硬巖隧道掘進機推進系統姿態自適應控制
2015-01-08 06:03:14龔國芳吳偉強饒云意周建軍
浙江大學學報(工學版) 2015年10期
關鍵詞:系統
張 振,龔國芳,吳偉強,劉 統,饒云意,周建軍
(1.浙江大學流體動力與機電系統國家重點實驗室,浙江杭州310027;2.中鐵隧道集團盾構及掘進技術國家重點實驗室,河南鄭州450003)
硬巖隧道掘進機推進系統姿態自適應控制
張 振1,龔國芳1,吳偉強1,劉 統1,饒云意1,周建軍2
(1.浙江大學流體動力與機電系統國家重點實驗室,浙江杭州310027;2.中鐵隧道集團盾構及掘進技術國家重點實驗室,河南鄭州450003)
針對全斷面硬巖隧道掘進機(TBM)油缸并聯推進系統產生的推進干擾力降低關鍵部件使用壽命和隧道開挖精度的問題,提出姿態自適應推進系統.建立推進機構的數學模型,將推進油缸分為2組,對2組推進油缸的大腔壓力進行動態分配.使用ADAMS AMESim Simulink三軟件聯合仿真,對比分析并聯推進系統與姿態自適應推進系統.結果表明:在額定推進力和0.1°、0.3°、0.5°調向角度下,姿態自適應推進系統產生的推進干擾力為并聯推進系統的2%,姿態自適應推進系統平行于主梁的推進正壓力的超調小于5%.姿態自適應推進系統可以顯著減小推進干擾力,具有良好的穩定性.
隧道掘進機(TBM);推進系統;姿態自適應;干擾力
全斷面硬巖隧道掘進機(hard rock tunnel boring machine,TBM),是集機械、液壓、電氣、控制、巖土力學等多學科技術于一體,適用于硬巖地質的一次成型的大型隧道開挖裝備[1-2].TBM施工法以其高效、安全、對環境影響小的優點,已經在多數硬巖隧道開挖場合取代了鉆爆法等傳統方法[3-4].單對水平支撐敞開式TBM適用于巖石完整性較好的隧洞,具有價格便宜、維護方便等優點,應用最廣泛.推進系統是TBM的關鍵系統之一,它為刀盤提供頂緊巖石掌子面的正壓力,保證破巖的正常進行,同時推動刀盤前進.推進系統壓力的控制,決定掘進的效率、關鍵元件的使用壽命和隧道的開挖質量.
TBM推進系統是由4支相同規格的雙作用液壓缸作為執行元件.目前工程中為4個推進油缸并聯的形式,任意工況下所有推進油缸無桿腔的壓力均相等,使得TBM在開挖曲線隧道進行姿態調整或直線隧道進行姿態糾偏后,由4個推進油缸共同作用的推進合力不再沿掘進方向,刀盤受到垂直于掘進方向的有害力.在該條件下,刀盤的邊刀易損壞,主梁焊縫易開裂,護盾對圍巖的擾動增加,也會造成刀盤中心偏離預定軌跡,嚴重影響了關鍵部件的使用壽命,降低了隧道的開挖精度.國內外許多學者對TBM進行研究.Yagiz等[5]提出基于2種非線性工具的TBM性能預測,Gholamnejad等[6]將人工神經網絡應用到TBM掘進速度預測中,龔秋明等[7]研究巖體條件、TBM機器參數和運行參數對TBM掘進速度的影響.目前,研究主要集中在使用不同的控制策略對TBM進行選型、性能預測以及探究施工環境對TBM工作的影響,沒有對TBM推進機構和液壓系統等實際執行系統進行研究.本文建立推進機構的數學模型,分析當前推進系統的不足,提出推進缸分組姿態自適應的控制方法,減小了垂直于掘進方向的有害分力,實現了TBM推進系統的姿態調整自適應.以羅賓斯TBM253-282為模型,通過MATLAB、AMESim、ADAMS 3個軟件的聯合仿真驗證了該系統的有效性.
1 TBM推進系統工作原理
1.1 TBM工作過程
如圖1所示,敞開式硬巖隧道掘進機主要由刀盤、護盾、主梁、撐靴、推進油缸等構成.工作時撐靴在撐靴油缸的作用下撐緊洞壁,4支規格相同的推進油缸對稱分布在主梁兩側,缸筒連接撐緊洞壁的撐靴.缸桿與主梁相連,通過主梁迫使刀盤壓緊巖石掌子面,使得刀盤上的滾刀能夠貫入到巖石掌子面,電機驅動刀盤旋轉,刀盤裝有刀具,實現對巖石的切削[8].TBM每完成一個推進行程后,后支撐油缸伸出撐緊地面,撐靴油缸帶動撐靴收回,推進油缸復位帶動撐靴等部件前移,完成一次換步.TBM的工作過程是不斷循環推進與換步的過程.

圖1 隧道掘進機三維模型Fig.1 Three-dimensional model of tunnel boring machine
1.2 TBM推進液壓系統
推進液壓系統包括高壓低速回路和低壓高速回路.高壓低速回路用于一般掘進時,低壓高速回路一般用于TBM迅速通過隧洞初始段的預挖隧道.
如圖2所示為TBM推進系統的液壓原理圖.在高壓推進時通過預先設定壓力值的減壓閥1控制4支推進油缸無桿腔的壓力,電磁換向閥2.1控制高壓推進時刀盤的前進后退.電磁換向閥2.2通過控制插裝閥4.1~4.6控制刀盤的快速前進和后退.

圖2 隧道掘進機推進液壓系統Fig.2 Thrust hydraulic system of tunnel boring machine
1.3 TBM推進機構數學模型
在開挖曲線隧道和進行軌跡糾偏時,對TBM姿態進行調整,通過擺動主梁調整掘進方向.主梁偏轉后,左右側推進油缸與主梁的夾角不同,造成刀盤所受到的推進合力偏離掘進方向,刀盤受到垂直于掘進方向的干擾力.為了探究推進力隨主梁偏角和推進距離的變化規律,須建立推進機構數學模型.應用廣泛的羅賓斯產品在進行姿態調整時,一般都停止掘進.施工中,為了提高效率,多在每一推進行程的初始位置進行姿態調整.本文以該種工作順序為例,建立水平姿態調整機構與推進機構的數學模型.本文只探究水平姿態的調整過程,將TBM推進機構簡化為平面機構.
以撐靴油缸中心為A點,以撐靴缸軸線為x 軸,垂直于軸線方向為y軸,作坐標系A-xyz為系A.以主梁中心線與推進油缸桿端耳環中心連接線的交點為A1點,作坐標系A1-x1y1z1為系A1,系A1在主梁角度調整后可以認為旋轉至系A2位置,再沿直線推進后平移至系A3位置.如圖3所示為姿態調整和推進示意圖,標明了各坐標系的位置.任意點在系A中的坐標可以表示為

式中:(r)A為任意點在系A中的坐標,b為某一推進行程初始位置且主梁垂直與撐靴油缸軸線時推進油缸桿端耳環中心到撐靴油缸軸線的距離,(r)A1為任意點在系A1中的坐標.任意點在系A1中的坐標可以表示為

式中:s為刀盤中心到左右推進油缸桿端耳環中心連接線的距離;
其中θ為主梁偏角,規定沿掘進方向向右偏轉為正;(r)A2為任意點在系A2中的坐標.任意點在系A2中的坐標可以表示為
圖3 TBM水平姿態調整與推進示意圖Fig.3 Diagram of horizontal steering and advancing

式中:x為姿態調整后主梁推進的距離,(r)A3為任意點在系A3中的坐標.
工程中TBM上裝有主梁偏轉角傳感器和油缸位移傳感器,因此將主梁推進距離x用主梁偏轉角度θ與推進油缸長度l(取左推進油缸)來表示:

為了簡化公式,在下式中采用x表示.將式(2)、(3)代入式(1),可得

定義系A與系A3分別為機構分析的參考坐標系和固結在機構上的動坐標系.
用向量λ1和λ2在系A中的坐標分別表示沿掘進方向主梁左右側推進油缸在任意時刻的位置姿態:

式中:a為左右推進油缸桿端耳環中心的距離,r'為左右推進缸缸筒端耳環中心距離的一半,c為推進缸缸筒端耳環中心與撐靴缸軸線的距離.

主梁的一方向向量為

推進缸與主梁的夾角可以表示為


式中:β為右側推進油缸與主梁的夾角.
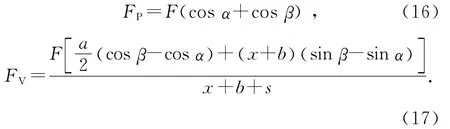
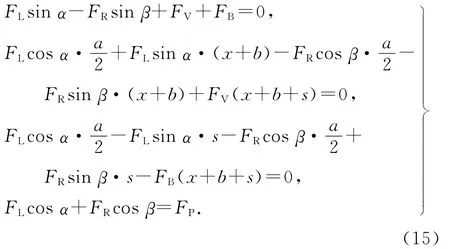
對主梁水平方向進行受力分析,可得

式中:α為左側推進油缸與主梁的夾角.
式中:F=2p A,其中p為推進油缸無桿腔的壓力,A為推進油缸無桿腔的面積;FV為刀盤所受垂直掘進方向的干擾力(推進干擾力),FB為鞍架對主梁的作用力,FP為主梁提供的沿掘進方向的推進力(推進正壓力).根據式(15)可得
將羅賓斯直徑為7.23 m的TBM253-282參數代入式(10)~(13),主要參數如表1所示,可得推進油缸與主梁夾角和推進力在一個推進行程內的變化圖像,如圖4~7所示.以θ為正時為例,說明各參數隨主梁偏角的變化情況.從圖4、5可以看出,推進油缸與主梁的夾角在掘進過程中減小;當主梁偏轉角度增大時,左側推進油缸與主梁的夾角變大,右側推進油缸與主梁的夾角減小.從圖6、7可以看出,推進正壓力在一個推進行程中隨刀盤的前進逐漸增大,推進干擾力隨主梁偏角的增大而增大.
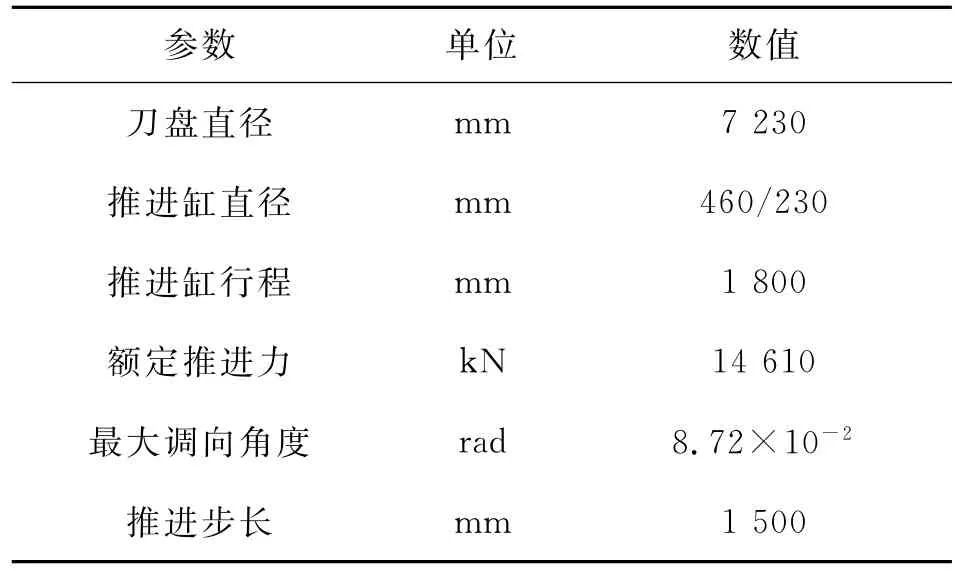
表1 TBM253-282主要參數Tab.1 Main Parameters of TBM253-282
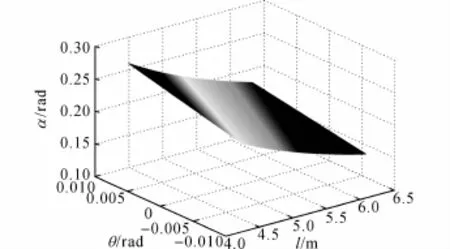
圖4 左側推進油缸與主梁間夾角變化圖Fig.4 Angle between main beam and left thrust hydraulic cylinders

圖5 右側推進油缸與主梁間夾角變化圖Fig.5 Angle between main beam and right thrust hydraulic cylinders

圖6 推進干擾力變化圖Fig.6 Changes of disturbing force
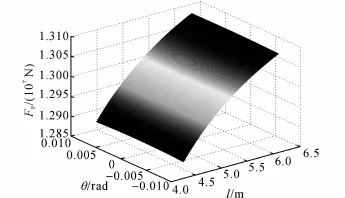
圖7 推進正壓力變化圖Fig.7 Changes of thrust force parallel with main beam
2 姿態自適應推進系統
2.1 分組推進液壓系統
為了降低TBM在進行姿態調整后,推進系統對刀盤邊刀、主梁等關鍵部件的損害以及對隧道開挖軌跡的干擾,本文將主梁兩側的推進油缸分為左、右2組,每組由一個比例減壓閥單獨控制,通過控制左右組推進油缸無桿腔的壓力,保證主梁只對刀盤提供沿掘進方向的正壓力,降低垂直掘進方向的干擾力.如圖8所示為推進缸分組的液壓原理圖,圖中二位四通電磁換向閥6保證TBM在高壓推進時實現分組,低壓快速時仍保持所有推進油缸并聯.比例減壓閥1.1控制左組油缸的壓力,1.2控制右組推進油缸.
先導式比例減壓閥帶有流量穩定器,先導閥流量在流量穩定器的作用下基本保持穩定而不受主閥壓力和主油路流量變化的影響,可以保證先導式比例減壓閥出口的壓力比較精準地跟隨輸入信號變化.在負載突然增大、壓力高于設定值的情況下,通過泄油口泄油,實現推進油缸無桿腔的壓力對任意信號的跟蹤.

圖8 分組推進液壓系統Fig.8 Thrust hydraulic system with cylinders divided in groups
2.2 姿態自適應控制策略
為了減小TBM不同姿態下主梁對刀盤的推進干擾力,提出姿態自適應控制策略.如圖9所示為姿態自適應控制原理框圖,主要包括力方向計算器,力分組求解器和油缸壓力閉環控制由主梁傾角傳感器測得主梁偏角θ,由位移傳感器測得左推進油缸的位移,經過處理后求得左推進油缸的長度l;力方向計算器根據輸入的主梁偏角和推進缸位移長度求解出TBM在當前位置下左右組推進油缸與主梁的夾角;力分組求解器根據當前狀態下TBM刀盤所需的正壓力,求解出左右組推進油缸無桿腔的油液壓力,作為對應比例減壓閥的輸入信號.通過對左、右組推進油缸的壓力分配,優化刀盤的受力狀況.為了提高控制精度,采用PID作為控制器對推進油缸壓力進行閉環控制.利用壓力傳感器測得的壓力信號與力分組求解器輸出的壓力信號的偏差,作為PID控制器的輸入.
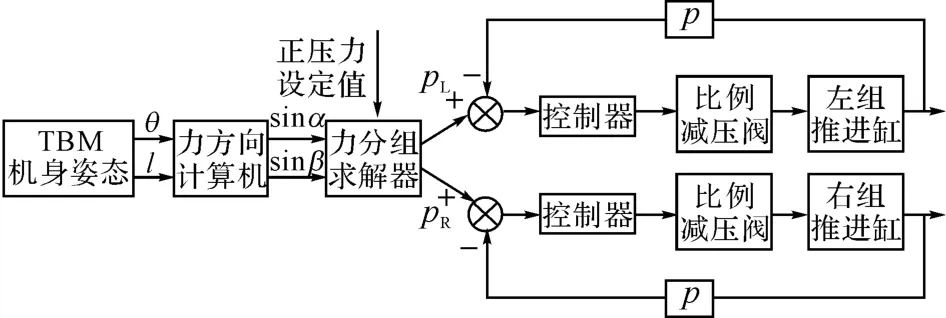
圖9 姿態自適應系統原理圖Fig.9 Working principle of attitude self-adaption system
采用分組推進液壓系統,主梁在水平方向的受力為
式中:FL為左推進油缸作用于主梁上的力,FR為右推進油缸作用于主梁方向上的力.為了保證刀盤所受到的FV為零,根據式(15)可以求得左、右組推進油缸的壓力:

式中:pL為左組推進油缸無桿腔的壓力,pR為右組推進油缸無桿腔的壓力.
3 聯合仿真分析
機電液一體化系統都是由各學科領域的子系統組成,這些部件、子系統相互作用,組成一個有機的整體.為了得到復雜系統整體性能的準確仿真結果,必然涉及到多領域協同仿真[9-10].機電液聯合仿真是指在對系統中的機械、液壓、電子、控制等子系統分別利用各自領域軟件進行建模的基礎上,通過組裝得到整體仿真模型,然后利用不同領域仿真模型的相互協調共同完成大系統仿真的方法[11].聯合仿真發揮了各軟件的優勢,使得建模更加簡單,避免了建立數學模型時對系統的簡化,使得模型更加準確[12-14].
在Solidworks中建立TBM253-282三維模型,導入到ADAMS中進行約束建立動力學模型,在AMESim中建立推進液壓系統的模型,在Simulink中建立控制系統模型.利用ADAMS模擬TBM在實際掘進時位置及姿態的變化,利用軟件自帶函數測得所需的參數,傳遞給Simulink.Simulink在接收到ADAMS傳遞過來的數據后,通過控制系統的運算,對左、右兩組的推進油缸無桿腔的壓力進行分配,并將左、右組油缸所需的壓力傳遞給AMESim.AMES-im接收到壓力信號后,三通比例減壓閥作出響應,AMESim通過Simulink中的接口將油缸輸出力傳遞給ADAMS,最后在MATLAB中控制3個軟件同時進行仿真,最終實現三者的聯合仿真.
3.1 使用ADAMS建立動力學模型
將Solidworks中建立的三維模型導入到ADAMS中,根據TBM的運動關系,建立相應的約束,施加載荷和驅動力.在ADAMS中建立狀態變量,將狀態變量與推進油缸的位移、主梁偏角、驅動力等相關聯,通過狀態變量的傳遞實現與Simulink的數據交換.
3.2 使用AMESim建立推進液壓系統模型
使用AMESim的機械庫、信號庫、液壓庫等建立雙比例閥為核心的液壓系統.如圖10所示為AMESim中搭建的液壓系統模型.AMESim中提供了2種與Simulink的接口模塊,本文采用離散型接口模塊,通訊時間間隔為0.005 s.通過接口模塊,AMESim接收到Simulink傳遞來的油缸速度和比例減壓閥壓力信號,并將油缸輸出力和無桿腔當前的壓力輸出到Simulink中.
3.3 使用Simulink建立控制系統模型
根據分組控制策略,在Simulink中借助S函數編寫力方向計算器和力分組求解器的程序.如圖11所示為控制模型.力方向計算器計算此時左、右組推進油缸與主梁的夾角,力分組求解器輸出左、右組推進油缸無桿腔的壓力.在Simulink中載入ADAMS導出的接口文件,實現與ADAMS的連通,借助Simulink提供的S函數,實現與AMESim的連通.為了防止產生代數環,在控制回路中設置了延時環節[15].
3.4 對比分析
對于減壓閥為主控液壓元件的推進系統,一個行程內減壓閥的設定壓力為定值.根據表1的參數,設置推進力為14 610k N,在主梁偏轉角度范圍內取0.1°、0.3°、0.5°3種工況下進行對比分析.如圖12(a)~(c)所示分別為當主梁偏轉角度為0.1°、0.3°、0.5°時,2種推進系統的推進干擾力曲線.圖中,t為仿真時間,FV為推進干擾力.從圖12可以看出,并聯推進系統推進干擾力分別為27、83、275k N,姿態自適應推進系統在階躍啟動時推進干擾力分別為5、7、12k N,降低為并聯推進系統的5%~20%.穩定后降低為并聯推進系統的2%.
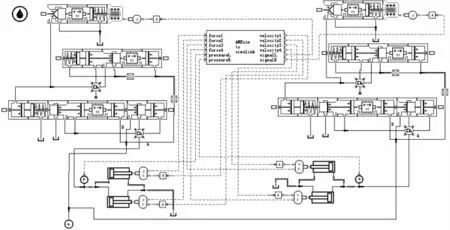
圖10 AMESim中的液壓系統模型Fig.10 Hydraulic system model in AMESim

圖11 Simulink中的控制系統模型Fig.11 Control system model in Simulink
為了驗證姿態自適應系統的穩定性,在45和55 s增加了階躍信號.系統響應如圖13所示.如圖13(a)~(c)分別為當主梁偏轉角度為0.1°、0.3°、0.5°時,姿態自適應系統的推進正壓力響應曲線.對比仿真曲線可以看出:姿態自適應系統推進正壓力的響應狀況與主梁偏角關系較小;當推進正壓力信號有階躍突變時,系統有較快的響應速度,超調量不大于4%,具有良好的穩定性.
4 結 論
(1)姿態自適應推進系統大幅度減小了原有推進系統所產生的推進干擾力,改善了關鍵部件的受力狀況,提高了關鍵部件的使用壽命,避免了因推進干擾力使刀盤中心偏離預定軌跡的現象.
(2)姿態自適應推進系統中推進正壓力超調可以控制在5%以內,響應較快,具有良好的穩定性.
(3)姿態自適應推進系統控制策略簡單,易于實現工程應用,有利于TBM施工自動化,為姿態自動糾偏系統的開發奠定了基礎.
(
):
[1]杜彥良,杜世杰.全斷面巖石隧道掘進機-系統原理與集成設計[M].武漢:華中科技大學出版社,2011:1-16.nel boring machine(TBM)selection using fuzzy multicriteria decision making methods[J].Tunnelling and Underground Space Technology,2012,30:194-204.
[2]吳波,陽軍生.巖石隧道全斷面掘進機施工技術[M].合肥:安徽科學技術出版社,2008:1-3.
[3]周賽群.全斷面硬巖掘進機TBM)驅動系統的研究[D].杭州:浙江大學,2008.
ZHOU Sai-qun.Study on drive system of the full-face rock tunnel boring machine[D].Hangzhou:Zhejiang University,2008.
[4]張鏡劍,傅冰駿.隧道掘進機在我國應用的進展[J].巖石力學與工程學報,2007,26(2):226-238.
ZHANG Jing-jian,FU Bing-jun.Advances in tunnel boring machine application in China[J].Chinese Journal of Rock Mechanics and Engineering,2007,26(2):226-238.
[5]YAGIZ S,GOKCEOGLU C,SEZER E.Application of two non-linear prediction tools to the estimation of tunnel boring machine performance[J].Engineering Applications of Articial Intelligence,2009,22(4/5):808-814.
[6]GHOLAMNEJAD J,TAYARANI N.Application of artificial neural networks to the prediction of tunnel boring machine penetration rate[J].Mining Science and Technology,2010,20(5):727-733.
[7]龔秋明,佘祺銳,侯哲生,等.高地應力作用下大理巖巖體的TBM掘進試驗研究[J].巖石力學與工程學報,2010,29(12):2522-2532.
GONG Qiu-ming,SHE Qi-rui,HOU Zhe-sheng,et al.Experimental study of TBM penetration in marble rock mass under high geostress[J].Chinese Journal of Rock Mechanics and Engineering,2010,29(12):2522-2532.
[8]YAZDANI-CHAMZINI A,YAKHCHALI S H.Tun-

圖12 不同調向角度推進干擾力曲線Fig.12 Disturbing force curves in different attitude angles
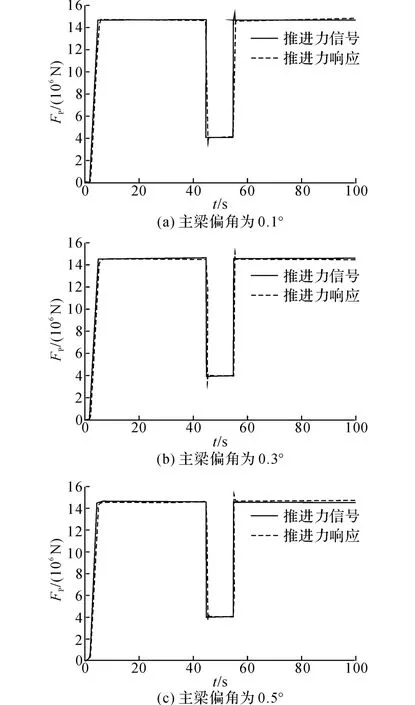
圖13 不同調向角度推進正壓力曲線Fig.13 Thrust force curves in different attitude angles
[9]黃先祥,馬長林,高欽和,等.大型裝置起豎系統協同仿真研究[J].系統仿真學報,2007,19(1):1-2.
HUANG Xian-xiang,MA Chang-lin,GAO Qin-he,et al.Studies for collaborative simulation of large erection mechanism system[J].Journal of System Simulation,2007,19(1):1-2.
[10]李劍峰,汪建兵,林建軍,等.機電系統聯合仿真與集成優化案例解析[M].北京:電子工業出版社,2010:1-10.
[11]熊光楞,郭斌,陳曉波,等.協同仿真與虛擬樣機技術[M].北京:清華大學出版社,2004:1-5.
[12]韓壽松,晃智強,劉相波.基于ADAMS和AMESim的液壓六自由度平臺聯合仿真研究[J].機床與液壓,2013,41(9):157-159.
HAN Shou-song,CHAO Zhi-qiang,LIU Xiang-bo.Co-simulation study on stewart platform based on ADAMS and AMESim[J].Machine Tool and Hydraulics,2013,41(9):157-159.
[13]王偉,傅新,謝海波,等.基于AMESim的液壓并聯機構建模及藕合特性仿真[J].浙江大學學報:工學版,2007,41(11):1876-1880.
WANG Wei,FU Xin,XIE Hai-bo,et al.Modeling of AMESim based hydraulic parallel mechanism and simulation of its coupling characteristics[J].Journal of Zhejiang University:Engineering Science,2007,41(11):1876-1880.
[14]魏建華,杜恒,方向,等.基于ADAMS/Simulink/AMESim的油氣懸架道路友好性分析[J].農業機械學報,2010,41(10):11-17.
WEI Jian-hua,DU Heng,FANG Xiang,et al.Roadfriendliness of interconnected hydro-pneumatic suspension based on ADAMS/Simulink/AMESim[J].Transactions of the Chinese Society for Agricultural Machinery,2010,41(10):11-17.
[15]侯典清.盾構推進系統順應性及掘進姿態控制研究[D].杭州:浙江大學,2013.
HOU Dian-qing.Research on compliance characteristics and attitude control of shield propulation system [D].Hangzhou:Zhejiang University,2013.
Adaptive attitude control of thrust system for hard rock tunnel boring machine
ZHANG Zhen1,GONG Guo-fang1,WU Wei-qiang1,LIU Tong1,RAO Yun-yi1,ZHOU Jian-jun2
(1.State Key Laboratory of Fluid Power Transmission and Control,Zhejiang University,Hangzhou 310027,China;2.State Key Laboratory of Shield Machine and Boring Technology,China Railway Tunnel Group Limited Company,Zhengzhou 450003,China)
A new adaptive attitude(ADA)tunnel boring machine(TBM)thrust system was proposed to overcome the problem of the service life of critical components and tunnel excavation precision reduced by disturbing force produced by four cylinders connected in parallel(CCP)thrust system.The mathematical model of thrust mechanism was established.Four cylinders were divided into two groups and working pressure of each group was adjusted in real time.The comparison of ADA thrust system and CCP thrust system was conducted by using co-simulation of ADAMS AMESim and Simulink when the deflection angle was0.1°,0.3°and0.5°under rated thrust force.Results showed that the disturbing force in ADA thrust system was2%comparing to disturbing force in CCP thrust system.The overshoot of force paralleled to main beam in ADA thrust system was less than 5%.ADA thrust system can significantly improve performance in reducing the disturbing force,and the system has a good stability.
tunnel boring machine(TBM);thrust system;attitude self-adaption;disturbing force
TH137;U 455
A
1008-973X(2015)10-1870-08
2015-03-16.浙江大學學報(工學版)網址:www.journals.zju.edu.cn/eng
國家“863”高技術研究發展計劃資助項目(2012AA041803);國家“973”重點基礎研究發展規劃資助項目(2013CB035400).
張振(1990—),男,碩士生,從事大型掘進裝備電液控制技術的研究.E-mail:qlzhangzhen@163.com
龔國芳,男,教授.E-mail:gfgong@zju.edu.cn
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
