空中加油自主會合的制導與控制
2014-12-25 09:20:06袁鎖中王新華鄭峰嬰
飛行力學 2014年1期
袁鎖中,王新華,鄭峰嬰
(1.南京航空航天大學 自動化學院,江蘇 南京210016;2.南京航空航天大學 航天學院,江蘇南京210016)
0 引言
空中加油技術在現代戰爭中具有非常重要的作用,在減少飛機起飛/著陸次數的前提下,有效增大了受油機的航程、續航時間和有效載荷[1-2]。自動空中加油是指在人的指令、監控下,實現有人或無人駕駛飛機的加油功能的自動化。
空中加油分會合、對接、編隊保持與脫離四個階段。空中加油會合段要求受油機在保證安全性的前提下,能夠自主飛行到期望的會合位置,并要求受油機的最終速度和航向與加油機的速度和航向一致。空中加油受油機與加油機的會合對接是一個三維空間內的飛機制導與控制問題。文獻[3-4]研究了空中加油會合問題,給出了平面內受油機的會合制導指令,沒有考慮高度通道的引導問題。文獻[5]將導彈制導與自動著陸的思想用于受油機的會合制導控制,基于線性方程采用模型跟蹤的方法設計了飛行控制系統。文獻[6]采用改進帶終端碰撞角約束的比例導引律設計方法,針對Backstepping非線性控制設計了飛行控制律,在制導律的設計中,單獨設計了高度通道制導律。受油機與加油機會合的飛行過程中,要求受油機的飛行軌跡平滑,飛行狀態平穩。
本文基于視線法的原理,采用比例制導方法生成受油機法向與側向的會合制導指令。采用反饋線性化方法設計角速率控制,在此基礎上,分別設計法向加速度控制、側向加速度控制及前飛速度控制系統,并通過方向舵實現側向的協調控制。最后基于六自由度的非線性受油機模型進行仿真驗證。
1 受油機空中加油會合制導與控制系統結構
如圖1所示,空中加油會合段制導與控制系統結構由制導律模塊、受油機飛行控制模塊、受油機與加油機動力學及相對運動關系解算模塊組成。由加油機和受油機的相對位置、速度等參數,通過制導律解算出受油機法向和側向加速度以及縱向速度的指令,再經過飛行控制,使得受油機能以合適的航跡飛行并到達指定位置等待加油。

圖1 自主空中加油制導與控制結構圖Fig.1 Block diagram of the guidance and control of aerial refueling
2 受油機與加油機相對運動關系
圖2描述了在空中加油會合過程中的加油機和受油機間的幾何關系。
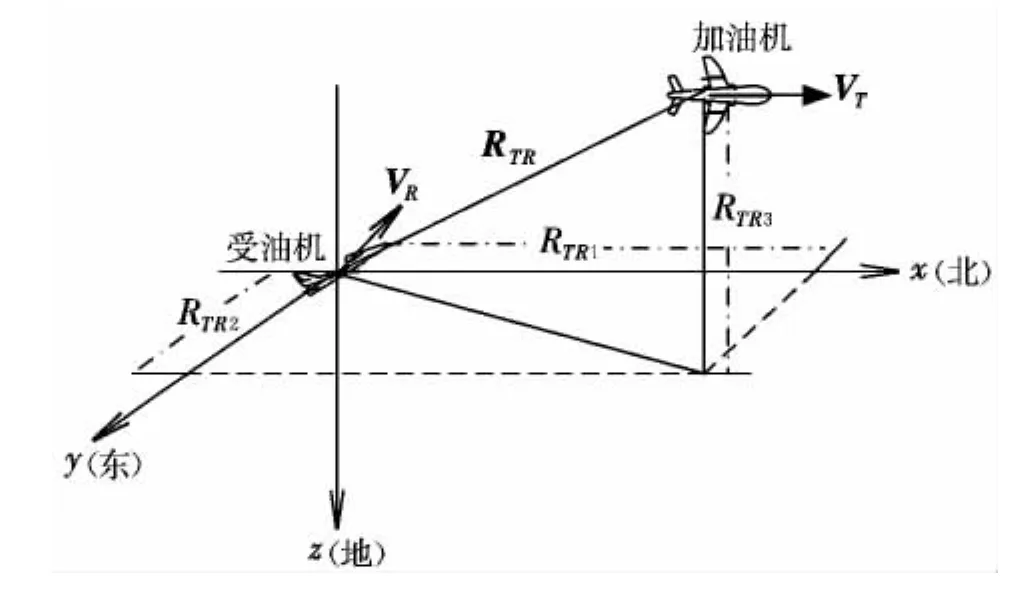
圖2 空中加油時的幾何關系Fig.2 Profile of the geometry in aerial refueling
受油機與加油機的接近速度為:
把受油機與加油機的連線定義為視線,在地面坐標系下的視線角速率為:

將在地面坐標系下的視線角速率轉化為受油機航跡坐標系下的視線角速率:

式中,γ=θ-α為飛機縱向航跡角;χ=ψ+β為飛機的側向航跡角。
3 自主會合制導律設計
3.1 基于比例制導的法向與橫向加速度指令
受油機與加油機會合的飛行過程與導彈攻擊空中目標類似,故采用比例制導的方法,可以由視線角速率得到受油機的加速度指令[7-8]。
法向加速度指令為:

橫向加速度指令為:

式中,N為比例增益。上述公式已經轉化為受油機機體軸的加速度指令,獲得的加速度指令受到飛機能夠承受的最大加速度的限制[9-10]。

式中,RTRB=[RTRB1RTRB2RTRB3]T為在受油機機體坐標系下的加油機和受油機的相對位置。

3.2 前向速度指令
空中加油會合過程中,加油機通常勻速直線飛行,受油機要先加速接近加油機。當受油機接近加油機時,受油機的速度必須減速到與加油機的速度相等,故需要精確控制受油機的飛行速度。
由于受油機的速度控制是通過改變發動機油門大小實現的,而發動機響應有延遲,導致速度響應延遲,有可能發生碰撞的危險。基于上述考慮,速度通道的加速度指令設計為:

為了保證受油機不超過加油機或者與之相撞,當距離小于某一范圍時設定k大于1;否則k=1。
對式(10)的加速度指令積分,可以得到要求的前向速度指令:

4 受油機的飛行控制律設計
受油機的動力學方程為:


圖3 受油機飛行控制結構Fig.3 Block diagram of the receiver flight control system
式中,x=[V α β p q r φ θ ψ X Y Z]T;u=[δeδaδrδp]T,δp為飛機油門開度。
受油機飛行控制結構如圖3所示。首先根據飛機的角運動動力學特性比線運動動力學特性快的特點,采用時標分離,對受油機的角運動動力學采用反饋線性化的方法,實現對三軸角速率的解耦與控制。在此基礎上,再分別設計受油機前飛速度、側向加速度、法向加速度和側向協調控制律,實現對制導回路指令的跟蹤。
4.1 角速率回路控制律
考慮到飛機角運動比線運動快的特點,采用時標分離,將飛機的角運動與線運動方程分離,只考慮飛機的角運動動力學模型:

式中,ω =[p q r]T;uδ=[δeδaδr]T;xr為其他狀態變量。
選取虛擬控制量:

代入式(13),可得:

對上式可設計線性控制器以跟蹤角速率指令ωr。為了在階躍輸入下的穩態誤差為零,采用比例積分的形式,定義:

由式(15)和式(16)構成的增廣系統狀態方程為:


式中,[KPKI]為反饋控制陣,其中 KP,KI分別為3×3的對角陣。加入指令信號微分,加快系統的響應。定義代價函數:

選擇權矩陣Q,R,通過求解Ricatti方程,可以得到相應的控制陣。最終角速率回路的控制律為:

對其采用如下控制:
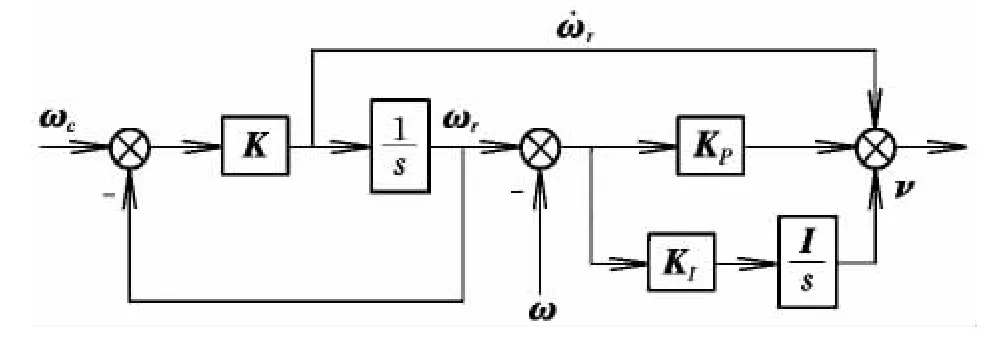
圖4 指令濾波器及PI控制結構Fig.4 Block diagram of command filter and PI control
4.2 法向加速度控制律
受油機的法向加速度控制是通過改變飛機的俯仰角速率實現的,故法向加速度控制律可設計為:

由制導系統生成的法向加速度指令與飛機實際的法向加速度存在誤差時,通過上述控制律生成俯仰角速率指令,經過角速率回路控制律實現對飛機法向加速度的控制。
4.3 側向加速度控制律
受油機的側向航跡的控制是通過飛機滾轉實現的。由飛機協調轉彎的受力分析,側向加速度與滾轉角有如下關系:

故由制導系統得到的受油機側向加速度指令可形成如下的滾轉角指令:

由滾轉角指令通過比例積分,得到滾轉角速率指令為:

4.4 側向協調控制律
受油機的方向舵通道主要用于協調控制,目的是消除飛機的側滑角,飛機的側滑角速率可用下式表示:

由上式可得到對應的偏航角速率指令:

其中:

4.5 前向速度控制律
由制導系統得到的前向加速度指令積分得到速度指令信號,該指令信號與飛機當前的速度比較,通過PID形成油門控制信號。其控制律為:

5 仿真驗證與分析
為驗證所設計系統的控制效果,對圖1的空中加油會合控制系統進行數值仿真。受油機數學模型采用某飛機六自由度動力學模型,加油機采用簡化的質點動力學模型。
假定加油機在6 km高度,以180 m/s的速度沿北向直線平飛。受油機的初始飛行高度為5 km,位于加油機飛行方向的右后方,距離加油機后方4 km,右側1 km的位置,以初始速度250 m/s飛行,與加油機同向飛行。
當受油機接收到會合指令后,根據受油機與加油機當前的位置關系,制導系統生成相應的加速度指令信號,通過飛行控制系統,控制飛機按照一定的規律與加油機會合。圖5為空中加油會合過程中的受油機與加油機在地面坐標下的三維飛行軌跡。圖6為對應的受油機與加油機在會合過程中的位置誤差曲線。

圖5 加油機與受油機會合的三維飛行軌跡Fig.5 3D flight trajectory of receiver and tanker

圖6 地面坐標系下的兩機位置誤差曲線Fig.6 Time histories of trajectory error in earth fixed axes
圖7 為會合過程中受油機的姿態變化曲線。圖8為受油機的速度、迎角及側滑角曲線。仿真結果表明,所設計的系統能夠根據受油機與加油機的位置誤差形成制導指令,通過飛行控制系統,最終控制受油機飛行并與加油機實現會合,會合過程受油機飛行軌跡平滑,飛行狀態平穩。為下一步實現受油機受油插頭與加油機加油錐套的對接奠定基礎。
由于制導算法中涉及受油機與加油機距離的倒數,當距離接近零時會導致系統發散。在實際會合過程中,當受油機接近到加油機錐套后方25 m、下方3 m左右時,會合控制模式結束,基于視線的制導律終止。轉入到需要對受油機軌跡精確控制的對接控制模式。

圖7 受油機姿態響應曲線Fig.7 Time histories of receiver attitude
6 結束語
本文根據由GPS測量的受油機與加油機的三維空間位置,基于視線法原理,采用比例制導生成受油機的會合制導指令,制導形式簡單,易于工程實現。采用反饋線性化方法實現了角速率回路的解耦與控制,在此基礎上,分別設計了法向加速度控制、側向加速度控制、方向舵協調控制及速度控制,滿足制導指令跟蹤要求。基于六自由度非線性動力學模型的仿真結果表明,受油機會合的飛行軌跡平滑,飛行狀態穩定,具有良好的動態性能。
[1] Joseph P N,Jacob L H.Automated aerial refueling:extending the effectiveness of unmanned air vehicles[R].AIAA-2005-6005,2005.
[2] Dibley R P,Allen M J,Nabaa N,et al.Autonomous airborne refueling demonstration,phase I flight-test results[R].NASA/TM-2007-214632,2007.
[3] Brian S B.Autonomous unmanned aerial vehicle rendezvous for automated aerial refueling[D].Ohio:Air Force Institute of Technology,2007.
[4] Austin L S.Proportional navigation with adaptive terminal guidance for aircraft rendezvous[J].Journal of Guidance,Control,and Dynamics,2008,31(6):1832-1835.
[5] Jane-wit Kampoon,Atilla Dogan.Guidance of receiver aircraft to rendezvous with tanker in the presence of wind[R].AIAA-2010-8326,2010.
[6] 郭軍,董新民,徐躍鑒,等.無人機空中加油自主會合控制器設計[J].控制與決策,2010,25(4):567-571.
[7] Yoshimasa O,Takeshi K.Flight control for automatic aerial refueling via PNG and LOS angle control[R].AIAA-2005-6268,2005.
[8] Imado F,Uehara S.High-g barrel roll maneuvers against proportional navigation from optimal control viewpoint[J].Journal of Guidance,Control,and Dynamics,1998,21(6):876-881.
[9] Dogan A.Venkataramannan S.Nonlinear control for reconfiguration of unmanned aerial vehicle formation[J]Journal of Guidance,Control,and Dynamics,2005,28(4):667-677.
[10] Pedro J O,Panday A,Dala L.A nonlinear dynamic inversion_based neurocontroller for unmanned combat aerial vehicles during aerial refueling[J].International Journal of Applied Mathematics and Computer Science,2013,23(1):75-90.
[11]吳森堂,費玉華.飛行控制系統[M].北京航空航天大學出版社,2005:56-61.
猜你喜歡
科普童話·神秘大偵探(2023年1期)2023-05-30 12:48:10
小哥白尼(軍事科學)(2022年3期)2022-06-09 03:11:24
環球時報(2022-05-30)2022-05-30 15:16:57
民用飛機設計與研究(2020年4期)2020-11-27 17:34:02
當代陜西(2019年11期)2019-06-24 03:40:28
測控技術(2018年5期)2018-12-09 09:04:26
電子測試(2018年18期)2018-11-14 02:30:34
作文周刊·小學一年級版(2017年9期)2017-06-20 00:19:33
電信科學(2016年10期)2016-11-23 05:11:56
小學生導刊(低年級)(2016年8期)2016-09-24 22:09:04
