計算算法。由于每次迭代中都進行全局和局部搜索,求解非限制性數(shù)值優(yōu)化函數(shù)的性能比常見的啟發(fā)式算法更具優(yōu)勢。雖然ABC算法在許多優(yōu)化問題中都優(yōu)于粒子群、差分進化等遺傳算法,但是由于進化方式和選擇策略的影響,在快速收斂的同時,算法有時易陷入局部最優(yōu)或早熟收斂。為解決這一問題,將雜草入侵機制(Invasive Weed Optimization,IWO)[5]引入 ABC 算法,以便改善上述問題。
本文提出了一種陣風(fēng)減緩控制系統(tǒng)設(shè)計方案,并通過基于雜草入侵機制的人工蜂群優(yōu)化算法(IWOABC)實現(xiàn)其控制參數(shù)設(shè)計。在飛機遭到垂直陣風(fēng)干擾的情況下,評估了該方案的控制效果,以驗證該系統(tǒng)改善飛機乘坐品質(zhì)的特性。
1 陣風(fēng)減緩控制系統(tǒng)設(shè)計
1.1 系統(tǒng)功能
本文僅討論在垂直陣風(fēng)作用下的載荷減緩控制系統(tǒng)設(shè)計,其功能為:
(1)實現(xiàn)機體載荷減緩:較少因陣風(fēng)擾動產(chǎn)生的附加法向過載;
(2)實現(xiàn)乘坐品質(zhì)控制:保證乘員在大氣擾動下的乘坐舒適性,滿足美軍標(biāo)MIL-F-9490D中有關(guān)乘坐品質(zhì)指標(biāo)的要求。
1.2 構(gòu)成方案
陣風(fēng)減緩控制系統(tǒng)基本有兩種控制方案:開環(huán)控制與閉環(huán)控制。
(1)開環(huán)控制:通過直接測量大氣擾動,驅(qū)動相應(yīng)的操縱面,實現(xiàn)對大氣擾動不變性控制。優(yōu)點是系統(tǒng)設(shè)計不影響系統(tǒng)的穩(wěn)定性,缺點在于它的有效性取決于大氣擾動的精確測量,而在實際中,直接進行大氣擾動測量是非常困難的。
(2)閉環(huán)控制:通過測量陣風(fēng)引起的過載,采用直接力控制相應(yīng)的飛機操縱面來降低陣風(fēng)作用于機翼上的載荷。優(yōu)點是不需要對陣風(fēng)進行精確測量,缺點在于飛行控制系統(tǒng)的穩(wěn)定性會受到影響。
在研究了大量國內(nèi)外所采用的控制方案基礎(chǔ)上,本文采用閉環(huán)陣風(fēng)減緩控制方案,以減輕陣風(fēng)給飛機帶來的機翼結(jié)構(gòu)疲勞。
1.2.1 陣風(fēng)和飛機綜合模型
垂直陣風(fēng)引起的等效氣動效果為速度和迎角增量(Δv,Δαg),相當(dāng)于在飛機方程中引入了 Δv和Δαg的干擾。它們對飛機運動的影響相當(dāng)于對v和α的影響。
飛機受到陣風(fēng)作用的縱向運動方程為:

式中,A和B分別為飛機的系統(tǒng)陣和控制陣;q為俯仰角速度;θ為俯仰角;δa和δe分別為副翼和升降舵偏轉(zhuǎn)角。
1.2.2 陣風(fēng)減緩閉環(huán)控制系統(tǒng)設(shè)計
本文取俯仰角速率和法向加速度作為反饋信號,選取外側(cè)副翼和升降舵作為陣風(fēng)減緩系統(tǒng)的直接升力操縱面。在加速度反饋通道中,使用加速度驅(qū)動副翼不僅可以有效地抑制引起法向過載的陣風(fēng)干擾,使航跡控制更為精確,還能有效改善乘坐品質(zhì),減少飛行員的工作負(fù)擔(dān);通道上的高通濾波器可以改善飛機長周期的穩(wěn)定性。在角速率反饋通道中,將升降舵作為力矩補償操縱面,抵消副翼偏轉(zhuǎn)將會引起飛機的角運動,實現(xiàn)飛機的穩(wěn)定控制;通道上的低通濾波器可以恰當(dāng)?shù)卣{(diào)整飛機的操縱品質(zhì)。具體框圖如圖1所示。
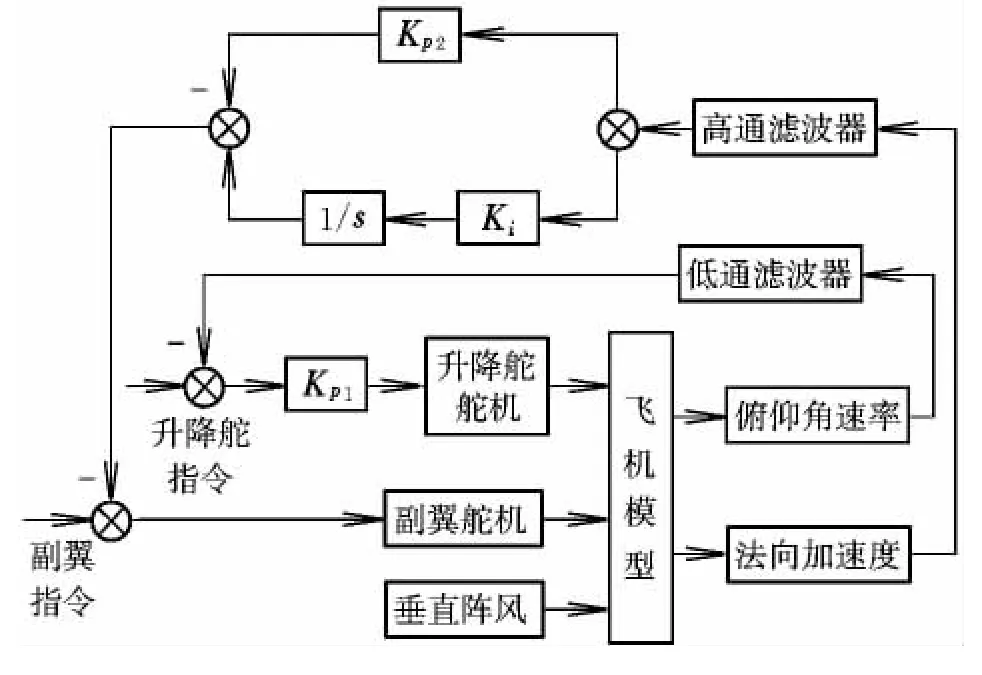
圖1 閉環(huán)控制系統(tǒng)框圖Fig.1 Block diagram of closed-loop control system
法向過載響應(yīng)的減緩率為ζ,則:

1.2.3 乘坐品質(zhì)評價準(zhǔn)則
在MIL-F-9490D中,沒有顯示比例系數(shù)的取值,所以不便于使用。這里列出在工程中常用的乘坐品質(zhì)評價指標(biāo):

將計算所得指標(biāo)數(shù)值分等級來評定乘坐品質(zhì),具體如表1所示。
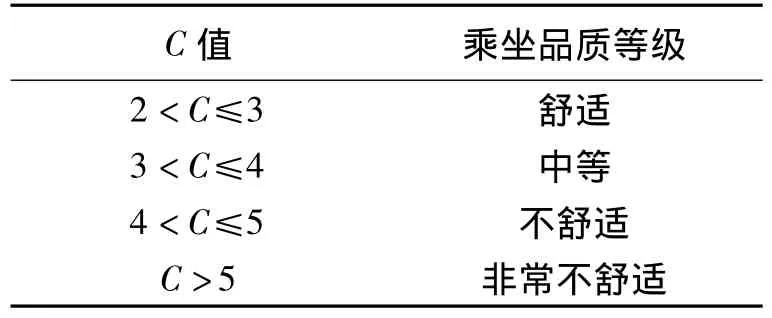
表1 乘坐舒適性指標(biāo)Table 1 Ride comfort index
1.3 陣風(fēng)減緩控制律設(shè)計
1.3.1 控制律設(shè)計
如圖1所示,陣風(fēng)減緩控制系統(tǒng)是在增穩(wěn)控制系統(tǒng)的基礎(chǔ)上進行設(shè)計的。增穩(wěn)控制系統(tǒng)采用比例控制(P),控制參數(shù)為Kp1;陣風(fēng)減緩系統(tǒng)采用比例加積分(PI)控制,控制參數(shù)分別為Kp2和Ki。
本文在無陣風(fēng)減緩控制的情況下,優(yōu)化對象為增益Kp1;在有陣風(fēng)減緩控制的情況下,優(yōu)化對象為圖中所示的全部3個增益(Kp1,Kp2和Ki),目的均是使法向過載的均方根值最小。
1.3.2 基于IWOABC算法的控制參數(shù)設(shè)計
在ABC算法[6]中:Ns為蜜蜂總數(shù);Ne為采蜜蜂種群規(guī)模;Nu為跟隨蜂種群規(guī)模,Ne=Nu;D為搜索空間維度,S=RD為個體搜索空間;SNe為采蜜蜂種群空間。若xi∈S(i≤Ne)是Ne的個體,則X=(x1,…,xNe)代表一個采蜜蜂種群。X(0)為初始采蜜蜂種群;X(n)為第n代的采蜜蜂種群;f:S→R+表示適應(yīng)度函數(shù)。具體算法步驟為:
(1)當(dāng) n=0,隨機生成 Ns個可行解 X=(x1,…,xNe),具體隨機產(chǎn)生的可行解xi為:

(2)對于第n步的采蜜蜂xi(n),在當(dāng)前位置向量附近領(lǐng)域進行搜索新的位置,搜索公式為:

式中,j∈{1,2,…,D};k∈{1,2,…,Ne},且 k≠i,j和k均隨機生成為[-1,1]之間的隨機數(shù),同時保證V∈S。
(3)采用貪婪選擇算子在采蜜蜂搜索到的新位置vi和原向量xi中選取具有更優(yōu)適應(yīng)度的保留給下一代的種群,記作:Ts:S2→S,其概率分布為:

貪婪選擇算子保證了種群能夠保留精英個體,使得進化方向不會倒退,顯然,Ts分布與時刻 n無關(guān)。
(4)各跟隨蜂依照采蜜蜂種群適應(yīng)度值大小選擇一個采蜜蜂,并在其鄰域內(nèi)同樣進行新位置的搜索(類似步驟(2))。
該選擇算子是在一個采蜜蜂種群內(nèi)選擇一個個體,采用輪盤賭選擇方式,選擇概率公式為:

式中,TS1:SNe→S,其概率分布與當(dāng)前時刻n無關(guān)。
(5)同步驟(2)和步驟(3),記下種群更新過后達(dá)到的最新適應(yīng)度值fbest及其對應(yīng)的位置(x1,x2,…,xD)。
(6)當(dāng)在某只采蜜蜂的位置周圍搜索次數(shù)Bas到達(dá)一定次數(shù)限制Limit而仍沒有滿足條件時,重新隨機初始化這個采蜜蜂的位置。

(7)如果滿足停止條件,終止計算并輸出最優(yōu)適應(yīng)度值 fbest及其對應(yīng)的位置(x1,x2,…,xD),否則轉(zhuǎn)向步驟(2)。
ABC算法較好地平衡了全局探索和局部開發(fā)的能力,具備較快的收斂速度,但是受到選擇策略和進化方式的影響,容易陷入局部最優(yōu)或早熟收斂。式(7)輪盤賭式的選擇策略是一種基于貪婪策略的方式,容易忽視非最優(yōu)蜜源的貢獻而陷入局部最優(yōu),降低種群多樣性,不利于搜索全局最優(yōu)解;式(5)的進化方式是形式的交叉方式,一定程度上避免了陷入局部最優(yōu),但是交叉存在的盲目性,有可能降低算法的收斂速度。
為了解決以上不足,將IWO算法中子代生長繁殖和空間分布機制引入到ABC算法,對原有選擇策略和進化方式進行改進,具體如下:
為避免因輪盤賭的選擇方式使跟隨蜂過于被吸引到最優(yōu)蜜源周圍,借鑒IWO中雜草產(chǎn)生種子數(shù)的方式,限制蜜源能吸引蜜蜂的數(shù)量,具體為:

式中,bmax,bmin,bn為第n個蜜源最多、最少和實際吸引跟隨蜂的數(shù)量;f為當(dāng)前蜜源適應(yīng)度函數(shù)值;fmin和fmax分別為當(dāng)前迭代所有蜜源的適應(yīng)度最小值和最大值為向下取整運算符。按蜜源適應(yīng)度值fmax→fmin的順序,用式(6)計算依次各蜜源所能吸引蜜蜂的數(shù)量,直至吸引完所有的跟隨蜂。
為了降低式(2)交叉方式的盲目性,使跟隨蜂在蜜源周邊更合理地分布,借鑒雜草子代的空間分布機制,將跟隨蜂按正態(tài)分布N(0,σ2)隨機飛到目標(biāo)蜜源附近,進行鄰域搜索。隨機迭代的標(biāo)準(zhǔn)差更新公式為:

式中,σini,σfin,σiter分別為標(biāo)準(zhǔn)差的初始值、最終值和當(dāng)前值;Maxiter為最大迭代次數(shù);Iter為當(dāng)前迭代次數(shù);n為非線性調(diào)節(jié)因子,通常取n=3。
2 仿真分析
2.1 基準(zhǔn)測試函數(shù)仿真
為驗證IWOABC算法改進的有效性,與原ABC算法采用相同的基準(zhǔn)測試函數(shù)進行仿真對比。限于篇幅,這里僅列出測試函數(shù)Sphere和Griewank的測試結(jié)果,測試維數(shù)100維,各維搜索空間為(-100,100),這兩個函數(shù)的極小值均為0。為消除單次測試的隨意性,連續(xù)測試20次,取測試結(jié)果最小值、平均值和標(biāo)準(zhǔn)差進行比較。Ns=30,Ne=15,Nu=15,Maxiter=2 500,Limit=100,bmax=4,bmin=1,σini=50,σfin=0.05。測試結(jié)果如表2所示,可見改進后的算法較原有算法具有更強的尋優(yōu)能力。
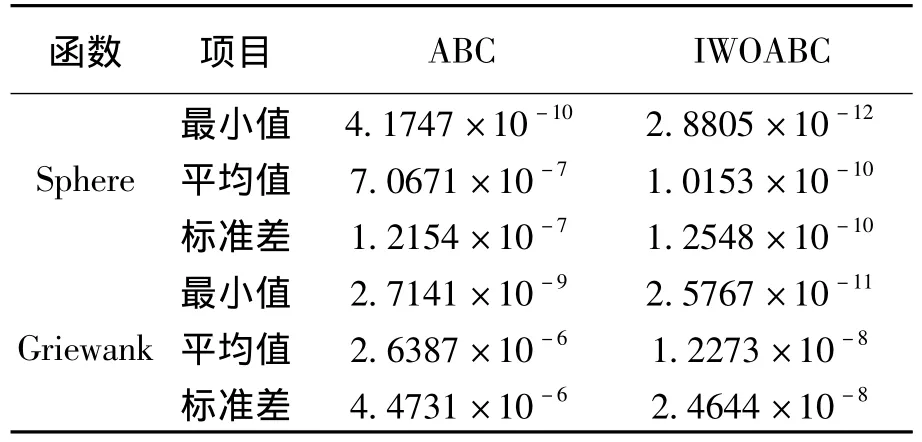
表2 基準(zhǔn)測試函數(shù)測試結(jié)果Table 2 Test results of benchmark function
2.2 陣風(fēng)減緩仿真
本文仿真的系統(tǒng)模型為某大型運輸機。仿真條件為:飛行高度5 km;巡航速度為170 m/s;副翼和升降舵特性均為30/(s+30)。選取Dryden連續(xù)陣風(fēng)和半波長1-cos型離散陣風(fēng)模型。中等連續(xù)陣風(fēng)的均方根值為1.810 3;中等離散陣風(fēng)的幅值為3.5 m/s。本文優(yōu)化的目標(biāo)為使法向過載均方根值最小。由于ABC算法的適應(yīng)度函數(shù)為求大型,因此將適應(yīng)度函數(shù)設(shè)計為:

由于需要求解3個增益參數(shù),所以搜索維度D=3,各維取值范圍與增益參數(shù)取值范圍[-3,3]相同。IWOABC算法的參數(shù)設(shè)置為:Ns=30,Ne=Nu=0.5Ns,Maxiter=200,Limit=20,bmax=4,bmin=1。
IWOABC算法優(yōu)化完成后,得到的控制律增益參數(shù)為:0.102 5,1.016 4,-2.248 0(經(jīng)過大量仿真驗證,針對各種陣風(fēng)程度,得到的控制律參數(shù)中均能實現(xiàn)其陣風(fēng)減緩。限于篇幅,僅以中度離散陣風(fēng)干擾下為例進行有陣風(fēng)減緩控制參數(shù)尋優(yōu))。在中度垂直陣風(fēng)干擾下,有無陣風(fēng)減緩控制的法向過載響應(yīng)曲線如圖2和圖3所示。

圖2 連續(xù)陣風(fēng)干擾下有無陣風(fēng)減緩控制的過載曲線Fig.2 Load response curve under continuous gust with gust alleviation control or not
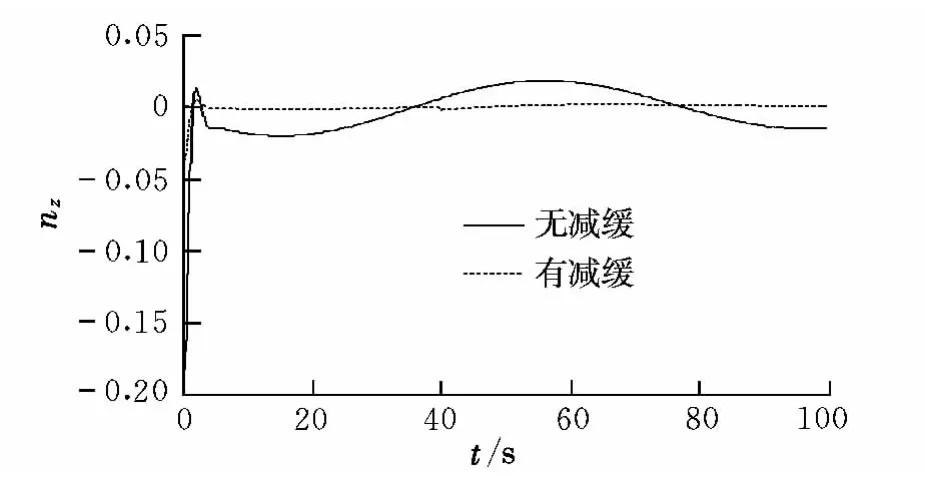
圖3 離散陣風(fēng)干擾下有無陣風(fēng)減緩控制的過載曲線Fig.3 Load response curve under discrete gust with gust alleviation control or not
由圖2和圖3可知,采用陣風(fēng)減緩控制系統(tǒng)的飛機對法向過載增量有比較明顯的減緩作用。
將過載減緩效果進行量化,以過載響應(yīng)量的均方根值的變化率來評價控制系統(tǒng)減緩的效果。連續(xù)和離散陣風(fēng)干擾下法向過載的均方根值分別為nzD和nzL,減緩效果如表3所示。

表3 法向過載均方根值與減緩率Table 3 RMS and decreasing rate of normal load
由表3可知,采取陣風(fēng)控制系統(tǒng)的法向過載增量的減緩率較高,尤其是在離散陣風(fēng)干擾情況下,減緩效果更加明顯。
為了準(zhǔn)確評價模型飛機的乘坐品質(zhì),選取飛機質(zhì)心為基點,對陣風(fēng)干擾下的過載響應(yīng)進行乘坐品質(zhì)C準(zhǔn)則評估。將無陣風(fēng)減緩控制和有陣風(fēng)減緩控制分別記為C0和C1。具體數(shù)據(jù)如表4所示。

表4 乘坐品質(zhì)評價Table 4 Evaluation of ride quality
由表4的結(jié)果可以看出,在不同陣風(fēng)類型的影響下,采用陣風(fēng)減緩控制系統(tǒng)的飛機能在一定幅度上改善乘坐舒適度指數(shù)。
3 結(jié)束語
本文針對大型客機在垂直陣風(fēng)干擾下會產(chǎn)生較大的附加法向載荷,提出了一種基于乘坐品質(zhì)改善和載荷減緩的閉環(huán)控制方案。此外,為提高人工蜂群優(yōu)化算法對控制律參數(shù)設(shè)計的能力,引入雜草入侵機制改進算法,并應(yīng)用到陣風(fēng)減緩控制系統(tǒng)的參數(shù)尋優(yōu)中。仿真結(jié)果表明,在連續(xù)和離散陣風(fēng)干擾的情況下,應(yīng)用上述控制方法能改善因陣風(fēng)引起的乘坐品質(zhì)下降問題,而且在離散陣風(fēng)干擾的情況下,減緩效果最為明顯。
[1] 文傳源.現(xiàn)代飛行控制[M].北京:北京航空航天大學(xué)出版社,2004:187-192.
[2] 毛珊珊,張平.垂直陣風(fēng)作用下乘坐品質(zhì)控制系統(tǒng)設(shè)計[C]//中國制導(dǎo)、導(dǎo)航與控制學(xué)術(shù)會議.北京,2012:565-568.
[3] 高金源.飛機電傳操縱系統(tǒng)與主動控制技術(shù)[M].北京:北京航空航天大學(xué)出版社,2005:161-168.
[4] Teodorovic D,Dell M O.Bee colony optimization_a cooperative learning approach to complex transportation problems[C]//Proceedings of 10th EWGT Meeting and 16th Mini EURO Conference.Poznan,Poland,2005:51-60.
[5] Mehrabian A R,Lucas C.A novel numerical optimization algorithm inspired from weed colonization[J].Ecological Informatics,2006,1(4):355-366.
[6] 段海濱,張祥銀,徐春芳.仿生智能計算[M].北京:科學(xué)出版社,2011:93-94.
猜你喜歡
青少年科技博覽(中學(xué)版)(2022年6期)2022-08-31 09:03:40
小哥白尼(軍事科學(xué))(2022年3期)2022-06-09 03:11:24
環(huán)球時報(2022-05-30)2022-05-30 15:16:57
小哥白尼(趣味科學(xué))(2020年12期)2021-01-18 06:15:26
民用飛機設(shè)計與研究(2020年4期)2020-11-27 17:34:02
青少年科技博覽(中學(xué)版)(2020年2期)2020-05-21 03:35:16
當(dāng)代陜西(2019年11期)2019-06-24 03:40:28
百科探秘·航空航天(2017年11期)2017-12-20 07:31:34
百科探秘·航空航天(2017年12期)2017-08-15 00:55:45
作文周刊·小學(xué)一年級版(2017年9期)2017-06-20 00:19:33
